磁力可控轮足模块及轮腿机构及轮腿复合爬行机器人
本发明涉及爬行机器人,更具体地,涉及一种磁力可控轮足模块及轮腿机构及轮腿复合爬行机器人。
背景技术:
1、爬行机器人在核工业、造船业、电力以及高空清洁等行业有着巨大的应用前景,它是代替人工进行高危作业和提高作业效率的重要技术;爬行机器人较常用于工业检测、喷涂、焊接和清洁等场合,虽然在工业检测方面采用无人机视检的方式可以较好地满足非接触式检测的工作要求,但对于接触式检测、较多障碍物的环境或者较大负载的工作,爬行机器人有着不可代替的作用。
2、中国专利cn113525558a公开了一种轮式机器人及可分体的轮腿复合机器人,该发明涉及一种轮式机器人及可分体的轮腿复合机器人,轮式机器人包括连接模组和动力轮组,连接模组包括底座、安装于底座两侧的稳定轮组件,分别为第一稳定轮组件和第二稳定轮组件;第一稳定轮组件和第二稳定轮组件均包括传动机构、与传动机构连接的脚轮和驱动传动机构伸展或收缩的驱动电机;传动机构在伸展的状态下,脚轮向外伸出;传动机构在收缩的状态下,脚轮收纳至位于动力轮组的直径圆范围内;轮式机器人通过稳定轮组件的作用能够在停止行驶的情况下保持自身姿态稳定且无需额外消耗能量。轮腿复合机器人可分别以足式机器人或轮式机器人的形态工作,而当两种组合形态下工作时,轮腿复合机器人整体兼顾了运动效率与跨越障碍与过渡壁面的性能。上述方案虽能实现永磁体与作业面之间的吸附,但磁吸附力不可主动控制或调整,机器人的足部无法抬离导磁介质,而跨越复杂的障碍;此外,上述爬行机器人也不能实现运动与吸附磁力之间矛盾的协调。
技术实现思路
1、本发明为克服上述现有技术中的缺陷,提供一种磁力可控轮足模块及轮腿机构及轮腿复合爬行机器人,通过控制轮足模块的磁力,具有轮式有吸附力、足式有吸附力、无吸附力三状态,使得机器人在壁面上具备轮式模式和足式模式两种模式,运动更加灵活,能更好的攀爬越障。
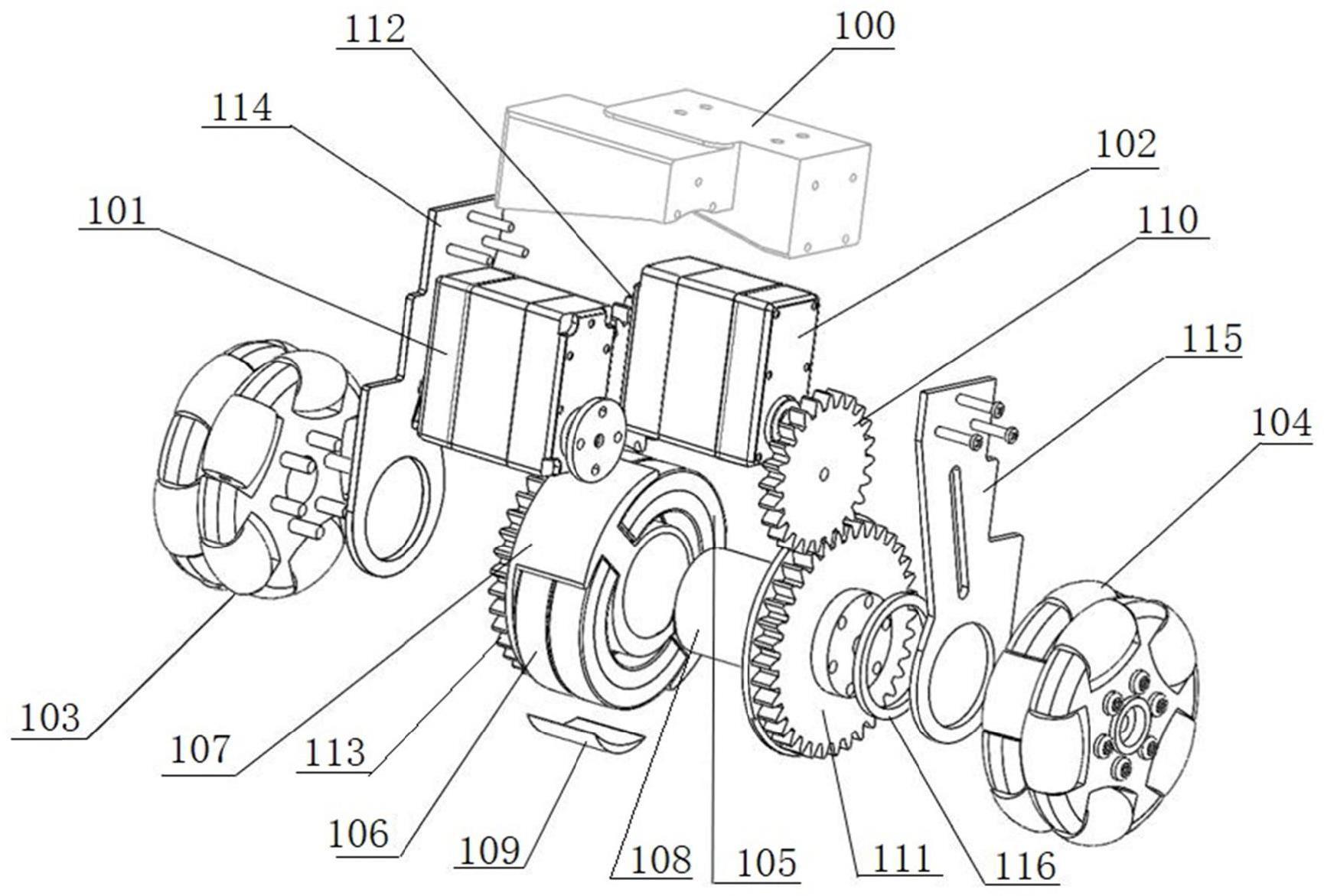
2、为解决上述技术问题,本发明采用的技术方案是:一种磁力可控轮足模块,包括安装座、第一舵机、第二舵机、第一全向轮、第二全向轮、第一传动机构、第二传动机构、第一磁铁、第二磁铁、磁铁支架、转轴以及垫脚;磁铁支架转动套设于转轴上,第一全向轮和第二全向轮分别安装于转轴的两端;第一磁铁和第二磁铁周向间隔安装于磁铁支架上,垫脚安装于第二磁铁的外周;第一舵机和第二舵机均安装于安装座上,第一舵机通过第一传动机构与转轴连接,第一舵机驱动所述转轴转动;第二舵机通过第二传动机构与磁铁支架连接,第二舵机驱动所述磁铁支架绕转轴转动。在本发明中,第一舵机控制第一全向轮和第二全向轮的转动,实现轮足模块的轮式运动;第二舵机通过第二传动机构控制磁铁支架的转动,通过转动磁铁支架,以调整第一磁铁和第二磁铁与吸附壁面的位置;当第一磁铁位于吸附壁面侧,则通过第一磁铁的磁力吸附壁面,实现轮式有吸附力,此时第一全向轮和第二全向轮仍保持与吸附壁面接触;当第二磁铁位于吸附壁面侧,则通过第二磁铁的磁力吸附壁面,此时,垫脚与吸附壁面接触,第一全向轮和第二全向轮与吸附壁面分离,实现足式有吸附力;当第一磁铁和第二磁铁均不在吸附壁面侧,实现无吸附力,此时第一全向轮与第二全向轮与吸附壁面接触。
