本发明涉及电动汽车线控转向,具体是一种冗余式双电机转向机构及其控制方法。
背景技术:
1、随着电动汽车的快速发展,线控技术在汽车底盘域的应用愈加广泛。其中线控转向技术是滑板式底盘、车轮角模块实现的基础。线控转向技术是将驾驶员的转向动作转换成电信号传递给车载电控单元ecu,进而通过程序发出控制指令,以实现控制执行机构进行转向。省去了各部件之间的机械连接。
2、市场上基于滑板式底盘和车轮角模块的线控转向机构,一般是通过电机经过减速器驱动转向节进行转向,以此可以实现前轮转向、四轮转向、斜行、横行、原地转向等多种转向模式。但这些都缺乏安全可靠的冗余设计,在转向电机失效的情况下,将会引起严重的后果。一些双电机的冗余设计,通过两个电机的输出轴分别与两个小齿轮配合后同时与一个大齿轮啮合,进而将动力用来驱动转向。一个电机驱动时,也会带动另一个电机,从而增大了电机负载和磨损,进而会缩短电机的寿命。而且当一个电机损坏锁死的情况下,另一个电机的动力也不能通过大齿轮进行驱动,从而起不到冗余式设计的功能。
3、鉴于此,本发明提供一种两个电机动力传递互不影响的冗余式双电机转向机构及其控制方法,即使在一个电机损坏锁死的情况下,仍能由另一个电机控制工作,能够极大地提高车辆的行驶安全性。
技术实现思路
1、本发明的目的在于提供一种冗余式双电机转向机构及其控制方法,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种冗余式双电机转向机构,用于将轮端总成的转向节与上悬架臂连接,所述冗余式双电机转向机构包括:
4、下壳体;
5、上壳体,安装在所述下壳体一侧并与其固定连接;
6、第一转向电机,固定安装在所述下壳体远离上壳体的一侧;
7、第二转向电机,固定安装在所述上壳体远离下壳体的一侧;
8、齿轮输出轴总成,转动安装在所述上壳体与下壳体之间;
9、行星齿轮减速器,转动安装在所述上壳体与下壳体之间并与第一转向电机和第二转向电机相连,所述行星齿轮减速器与齿轮输出轴总成相配合。
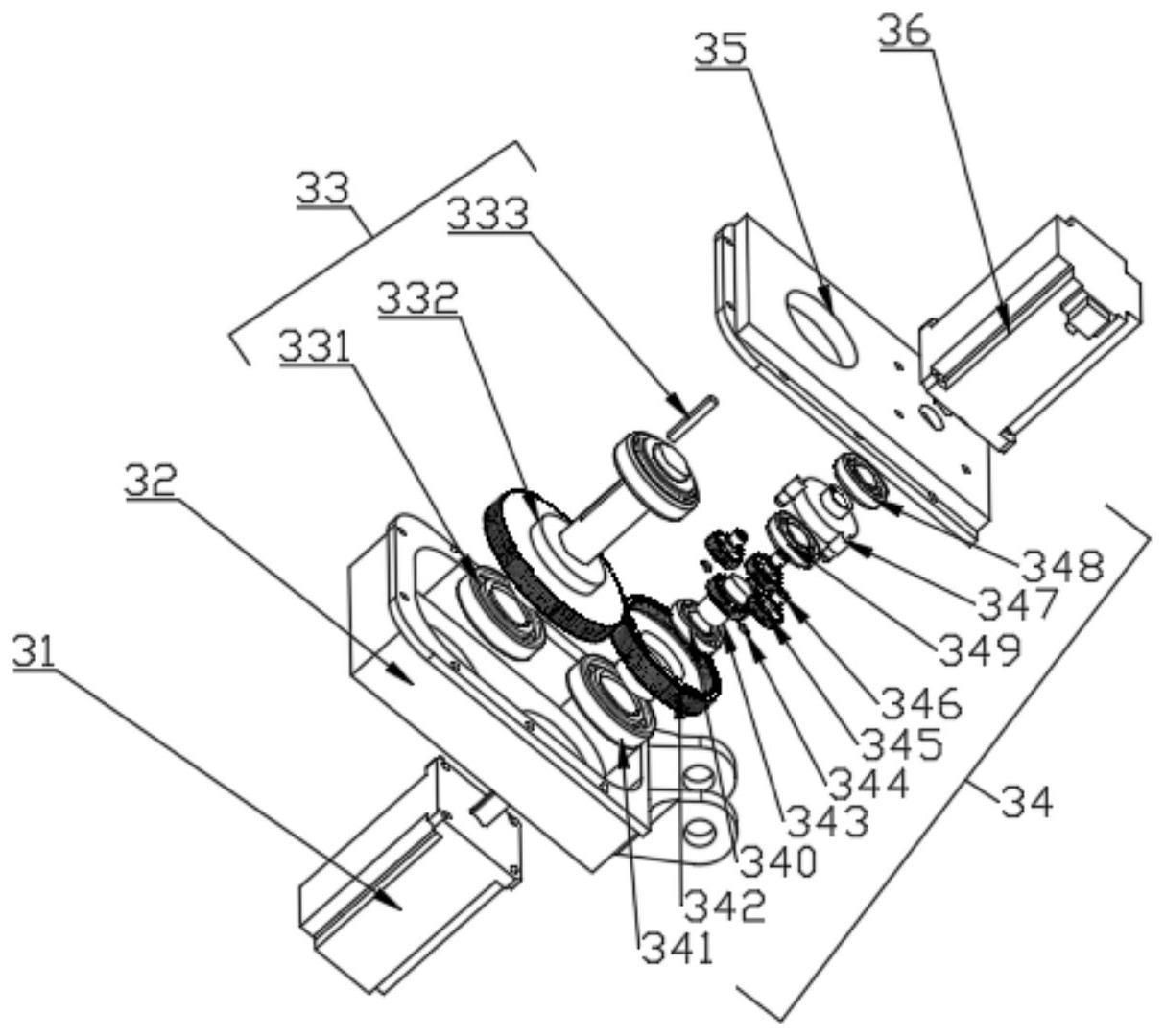
10、作为本发明的进一步技术方案,所述行星齿轮减速器包括:
11、行星架,包括行星架体、行星架孔和行星架卡簧槽;
12、三个滚针轴承,三个所述滚针轴承套设在行星架体上;
13、三个行星齿轮,三个所述行星齿轮的中心孔分别套设在三个滚针轴承上,并与其过盈配合;
14、三个卡簧,三个所述卡簧卡设在行星架卡簧槽c中,用于限制滚针轴承和行星齿轮的轴向位移;
15、太阳轮,一端轴与第一深沟球轴承的内圈过盈配合,另一端轴与第二深沟球轴承的内圈过盈配合,所述太阳轮与三个行星齿轮同时外啮合;
16、所述第一深沟球轴承外圈与行星架孔过盈配合;
