危爆物全地形探测车的制作方法
1.本实用新型属于危爆物探测设备技术领域,尤其涉及一种危爆物全地形探测车。
背景技术:
2.危爆物探测是危爆物安全处理的必要前提。传统的危爆物探测方式主要有人员携带探测器材或竹竿等简易工具徒步搜索、履带式探测小车携带探测器材搜索等。随着弹药发射平台的多样化、弹药射程的不断增大,产生危爆物的地形也多种多样,可能涉及沙地、沼泽、泥潭、沟壑、河流、陡坡等,人员搜索的不安全性、履带式探测小车对某些地形的不适应性等矛盾日益突出,迫切需要一种适应多种地形的未爆物探测车,对目标区域进行连续搜索。
技术实现要素:
3.本实用新型的目的是提供一种危爆物全地形探测车,旨在解决现有技术中人员搜索不安全、危爆物探测车对沙地、沟壑、河流等多种地形不适应的技术问题。
4.为解决上述技术问题,本实用新型所采取的技术方案是:
5.一种危爆物全地形探测车,包括中控台、车体、探地雷达及报警机构,所述车体设有四组能够在不同地形上行驶的行走机构,所述车体内设有用于控制旋转机构的控制模块及与控制模块相连的位置感应模块,所述探地雷达通过翻转机构与车体相连;所述探地雷达与报警机构相连,所述探地雷达、报警机构及控制模块均与中控台相连,用于控制车体及探地雷达的动作并根据车体及报警机构反馈的信息标定未爆物的位置坐标。
6.优选的,所述行走机构包括车轮和机械臂,所述车轮的中部设有轮毂电机,所述机械臂内设用于改变车轮位置的旋转电机,所述旋转电机及轮毂电机均与控制模块相连,所述控制模块与中控台无线连接。
7.优选的,所述机械臂包括固定臂和旋转臂,所述固定臂垂直固定于车体侧壁上,所述旋转电机设置于固定臂的末端,且旋转电机的旋转轴与旋转臂固定相连,所述旋转臂的另一端与车轮转动相连,通过旋转电机改变旋转臂及车轮的上下摆动角度。
8.优选的,所述位置感应模块包括陀螺仪和位置传感器,所述陀螺仪和位置传感器均与控制模块及中控台相连。
9.优选的,所述探地雷达设置于安装架上,所述安装架通过翻转机构与车体的端部相连,所述翻转机构均与控制模块及中控台相连,通过翻转机构驱动安装架贴于地面或反扣于车体顶部。
10.优选的,所述翻转机构包括连接臂及两个伸缩部件,两个伸缩部件分别设置于连接臂的上下两侧,所述伸缩部件的固定端与连接臂的相连,所述伸缩部件的活动端与安装架相连;所述连接臂的两端分别与车体的前端及安装架的后端转动相连;两个伸缩部件均与控制模块及中控台相连。
11.优选的,所述翻转机构还包括旋转台及用于驱动旋转台及连接臂转动的旋转组
件,所述旋转组件包括旋转部件一及旋转部件二,所述连接臂的后端通过旋转部件一与旋转台转动连接,所述旋转台通过旋转部件二与车体前端的安装座转动配合,所述旋转部件一设置于旋转台内,所述旋转部件二设置于安装座内;所述旋转组件由控制模块及中控台控制。
12.优选的,所述伸缩部件为液压缸;所述安装架为矩形框架,包括四周边框及顶部的多个并列支撑肋,所述探地雷达设置于左右两个边框之间,所述支撑肋的中间固定中间梁,所述中间梁的后端延伸至边框外部、且与连接臂转动连接。
13.优选的,所述车体为由方形铝制材料制作而成的空心壳体。
14.优选的,所述中控台设置于运输车上,所述中控台包括显示屏及中控主机;所述探地雷达及控制模块均与中控台无线连接。
15.采用上述技术方案所产生的有益效果在于: 与现有技术相比,本实用新型通过中控台远程控制车体在待探测区域行走,借助位置感应模块来判断路况并通过控制模块驱动旋转机构,进行驱动车体移动,实现探测车在平坦地面及沟壑等不同地形上的平稳行驶;同时中控台远程控制翻转机构使探地雷达贴于地面搜寻探测未爆物,利用报警机构来提醒工作人员标注未爆物位置。利用本实用新型能够确保人员安全、适应全地形探寻未爆物,扩展搜寻作业范围,实现快速、高效地对作业地域进行探测,有效提高搜寻效率,并将探测数据实时传输到中控台对反馈的数据信息进行处理,用以对发现未爆物地域的坐标进行标定。
附图说明
16.下面结合附图和具体实施方式对本实用新型作进一步详细的说明。
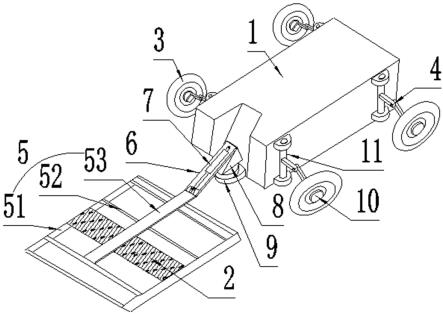
17.图1是本实用新型实施例提供的一种危爆物全地形探测车的工作状态示意图;
