一种机器人婴儿车的制作方法
1.本实用新型涉及机器人技术领域,具体为一种机器人婴儿车。
背景技术:
2.在婴儿车已经普及的时候,带婴儿车出行已成常态,但也常常给人们的出行带来困扰。每当抱起婴儿的时候,婴儿车不可避免的就成为出行的累赘,特别是当一个人的时候,又要抱婴儿,还要推婴儿车,总有顾此失彼的状况发生,如婴儿车能够自动跟随家长便能够减少不必要的麻烦,方便人们的生活。
3.现有如中国专利公开号为cn109070922a的可转换婴儿车,特征是四个u形底架支撑杆能围绕接合侧铰接件旋转至完全伸展时的升起展开位置,此时处于遮盖的婴儿车或婴儿围栏构造,或者旋转至部分伸展时的降低展开位置,此时处于敞开的婴儿车构造,并且该可折叠可转换婴儿车能通过收缩为嵌套式布置被折叠处于折叠构造,该婴儿车在一人出行时不够方便,手中有物品时婴儿车推行不方便。
4.所以我们提出了一种机器人婴儿车,以便于解决上述中提出的问题。
技术实现要素:
5.本实用新型的目的在于提供一种机器人婴儿车,以解决上述背景技术提出的现有的多数婴儿车在一人出行时使用不方便的问题。
6.为实现上述目的,本实用新型提供如下技术方案:一种机器人婴儿车,包括控制系统集成仓、机器视觉及人机交互控制仓、婴儿睡篮:
7.所述控制系统集成仓左上方设置有机器视觉及人机交互控制仓,所述控制系统集成仓下方设置有轮脚电机驱动系统,且轮脚电机驱动系统外部连接有机器人轮脚,所述机器人轮脚外侧安装有轮脚保护罩,所述控制系统集成仓下端设置有电池仓,且控制系统集成仓上方设置有置物篮,所述置物篮上方设置有婴儿睡篮,且婴儿睡篮外部安装有婴儿篮围布,并且婴儿睡篮内部设置有婴儿篮坐卧调节板,所述婴儿睡篮上方连接有遮阳棚;
8.所述控制系统集成仓内部安装有陀螺仪底座,且陀螺仪底座内部设置有陀螺仪控制系统,所述陀螺仪底座上方连接有固定座,且固定座右上方安装有陀螺仪用电机,所述陀螺仪用电机左侧连接有陀螺仪飞轮;
9.所述机器视觉及人机交互控制仓前端连接有机器视觉摄像头,且机器视觉及人机交互控制仓前端上方安装有扬声器和麦克风,并且机器视觉及人机交互控制仓前端下方设置有人机交互屏幕,所述机器视觉及人机交互控制仓内部设置有人机交互系统和无线通信系统并且机器视觉及人机交互控制仓内部设置有语音交互系统和机器视觉控制系统;
10.所述婴儿睡篮下方连接有减震杆,且减震杆内部开设有安装槽,并且安装槽内部设置有减震弹簧,所述减震杆下端卡合连接有活动杆。
11.优选的,所述轮脚电机驱动系统为一套大扭矩低速驱动系统,且轮脚电机驱动系统时速为5~10km/h。
12.采用上述技术方案,轮脚电机驱动系统最高时速约同于成人步行速度,能够防止因意外导致机器人失速的状况发生。
13.优选的,所述控制系统集成仓内安装有mcu微电脑控制器,型号为昇腾310ai处理器,所述控制系统集成仓与机器视觉及人机交互控制仓和轮脚电机驱动系统构成完整的机器人系统。
14.采用上述技术方案,通过控制系统集成仓内安装的mcu微电脑控制器能够对机器人系统进行控制,能够接受和发送指令,并且有一定的自主判断能力。
15.优选的,所述无线通信系统能够发送和接收蓝牙信号,并且无线通信系统能与手机app或遥控器进行连接。
16.采用上述技术方案,通过手机或遥控器与婴儿车无线通信系统进行连接,可以便捷控制婴儿车的自主跟随方式,如前跟随,后跟随,左跟随,右跟随,以及在暂时不用时可以控制其驻车等候,使控制更加方便。