17、所述第二深沟球轴承外圈与齿圈孔过盈配合;
18、所述齿圈与三个行星齿轮内啮合,所述齿圈远离第二深沟球轴承的一侧轴与第三深沟球轴承内圈过盈配合,第三深沟球轴承外圈过盈安装于下壳体的轴承孔中;
19、所述行星架远离滚针轴承的一端轴与第四深沟球轴承内圈过盈配合,所述第四深沟球轴承外圈过盈安装于上壳体的轴承孔中;
20、所述第一转向电机的输出轴通过平键与太阳轮相配合,所述第二转向电机的输出轴通过平键与行星架相配合。
21、作为本发明的更进一步技术方案,所述齿轮输出轴总成包括:
22、齿轮输出轴,一侧轴与圆锥滚子轴承内圈过盈配合,另一侧轴与另一圆锥滚子轴承内圈过盈配合;
23、平键,安装在齿轮输出轴一侧轴上的平键槽中,用于限制同侧的圆锥滚子轴承的轴向位移,同时用于传递扭矩动力;
24、所述齿轮输出轴远离平键一端的圆锥滚子轴承的外圈过盈安装于下壳体远离行星齿轮减速器的轴承孔中,所述齿轮输出轴靠近平键一端的圆锥滚子轴承的外圈过盈安装于上壳体远离行星齿轮减速器的轴承孔中;
25、所述齿轮输出轴的齿轮与行星齿轮减速器的齿圈外啮合。
26、作为本发明的再进一步技术方案,所述齿轮输出轴穿过转向节的上节臂安装孔,两者通过平键配合,所述齿轮输出轴的末端开设有螺纹,通过螺母和平键与转向节固定连接,用于限制冗余式双电机转向机构沿齿轮输出轴的轴向位移;所述齿轮输出轴靠近平键端的圆锥滚子轴承的端面抵住转向节上节臂的下表面,上壳体与转向节之间留有一定间隙,防止两者相对转动时摩擦。
27、作为本发明的再进一步技术方案,所述下壳体一侧外部伸出有耳片,用于和上悬架臂的一端通过螺栓连接,两者可以绕螺栓轴线自由转动,所述上悬架臂的另一端通过螺栓连接到车架或者车身上。
28、作为本发明的再进一步技术方案,所述轮端总成上安装有下悬架臂,所述下悬架臂的一端集成有球头,所述球头与转向节的下节臂通过螺栓连接,所述下悬架臂的另一端通过螺栓与车架或者车身相连。
29、作为本发明的再进一步技术方案,所述上悬架臂上安装有减震器,所述减震器的下端通过螺栓连接到轮端总成的下悬架臂的减震器基座上,所述减震器的上端通过螺栓连接到车架或者车身上。
30、作为本发明的再进一步技术方案,所述轮端总成集成有轮毂电机和制动系统,并通过螺栓螺母固定到转向节上。
31、一种冗余式双电机转向机构的控制方法,包括以下步骤:
32、通过转向电机的转角传感器和方向盘的转角传感器时刻采集两者的转角信号值,并将其传递给车载电控单元ecu;
33、车载电控单元ecu通过输入的方向盘转角信号值计算需要的转向电机转角,并向转向电机发出控制指令;所述方向盘转角与电机转角的关系通过标定预置储存到车载电控单元ecu中;