18.图2是图1中危爆物全地形探测车的非工作状态示意图;
19.图中:1-车体,2-探地雷达,3-车轮,4-机械臂,41-固定臂,42旋转臂;5-安装架,51-边框,52-支撑肋,53-中间梁;6-连接臂,7-伸缩部件,8-旋转台,9-安装座,10-轮毂电机,11-立轴。
具体实施方式
20.下面结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
21.参见图1、2,本实用新型提供的一种危爆物全地形探测车,包括中控台、车体1、探地雷达2及报警机构,所述车体1设有四组能够在不同地形上行驶的行走机构,所述车体1内设有用于控制旋转机构的控制模块及与控制模块相连的位置感应模块,所述探地雷达2通过翻转机构与车体1相连;所述探地雷达2与报警机构相连,所述探地雷达2、报警机构及控制模块均与中控台相连,用于控制车体1及探地雷达2的动作并根据车体1及报警机构反馈的信息标定未爆物的位置坐标。中控台远程遥控行走机构驱动车体移动,再控制翻转机构使探地雷达能够贴于地面搜寻探测未爆物,当探地雷达发现危爆物时报警机构发出警报,来提醒工作人员标注未爆物位置;不工作时则利用翻转机构将探地雷达反扣于车体顶部,
节省空间,便于运输。
22.在本实用新型的一个具体实施例中,如图1、2所示,所述行走机构包括车轮3和机械臂4,所述车轮3的中部设有轮毂电机10,所述机械臂4内设用于改变车轮3位置的旋转电机,所述旋转电机及轮毂电机10均与控制模块相连,所述控制模块与中控台无线连接。其中,所述机械臂4包括固定臂41和旋转臂42,所述固定臂41垂直固定于车体1侧壁上,所述旋转电机设置于固定臂41的末端,且旋转电机的旋转轴与旋转臂42固定相连,所述旋转臂42的另一端与车轮3转动相连,通过旋转电机改变旋转臂42及车轮3的上下摆动角度。
23.具体制作时,车体为长方体,并在车体两侧的前后端垂直固定四根立轴11,将固定臂41垂直安装在立轴11上。立轴11的上下两端均通过轴承与车体1转动配合,在车体内安装偏摆电机,通过偏摆电机驱动立轴旋转,进而实现固定臂的前后摆动。车轮通过偏摆电机及旋转电机实现前后摆动及上下摆动,可灵活跨越沟壑。
24.其中,控制模块是全地形危爆物探测车的大脑,主要用于接收控制人员指令,分析判断当前路况,输出指令控制行走机构,实现探测车多地形条件下的平稳行驶。四条机械臂均采用独立悬挂,可通过控制模块的控制指令实现独立动作。轮毂电机由控制模块指挥,可带动车轮转动,实现探测车的位置移动。
25.作为一种优选结构,所述位置感应模块包括陀螺仪和位置传感器,所述陀螺仪和位置传感器均与控制模块及中控台相连。陀螺仪和位置传感器实时探测路况信息,控制模块的车载电脑那个综合陀螺仪状态以及传感器回传数据,判断路况并控制机械臂内旋转电机和轮毂电机动作,确保探测车平稳安全移动。
26.当遇到沟壑或较窄河流时,探测车可实现沿沟壑行进或跨越沟壑。具体控制过程如下:
27.沿沟壑行进时,控制模块通过控制机械臂内旋转电机和轮毂电机的动作,可实现同侧两个车轮在沟壑里通行,另两个机械臂的旋转臂向上摆动,使其末端车轮能够搭在沟沿上通行,而车体却能保持稳定。跨越沟壑时,两只前车轮通过偏摆电机及旋转电机驱动使其固定臂向前摆动及旋转臂向上摆动实现交替爬到沟沿上,而后一只后车轮采用同样动作也爬上沟沿,最后另一只后车轮的机械臂伸长(及固定臂向后摆动、旋转臂转至水平状态),支撑探测车向上爬行,待车体大部分爬过沟沿后,最后一只机械臂(通过固定臂向前摆动及旋转臂向上摆动)可顺势爬上沟沿,实现轻松跨越沟壑。
28.在本实用新型的一个具体实施例中,如图1、2所示,所述探地雷达2设置于安装架5上,所述安装架5通过翻转机构与车体1的端部相连,所述翻转机构均与控制模块及中控台相连,通过翻转机构驱动安装架5贴于地面或反扣于车体1顶部。采用该结构方便在执行任务时,翻转机构驱动连接臂向前翻转,可使探地雷达紧贴地面,便于对地面及地下未爆物进行搜索;不执行搜索任务时,翻转机构再将连接臂向后翻转,进而将探地雷达折叠到车顶部,节省空间,便于运输。