17.优选的,所述扬声器和麦克风与语音交互系统电气连接,所述语音交互系统通过麦克风接受语音指令,所述机器视觉摄像头与机器视觉控制系统电气连接,通过机器视觉摄像头能感知周围环境状况,并通过机器视觉控制系统传送信号至mcu微电脑控制器控制,控制轮脚电机驱动系统进行自主避障。
18.采用上述技术方案,机器人婴儿车在行进过程中遇到障碍物时,机器视觉摄像头将信息传输至机器视觉控制系统,通过机器视觉控制系统将分析后的数据发送至mcu微电脑控制器,并对轮脚电机驱动系统发出指令,控制机器人婴儿车行走、避障或停留。
19.优选的,所述活动杆上端与减震弹簧固定连接,且减震弹簧与活动杆构成活动结构。
20.采用上述技术方案,当遇到坑洼路面时,通过活动杆对减震弹簧进行挤压进行缓冲,保证上方婴儿睡篮的平稳,保证婴儿的舒适性。
21.优选的,所述控制系统集成仓内部设置有驻车辅助轮内置仓,且驻车辅助轮内置仓内部设置有驻车辅助轮底座,并且驻车辅助轮底座上端销轴连接有驻车辅助轮摇臂,所述驻车辅助轮摇臂上端安装有驻车辅助车轮,所述驻车辅助轮摇臂右侧连接有驻车辅助轮控制电机;
22.所述驻车辅助轮控制电机与驻车辅助轮摇臂构成旋转结构,以驻车辅助轮控制电机轴为转轴轴心。
23.采用上述技术方案,当机器人婴儿车驻停时,通过控制系统集成仓内部mcu微电脑控制器对驻车辅助轮控制电机发送指令,驻车辅助轮控制电机带动驻车辅助轮摇臂进行旋转,并放下驻车辅助车轮,此时轮脚电机驱动系统与陀螺仪控制系统能够进入休眠状态,节约电量,同时行走时驻车辅助轮控制电机转动将驻车辅助车轮收回驻车辅助轮内置仓。
24.与现有技术相比,本实用新型的有益效果是:该机器人婴儿车;
25.1、设置有控制系统集成仓与机器视觉及人机交互控制仓和轮脚电机驱动系统构成完整的机器人系统,机器人婴儿车有一定的自主判断能力,机器视觉及人机交互控制仓能感知周围环境,能够自主避障,且还能够通过手机或遥控器与无线通信系统连接进行控制,当双手不便时还能语音控制,语音交互系统能够对语音指令进行接收并处理,再通过控制系统集成仓对机器人婴儿车进行控制;
26.2、通过驻车辅助轮控制电机与驻车辅助轮摇臂构成的旋转结构,当机器人婴儿车驻停时,通过控制系统集成仓内部mcu微电脑控制器对驻车辅助轮控制电机发送指令,驻车辅助轮控制电机带动驻车辅助轮摇臂进行旋转,并放下驻车辅助车轮,此时轮脚电机驱动系统与陀螺仪控制系统能够进入休眠状态,节约电量,同时行走时驻车辅助轮控制电机转动将驻车辅助车轮收回驻车辅助轮内置仓。
附图说明
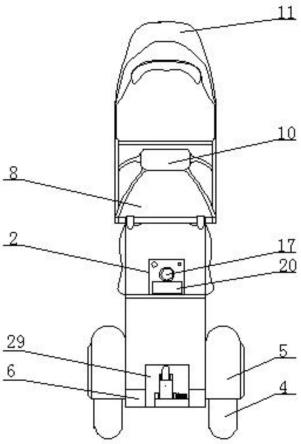
27.图1为本实用新型正视结构示意图;
28.图2为本实用新型侧视结构示意图;
29.图3为本实用新型陀螺仪用电机和陀螺仪飞轮结构示意图;
30.图4为本实用新型麦克风和语音交互系统结构示意图;
31.图5为本实用新型驻车辅助车轮和驻车辅助轮控制电机结构示意图;
32.图6为本实用新型图2中a处放大结构示意图。
33.图中:1、控制系统集成仓;2、机器视觉及人机交互控制仓;3、轮脚电机驱动系统;4、机器人轮脚;5、轮脚保护罩;6、电池仓;7、置物篮;8、婴儿睡篮;9、婴儿篮围布;10、婴儿篮坐卧调节板;11、遮阳棚;12、陀螺仪底座;13、陀螺仪控制系统;14、固定座;15、陀螺仪用电机;16、陀螺仪飞轮;17、机器视觉摄像头;18、扬声器;19、麦克风;20、人机交互屏幕;21、人机交互系统;22、无线通信系统;23、语音交互系统;24、机器视觉控制系统;25、减震杆;26、安装槽;27、减震弹簧;28、活动杆;29、驻车辅助轮内置仓;30、驻车辅助轮底座;31、驻车辅助轮摇臂;32、驻车辅助车轮;33、驻车辅助轮控制电机。