3、在本发明中,通过将全向轮与永磁铁结合,设计出一种磁力可控可调的轮足模块,该轮足模块包括三种状态:轮式有吸附力、足式有吸附力、无吸附力;通过将轮足模块安装在机器人足部的末端,使得机器人在壁面上具备轮式模式和足式模式两种运动模式,即可实现轮式全向运动及足式运动;本发明的轮腿复合爬行机器人,通过控制轮足模块的吸附状态,可以灵活迅速切换全向轮式运动模式,实现在钢结构表面的高效灵活移动以及攀爬时的跨越沟壑、越障、壁面过渡等动作。
4、在其中一个实施例中,垫脚最外侧到转轴的中心距值大于第一全向轮和第二全向轮的半径值。当第二磁铁转动到吸附壁面一侧时,垫脚与吸附壁面接触,通过垫脚实现足式运动,此时第一全向轮和第二全向轮与壁面分离。
5、在其中一个实施例中,第一传动机构和第二传动机构为齿轮传动机构、皮带传动机构或链条传动机构。
6、在其中一个实施例中,第一传动机构包括第一齿轮和第二齿轮;第一齿轮与第一舵机的输出端连接,第二齿轮同轴设置于转轴上,第一齿轮和第二齿轮啮合;第二传动机构包括第三齿轮和第四齿轮,第三齿轮与第二舵机的输出端连接,第四齿轮同轴设置于磁铁支架上,第三齿轮与第四齿轮啮合。第一舵机带动第一齿轮转动,第一齿轮带动第二齿轮转动从而可驱动转轴转转动,以带动全向轮旋转;第二舵机带动第三齿轮转动,第三齿轮带动第四此轮转动从而可驱动磁铁支架转动,进而带动磁铁旋转,以改变轮足模块的吸附状态。
7、第一齿轮包括齿轮及舵盘,舵盘通过螺钉将齿轮与第一舵机连接在一起,第一齿轮是用于传递动力,使得全向轮发生转动;第三齿轮包括齿轮及舵盘,舵盘通过螺钉将齿轮与第二舵机连接在一起,第三齿轮是用于实现轮足模块吸附力状态的装换,以适应机器人不同模式运动时吸附力的要求。
8、在其中一个实施例中,第一磁铁和第二磁铁均为半环形径向磁铁,且第一磁铁和第二磁铁成180°安装于磁铁支架上,位于转轴的两侧。第一磁铁和第二磁铁成正对180°,被安装在磁铁支架上,通过控制带磁铁支架转动,可改变磁铁与被吸附壁面的位置,进而改变吸附力的大小,轮足模块与被吸附壁面的吸附力可调整至接近0,即脱吸附状态。
9、第一磁铁是一个半环形径向磁铁,第一磁铁为机器人轮式运动提供吸附力,被安装在磁铁支架上,当第一磁铁正对被吸附壁面时,轮足模块处于轮式有吸附力状态,第一磁铁的磁铁始终未与被吸附面接触,因此不会对轮式运动造成阻碍;第二磁铁是一个环形径向磁铁,第二磁铁为机器人足式运动提供吸附力,被安装在带齿轮磁铁支架上,垫脚被粘附在第二磁铁外圆弧的表面上,当第二磁铁正对被吸附面时,垫脚与被吸附面直接接触,为足式运动提供摩擦力,此时全向轮脱离了被吸附壁面,避免由于全向轮的自由滚子滚动而使得机器人的足部与被吸附壁面发生滑动,导致无法正常进行足式运动。
10、在其中一个实施例中,垫脚为橡胶片,垫脚安装于第二磁铁的外圆周表面。第一全向轮和第二全向轮通过螺钉分别固定在带齿轮转轴的两端,带齿轮转轴转动时,带动全向轮转动。另外,还设有第一挡环和第二挡环,第一挡环、第二挡环与转轴同轴安装,起到防止转轴轴向窜动的作用。