34、车载电控单元ecu读取反馈的转向电机实际转角,并比较转向电机的实际转角与计算得出的转向电机转角,如果两者差值在误差允许范围内,则不进行任何操作,如果两者相差较大,进而做出控制转向电机起闭的决策并进行故障报警。
35、作为本发明的进一步技术方案,冗余式双电机转向机构的控制方法包括以下步骤:
36、首先车辆启动时,通过车载电控单元ecu控制与方向盘相连的用于模拟路感的路感电机进行小转角输入,依次检测两个转向电机是否故障;若一侧车轮检测出其中一个转向电机故障,相应转向电机的故障标志设为1并储存在车载电控单元ecu中,那么在启动检测后启用另一个转向电机;若两个转向电机都故障,则无法对车辆进行后续操作;若两个转向电机都无故障,则默认启用第一转向电机;
37、若启动后无转向电机工作,说明一侧车轮两个转向电机都发生故障,则不能对车辆进行后续操作并发出故障警告;
38、若启动后为第一转向电机工作,则控制第二转向电机的抱闸系统工作,第二转向电机不被带动,即行星架固定,减轻第一转向电机的负荷,动力经第一转向电机、太阳轮、行星齿轮、齿圈进而传递给齿轮输出轴;若车载电控单元ecu检测转向电机的实际转角与需要的转向电机转角相差过大,判断第二转向电机的故障标志是否为1,若为1,说明一侧车轮两个电机同时故障,则发出故障警告并控制车辆减速停车;若不为1,则启动第二转向电机工作,控制第一转向电机的抱闸系统工作,第一转向电机不被带动,即太阳轮固定,减轻第二转向电机的负荷,动力经第二转向电机、行星架、行星齿轮、齿圈进而传递给齿轮输出轴;车载电控单元ecu继续检测转向电机的实际转角与需要的转向电机转角,若两者相差过大,说明此时一侧车轮两个转向电机都故障,发出故障警告并控制车辆减速停车;
39、若启动后为第二转向电机工作,说明第一转向电机已经故障,则控制第一转向电机的抱闸系统工作,第一转向电机不被带动,即太阳轮固定,减轻第二转向电机的负荷,动力经第二转向电机、行星架、行星齿轮、齿圈进而传递给齿轮输出轴;车载电控单元ecu继续检测转向电机的实际转角与需要的转向电机转角,若两者相差过大,说明此时一侧车轮两个转向电机都故障,发出故障警告并控制车辆减速停车。
40、与现有技术相比,本发明的有益效果是:
41、1、冗余式双电机转向机构布置在转向节上节臂的下方,能够降低整车重心,且合理利用空间;
42、2、冗余式双电机转向机构的设计,在一个转向电机故障情况下,另一个转向电机能够接管转向任务,能够极大地提高汽车在行驶过程中的安全性;
43、3、采用行星齿轮减速器作为动力的耦合装置,一个转向电机工作时,启动另一个转向电机的抱闸系统,这样会减小两个转向电机的负荷与磨损,延长两者的使用寿命;两个转向电机的动力传递互不影响,即使在一个转向电机严重破损并且无法转动的情况下,亦不影响另一个转向电机的工作,是一种有效且可靠的冗余设计方案。