29.在本实用新型的一个具体实施例中,如图1、2所示,所述翻转机构包括连接臂6及两个伸缩部件7,两个伸缩部件7分别设置于连接臂6的上下两侧,所述伸缩部件7的固定端与连接臂6的相连,所述伸缩部件7的活动端与安装架5相连;所述连接臂6的两端分别与车体1的前端及安装架5的后端转动相连;两个伸缩部件7均与控制模块及中控台相连。其中,所述伸缩部件7为液压缸;所述翻转机构还包括旋转台8及用于驱动旋转台8及连接臂6转动
的旋转组件,所述旋转组件包括旋转部件一及旋转部件二,所述连接臂6的后端通过旋转部件一与旋转台8转动连接,所述旋转台8通过旋转部件二与车体1前端的安装座9转动配合,所述旋转部件一设置于旋转台8内,所述旋转部件二设置于安装座9内;所述旋转组件由控制模块及中控台控制。当执行搜索任务时,连接臂上方液压缸的活塞杆伸出、下方液压缸的活塞杆收缩,可使安装架从车体顶部抬起直立,并驱动连接臂旋转使安装架接近地面,驱动旋转台旋转180
°
使探地雷达转至靠近地面一侧;同时,连接臂上方液压缸的活塞杆继续伸出、下方液压缸的活塞杆继续收缩,可使安装架与地面平行。反之,可使安装架反扣于车体顶部,并使探地雷达贴在车顶上,在方便运输的同时也能够避免在运输过程中磕碰探地雷达。
30.具体制作时,如图1所示,所述安装架5为矩形框架,包括四周边框51及顶部的多个并列支撑肋52,所述探地雷达2设置于左右两个边框51之间,所述支撑肋52的中间固定中间梁53,所述中间梁53的后端延伸至边框51外部、且与连接臂6转动连接。框架式结构的安装架可减轻其整体重量,携带、操作更轻便。同时,车体1为由方形铝制材料制作而成的空心壳体,可由空心方形铝制管材、铝型板等构成,车体由行走机构支撑,承载探地雷达等全车重量,利用铝制材料制作可降低整体重量,行走更轻便。
31.进一步优化上述技术方案,在车体上还设置机载成像系统,可采用机载激光成像系统、机载高光谱成像系统或机载光电/红外成像系统。通过机载成像系统可实现快速、高效地对作业地域进行探测,并将探测数据实时传输到控制指挥中心的中控台,主要用于搜寻裸露在地面上的未爆物。
32.为了保证工作人员的人身安全,所述中控台设置于运输车上,所述中控台包括显示屏及中控主机,形成一个控制指挥中心;所述探地雷达及控制模块均与中控台无线连接。通过运输车可方便随机更换工作地点,借助显示屏可直观观察车体上机载成像系统所捕捉到的周边环境,同时方便分析陀螺仪、位置传感器及探地雷达传回的数据;中控主机控制车体及探地雷达的动作及启停并接收回传信息,实时监测前方的探测情况,并对信息进行综合分析判断,为后续未爆弹的处置提供决策支持。
33.另外,报警机构通过发光元件和发声元件发出报警信号,报警机构可设置在车体或中控台,也可以在车体及中控台同时设置,方便及时提醒工作人员,便于工作人员标记危爆物的位置坐标信息。
34.本实用新型的使用过程如下:
35.探测车控制模块接收到中控台发出的开始探测指令后,控制模块发出指令到轮毂电机,轮毂电机工作,探测车开始移动。当探测车运动到待探测区域后,控制模块发出指令到翻转机构,翻转机构动作,使得探地雷达基本与地面平行,然后探地雷达开始工作。同时,陀螺仪、位置传感器实时探测路况信息,控制模块综合陀螺仪状态以及传感器回传数据,判断路况并控制机械臂和轮毂电机动作,确保探测车平稳安全移动。当探测车沿沟壑行进时,控制模块通过控制机械臂和轮毂电机的动作,可实现一侧两个车轮在沟壑里通行,另两个机械臂伸长使车轮搭在沟沿上通行,而车身却能保持稳定。跨越沟壑时,两只前车轮先爬到沟沿上,而后一只后车轮也爬上沟沿,另一只后车轮的机械臂伸长,支撑探测车向上爬行,待车身大部分爬过沟沿后,最后一只机械臂可顺势爬上沟沿,实现轻松跨越沟壑。
36.在上面的描述中阐述了很多具体细节以便于充分理解本实用新型,但是本实用新
型还可以采用其他不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本实用新型内涵的情况下做类似推广,因此本实用新型不受上面公开的具体实施例的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1