具体实施方式
34.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
35.请参阅图1-2,本实用新型提供一种技术方案:一种机器人婴儿车,包括控制系统集成仓1、机器视觉及人机交互控制仓2、婴儿睡篮8,控制系统集成仓1左上方设置有机器视觉及人机交互控制仓2,控制系统集成仓1下方设置有轮脚电机驱动系统3,且轮脚电机驱动系统3外部连接有机器人轮脚4,机器人轮脚4外侧安装有轮脚保护罩5,控制系统集成仓1下端设置有电池仓6,且控制系统集成仓1上方设置有置物篮7,置物篮7上方设置有婴儿睡篮8,且婴儿睡篮8外部安装有婴儿篮围布9,并且婴儿睡篮8内部设置有婴儿篮坐卧调节板10,婴儿睡篮8上方连接有遮阳棚11,通过婴儿篮坐卧调节板10能够调节婴儿的姿势,保证婴儿舒适性,同时上方遮阳棚11也能够调节遮挡角度,且轮脚电机驱动系统3为一套大扭矩低速驱动系统,且轮脚电机驱动系统3时速为5~10km/h,轮脚电机驱动系统3最高时速约同于成人步行速度,能够防止因意外导致机器人失速的状况发生,控制系统集成仓1内安装有mcu微电脑控制器,型号为昇腾310ai处理器,控制系统集成仓1与机器视觉及人机交互控制仓2和轮脚电机驱动系统3构成完整的机器人系统,通过控制系统集成仓1内安装的mcu微电脑控制器能够对机器人系统进行控制,能够接受和发送指令,并且具有一定的自主判断能力。
36.结合图1-4所示,控制系统集成仓1内部安装有陀螺仪底座12,且陀螺仪底座12内部设置有陀螺仪控制系统13,陀螺仪底座12上方连接有固定座14,且固定座14右上方安装有陀螺仪用电机15,陀螺仪用电机15左侧连接有陀螺仪飞轮16,机器视觉及人机交互控制仓2前端连接有机器视觉摄像头17,且机器视觉及人机交互控制仓2前端上方安装有扬声器18和麦克风19,并且机器视觉及人机交互控制仓2前端下方设置有人机交互屏幕20,所述机器视觉及人机交互控制仓2内部设置有人机交互系统21和无线通信系统22并且机器视觉及人机交互控制仓2内部设置有语音交互系统23和机器视觉控制系统24,陀螺仪用电机15控制陀螺仪飞轮16进行旋转,能够保证婴儿车行进时的稳定,无线通信系统22能够发送和接收蓝牙信号,并且无线通信系统22能与手机app或遥控器进行连接,通过手机或遥控器与婴儿车无线通信系统22进行连接,可以便捷控制婴儿车的自主跟随方式,如前跟随,后跟随,左跟随,右跟随,以及在暂时不用时可以控制其驻车等候,使控制更加方便,扬声器18和麦克风19与语音交互系统23电气连接,语音交互系统23通过麦克风19接受语音指令,机器视觉摄像头17与机器视觉控制系统24电气连接,通过机器视觉摄像头17能感知周围环境状况,并通过机器视觉控制系统24传送信号至mcu微电脑控制器控制,控制轮脚电机驱动系统3进行自主避障,机器人婴儿车在行进过程中遇到障碍物时,机器视觉摄像头17将信息传输至机器视觉控制系统24,通过机器视觉控制系统24将分析后的数据发送至mcu微电脑控制器,并对轮脚电机驱动系统3发出指令,控制机器人婴儿车行走、避障或停留,同时在使用者双手不便时可以通过语音发生指令,语音交互系统23能够通过麦克风19接受指令,并将指令传输至mcu微电脑控制器控制,再由mcu微电脑控制器控制机器人系统完成指令。
