方向盘转向助力方法及装置与流程
本技术涉及电动转向助力系统,尤其涉及一种方向盘转向助力方法及装置。
背景技术:
1、电动转向助力系统(electric power steering,eps)是一种依靠电机提供转向助力的动力转向系统,eps系统通常由电机、控制器、力矩传感器等部件组成。
2、其中,当驾驶员转动方向盘时,转向管柱中的扭杆产生相应形变,力矩传感器根据扭杆产生的形变,确定方向盘对应的力矩值,并将确定的力矩值发送给控制器,此时,控制器便会根据接收到的力矩值计算输出电流,并根据计算得到的输出电流控制电机,以便电机提供相应的方向盘转向助力。
3、然而,当力矩传感器发生故障无法确定方向盘对应的力矩值时,控制器便无法计算得到相应的输出电流,从而无法控制电机提供方向盘转向助力,进而会导致驾驶员因方向盘转动沉重而无法操纵车辆的情况出现。
技术实现思路
1、本技术实施例提供一种方向盘转向助力方法及装置,主要目的在于当力矩传感器发生故障无法确定方向盘对应的力矩值时,保证控制器能够控制电机提供方向盘转向助力。
2、为解决上述技术问题,本技术实施例提供如下技术方案:
3、第一方面,本技术提供了一种方向盘转向助力方法,所述方法应用于eps系统中的控制器,所述方法包括:
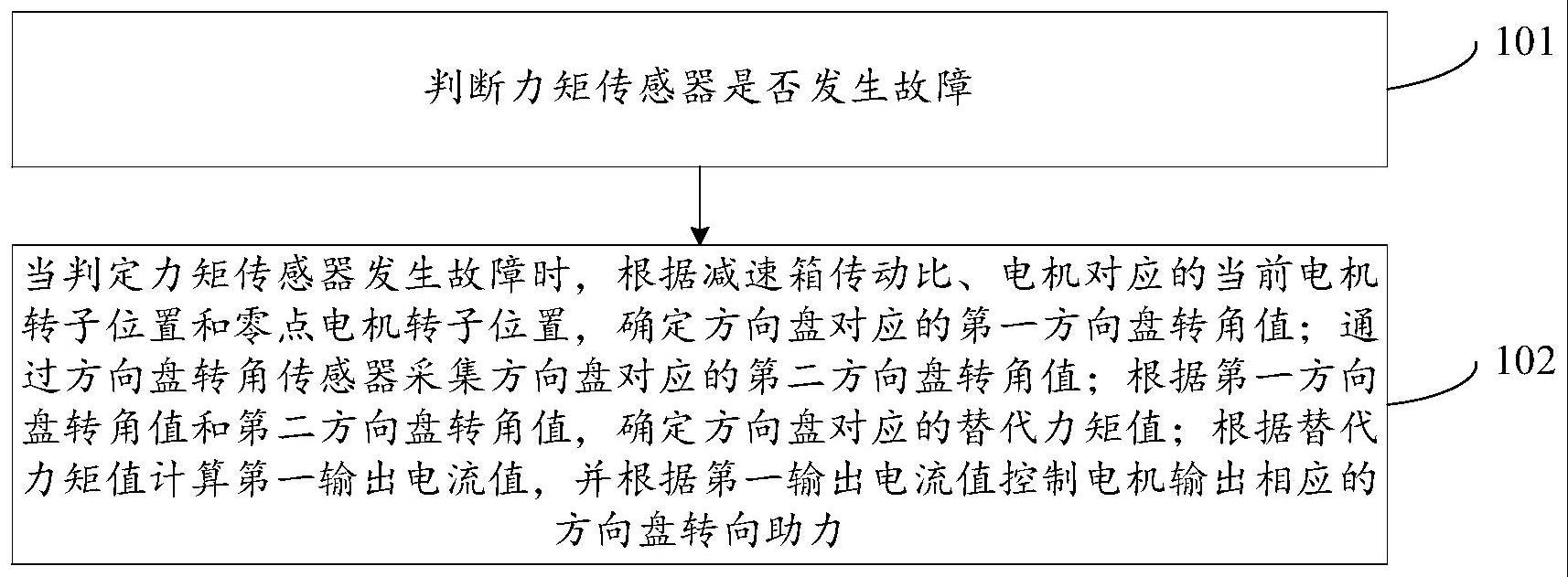
4、判断力矩传感器是否发生故障;
5、若是,则根据减速箱传动比、电机对应的当前电机转子位置和零点电机转子位置,确定方向盘对应的第一方向盘转角值;通过方向盘转角传感器采集所述方向盘对应的第二方向盘转角值;根据所述第一方向盘转角值和所述第二方向盘转角值,确定所述方向盘对应的替代力矩值;根据所述替代力矩值计算第一输出电流值,并根据所述第一输出电流值控制电机输出相应的方向盘转向助力。
6、可选的,所述根据减速箱传动比、电机对应的当前电机转子位置和零点电机转子位置,确定方向盘对应的第一方向盘转角值,包括:
7、采集所述电机对应的当前电机转子位置;
8、将所述根据减速箱传动比、所述电机对应的当前电机转子位置和零点电机转子位置代入第一预设公式中,以计算所述方向盘对应的第一方向盘转角值。
9、可选的,所述根据所述第一方向盘转角值和所述第二方向盘转角值,确定所述方向盘对应的替代力矩值,包括:
10、将所述第一方向盘转角值和所述第二方向盘转角值代入第二预设公式中,以计算所述方向盘对应的转角差值;
11、根据所述转角差值在预置数据表中查找所述方向盘对应的替代力矩值,其中,所述预置数据表中记录有多个扭杆转角值和每个所述扭杆转角值对应的力矩值。
12、可选的,所述根据所述第一方向盘转角值和所述第二方向盘转角值,确定所述方向盘对应的替代力矩值,包括:
13、将所述第一方向盘转角值和所述第二方向盘转角值代入第二预设公式中,以计算所述方向盘对应的转角差值;
14、将所述转角差值和扭杆刚度值代入第三预设公式中,以计算所述方向盘对应的替代力矩值。
15、可选的,所述方法包括:
16、若否,则接收所述力矩传感器发送的当前力矩值;根据所述当前力矩值计算第二输出电流值,并根据所述第二输出电流值控制所述电机输出相应的方向盘转向助力。
17、可选的,在所述根据减速箱传动比、电机对应的当前电机转子位置和零点电机转子位置,确定方向盘对应的第一方向盘转角值之前,所述方法还包括:
18、控制故障灯点亮。