11、在其中一个实施例中,还包括第一侧板和第二侧板,第一侧板的一端套设于转轴上,另一端固定于安装座上;第二侧板的一端套设于转轴上,另一端固定于安装座上;第一传动机构和第二传动机构位于第一侧板与第二侧板之间。通过第一侧板和第二侧板,限制齿轮的径向移动,而保证齿轮的配合中心距不变。
12、本发明还提供一种轮腿机构,包括第一躯干舵机、第二躯干舵机、第三躯干舵机、第一连杆、第二连杆以及以上轮足模块;第一躯干舵机的输出端与第一连杆的一端连接,第一连杆的另一端与第二躯干舵机的输出端连接,第二躯干舵机与第二连杆的一端连接,第二连杆的另一端与第三躯干舵机的输出端连接,第三躯干舵机通过连接件与轮足模块的安装座固定连接。更具体的,第一躯干舵机的转子固定在第一连杆上;第二躯干舵机的定子固定在第二连杆上,第二躯干舵机的转子固定在第一连杆上;第三躯干舵机的定子固定在轮足模块上,第三躯干舵机的转子固定在第二连杆上;第三躯干舵机与轮足模块通过第一支架连接。
13、本发明还提供一种复合爬行机器人,包括中心基座、控制器、至少4条轮腿机构;4条轮腿机构间隔安装与中心基座上,控制器安装于中心基座上,控制器分别与第一舵机、第二舵机、第一躯干舵机、第二躯干舵机以及第三躯干舵机通信连接。四组轮足模块分别采用一个驱动组件进行驱动,可以通过控制四条三自由度的腿而改变四组轮足模块的位置分布,通过改变四组轮足模块的位置分布以及控制四组轮足模块上的全向轮的转速,可实现机器人的轮式全向运动。本发明的轮腿复合爬行机器人,通过来回切换轮足模块的足式有吸附力及无吸附力两个状态,使得腿部完成攀爬动作;三自由度的腿赋予机器人较好的运动自由度,使机器人具有更加灵活的运动形式与更高的越障、壁面过渡能力;且本发明的轮腿复合四足爬行机器人的工作模式可在轮式模式和足式模式之间自由切换,具有广泛的应用范围。
14、在其中一个实施例中,中心基座包括底板、顶板、多块基座侧板,底板与顶板通过多块基座侧板连接,组成盒子形状;在基座侧板上呈中心对称或轴对称设置有4个接口,4条轮腿机构分别与4个接口连接。
15、与现有技术相比,有益效果是:
16、本发明的磁力可控轮足模块,通过控制磁铁旋转,改变磁铁与被吸附面之间的位置,而使得轮足模块具有三种吸附状态:轮式有吸附力、足式有吸附力、无吸附力三种状态;通过将轮足模块安装在机器人足部的末端,使得机器人在壁面上具备轮式模式和足式模式两种模式,即可实现轮式全向运动及足式运动;
17、本发明的磁力可控轮足模块,上面安装有两个同步转动的全向轮,通过控制四个轮足模块的位置摆放,以及控制全向轮的转动速度,即可实现机器人轮式全向运动,使得机器人可以在壁面上灵活运动;
18、本发明的轮腿复合爬行机器人,采用多自由度的腿和轮足模块的足部相结合,通过控制轮足模块的吸附状态,可以灵活迅速切换轮式全向运动和足式运动,实现在钢结构表面的高效灵活移动以及攀爬时的跨越沟壑、越障、壁面过渡等动作。
- 还没有人留言评论。精彩留言会获得点赞!