37.结合图1-6所示,婴儿睡篮8下方连接有减震杆25,且减震杆25内部开设有安装槽26,并且安装槽26内部设置有减震弹簧27,减震杆25下端卡合连接有活动杆28,活动杆28上端与减震弹簧27固定连接,且减震弹簧27与活动杆28构成活动结构,当遇到坑洼路面时,通过活动杆28对减震弹簧27进行挤压进行缓冲,保证上方婴儿睡篮8的平稳,保证婴儿的舒适性,控制系统集成仓1内部设置有驻车辅助轮内置仓29,且驻车辅助轮内置仓29内部设置有驻车辅助轮底座30,并且驻车辅助轮底座30上端销轴连接有驻车辅助轮摇臂31,驻车辅助轮摇臂31上端安装有驻车辅助车轮32,驻车辅助轮摇臂31右侧连接有驻车辅助轮控制电机33,驻车辅助轮控制电机33与驻车辅助轮摇臂31构成旋转结构,以驻车辅助轮控制电机33电机轴为转轴轴心,当机器人婴儿车驻停时,通过控制系统集成仓1内部mcu微电脑控制器对驻车辅助轮控制电机33发送指令,驻车辅助轮控制电机33带动驻车辅助轮摇臂31进行旋转,并放下驻车辅助车轮32,此时轮脚电机驱动系统3与陀螺仪控制系统13能够进入休眠状态,节约电量,同时行走时驻车辅助轮控制电机33转动将驻车辅助车轮32收回驻车辅助轮内置仓29。
38.工作原理:在使用该机器人婴儿车时,首先使用时可通过婴儿篮坐卧调节板10能够调节婴儿的姿势,保证婴儿舒适性,同时上方遮阳棚11也能够调节遮挡角度,控制系统集成仓1内部安装有陀螺仪稳定系统,能够保证行进时的平稳性,无线通信系统22能够发送和接收蓝牙信号,并且无线通信系统22能与手机app或遥控器进行连接,通过手机或遥控器与婴儿车无线通信系统22进行连接,可以便捷控制婴儿车的自主跟随方式,如前跟随,后跟随,左跟随,右跟随,以及在暂时不用时可以控制其驻车等候,驻停时控制系统集成仓1内部的mcu微电脑控制器对驻车辅助轮控制电机33发送指令,驻车辅助轮控制电机33带动驻车
辅助轮摇臂31进行旋转,并放下驻车辅助车轮32,此时轮脚电机驱动系统3与陀螺仪控制系统13能够进入休眠状态,节约电量,同时行走时驻车辅助轮控制电机33转动将驻车辅助车轮32收回驻车辅助轮内置仓29,同时语音交互系统23通过麦克风19接受语音指令,机器视觉摄像头17与机器视觉控制系统24电气连接,能够通过机器视觉摄像头17感知周围环境状况,并通过机器视觉控制系统24传送信号至mcu微电脑控制器控制,控制轮脚电机驱动系统3进行自主避障,机器人婴儿车在行进过程中遇到障碍物时,机器视觉摄像头17将信息传输至机器视觉控制系统24,通过机器视觉控制系统24将分析后的数据发送至mcu微电脑控制器,并对轮脚电机驱动系统3发出指令,控制机器人婴儿车行走、避障或停留,同时在使用者双手不便时可以通过语音发生指令,语音交互系统23能够通过麦克风19接受指令,并将指令传输至mcu微电脑控制器控制,再由mcu微电脑控制器控制机器人系统完成指令,且行进遇到坑洼路面时,通过活动杆28对减震弹簧27进行挤压进行缓冲,保证上方婴儿睡篮8的平稳,保证婴儿的舒适性,从而完成一系列工作。本说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
39.尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1