19、第二方面,本技术还提供一种方向盘转向助力装置,所述装置应用于eps系统中的控制器,所述装置包括:
20、判断单元,用于判断力矩传感器是否发生故障;
21、第一计算单元,用于当所述判断单元判定所述力矩传感器发生故障时,根据减速箱传动比、电机对应的当前电机转子位置和零点电机转子位置,确定方向盘对应的第一方向盘转角值;通过方向盘转角传感器采集所述方向盘对应的第二方向盘转角值;根据所述第一方向盘转角值和所述第二方向盘转角值,确定所述方向盘对应的替代力矩值;根据所述替代力矩值计算第一输出电流值,并根据所述第一输出电流值控制电机输出相应的方向盘转向助力。
22、可选的,所述第一计算单元,具体用于:采集所述电机对应的当前电机转子位置;将所述根据减速箱传动比、所述电机对应的当前电机转子位置和零点电机转子位置代入第一预设公式中,以计算所述方向盘对应的第一方向盘转角值。
23、可选的,所述第一计算单元,具体用于:将所述第一方向盘转角值和所述第二方向盘转角值代入第二预设公式中,以计算所述方向盘对应的转角差值;根据所述转角差值在预置数据表中查找所述方向盘对应的替代力矩值,其中,所述预置数据表中记录有多个扭杆转角值和每个所述扭杆转角值对应的力矩值。
24、可选的,所述第一计算单元,具体用于:将所述第一方向盘转角值和所述第二方向盘转角值代入第二预设公式中,以计算所述方向盘对应的转角差值;将所述转角差值和扭杆刚度值代入第三预设公式中,以计算所述方向盘对应的替代力矩值。
25、可选的,所述装置还包括:
26、第二计算单元,用于当所述判断单元判定所述力矩传感器未发生故障时,接收所述力矩传感器发送的当前力矩值;根据所述当前力矩值计算第二输出电流值,并根据所述第二输出电流值控制所述电机输出相应的方向盘转向助力。
27、可选的,所述装置还包括:
28、控制单元,用于在所述第一计算单元根据减速箱传动比、电机对应的当前电机转子位置和零点电机转子位置,确定方向盘对应的第一方向盘转角值之前,控制故障灯点亮。
29、第三方面,本技术的实施例提供了一种存储介质,所述存储介质包括存储的程序,其中,在所述程序运行时控制所述存储介质所在设备执行第一方面所述的方向盘转向助力方法。
30、第四方面,本技术的实施例提供了一种方向盘转向助力装置,所述装置包括存储介质;及一个或者多个处理器,所述存储介质与所述处理器耦合,所述处理器被配置为执行所述存储介质中存储的程序指令;所述程序指令运行时执行第一方面所述的方向盘转向助力方法。
31、借由上述技术方案,本技术提供的技术方案至少具有下列优点:
32、本技术提供一种方向盘转向助力方法及装置,本技术能够在eps系统中的控制器判定力矩传感器发生故障后,由控制器先根据减速箱传动比、电机对应的当前电机转子位置和零点电机转子位置,确定方向盘对应的第一方向盘转角值;再通过方向盘转角传感器采集方向盘对应的第二方向盘转角值;然后,根据第一方向盘转角值和第二方向盘转角值,确定方向盘对应的替代力矩值;最后,根据替代力矩值计算第一输出电流值,并根据第一输出电流值控制电机输出相应的方向盘转向助力,从而使得当力矩传感器发生故障时,控制器仍然能够控制电机提供方向盘转向助力。
33、上述说明仅是本技术技术方案的概述,为了能够更清楚了解本技术的技术手段,而可依照说明书的内容予以实施,并且为了让本技术的上述和其它目的、特征和优点能够更明显易懂,以下特举本技术的具体实施方式。
- 还没有人留言评论。精彩留言会获得点赞!