一种具有激光雷达的物料运输装置的制作方法
1.本实用新型属于物料运输技术领域,尤其涉及一种具有激光雷达的物料运输装置。
背景技术:
2.agv小车也称自动引导车,其装有电磁或者光电等自动导引机构,能够沿着预设的行驶路径进行行驶的小车,agv自动引导车与料车配合并使料车沿着预设行驶路径行驶,以实现生产过程中半成品或成品物料运送、移载等。
3.经检索,中国专利号cn110596716b公开了一种agv激光雷达定位系统及方法,所述激光雷达定位系统包括反光膜组及agv。本发明还提供一种agv激光雷达定位方法,所述agv激光雷达定位方法应用于agv激光雷达定位装置,所述agv激光雷达定位方法通过激光雷达接收反光膜的反光信号;基于所述反光信号的信号强度值进行直线拟合,以所述直线拟合的拟合结果计算所述反光膜在激光雷达坐标系下的方向坐标;根据计算到的所述方向坐标确认agv在反光膜坐标系下的坐标。本发明以反光强度递增/递减的形式布置反光膜组,并将已布置的反光膜组设置在agv站台工作,以激光雷达接收反光膜组反射的反光信号强度计算agv的位置坐标,无需设置高成本的辅助定位装置,并实现了提高agv定位精确度的有益效果。
4.上述专利提供了一种便于定位的方法,但是在实际的使用过程中,若是反光膜上覆盖有灰尘,将会导致多个反光膜实际的反光强度可能不会出现递增/递减的形式,导致实际的定位将会出现偏差。
5.为此,我们提出来一种具有激光雷达的物料运输装置解决上述问题。
技术实现要素:
6.针对上述问题,本实用新型提供一种具有激光雷达的物料运输装置,其能够实现对于识别板进行自动清洁,以确保自动引导车定位准备,以解决上述背景技术中提出的问题。
7.为了实现上述目的,本实用新型采用了如下技术方案:
8.一种具有激光雷达的物料运输装置,包括自动引导车以及与自动引导车相配合的料车,所述自动引导车上设有激光雷达组件;
9.所述料车包括车体,所述车体底端滑动连接有可与激光雷达组件相配合的识别板,所述车体底端设有移动腔,所述移动腔内部滑动连接有滑动板,所述滑动板顶端通过弹性连接件与移动腔顶壁相连接;所述滑动板与识别板之间设有连接机构。
10.进一步的,所述识别板包括多个识别条,且多个识别条表面均覆盖有反光膜。
11.进一步的,多个所述识别条上的反光膜反光强度由识别板中部向两侧逐渐变化设置。
12.进一步的,所述自动引导车顶端通过液压缸连接有支撑板,所述支撑板顶端固定
连接有多个支撑柱。
13.进一步的,所述连接机构包括滑动腔、限位板以及连接条,所述滑动腔开设在车体底端,所述限位板滑动连接在滑动腔内部,所述识别板顶端延伸至滑动腔内部,并且与限位板固定连接,所述滑动腔与移动腔连通设置,所述限位板与滑动板之间通过连接条固定连接。
14.进一步的,所述滑动腔被识别板贯穿处设有清洁条,所述清洁条与识别板相抵设置。
15.进一步的,所述弹性连接件包括多个弹簧以及限位柱,所述弹簧上下两端分别与移动腔顶壁以及滑动板固定连接,所述限位柱固定连接在移动腔顶壁。
16.与现有技术相比,本实用新型的有益效果为:
17.本实用新型通过设置滑动板、连接机构以及识别板等结构,能够实现当自动引导车对于料车进行抬升的过程中,识别板将会自动缩回至滑动腔内部,并且通过清洁条与识别板之间的摩擦作用实现对于识别板的清洁,避免识别板上灰尘堆积导致的识别板上各个识别条之间的反光强度不明显,导致自动引导车定位不明显等情况发生。
附图说明
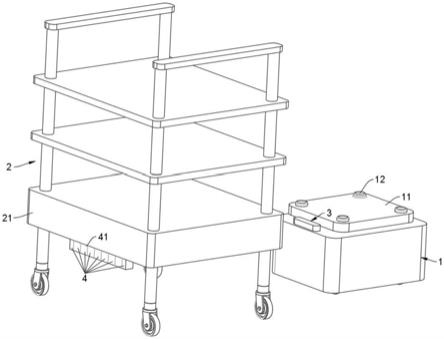
18.图1为本实用新型提出的一种具有激光雷达的物料运输装置的整体结构示意图;
19.图2为本实用新型提出的一种具有激光雷达的物料运输装置只能够料车结构示意图;
20.图3为图2中a处放大结构示意图。
21.图中:1、自动引导车;11、支撑板;12、支撑柱;2、料车;21、车体;3、激光雷达组件;4、识别板;41、识别条;5、移动腔;6、滑动板;7、弹性连接件;71、弹簧;72、限位柱;8、连接机构;81、滑动腔;82、限位板;83、连接条;9、清洁条。
具体实施方式
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
23.在本实用新型的描述中,需要理解的是,术语"中心"、"纵向"、"横向"、"长度"、"宽度"、"厚度"、"上"、"下"、"前"、"后"、"左"、"右"、"坚直"、"水平"、"顶"、"底"、"内"、"外"、"顺时针"、"逆时针"等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
24.参照图1-3,一种具有激光雷达的物料运输装置,包括自动引导车1以及与自动引导车1相配合的料车2,自动引导车1上设有激光雷达组件3,用于发射以及检测激光信号。
25.料车2包括车体21,车体21底端滑动连接有可与激光雷达组件3相配合的识别板4,识别板4包括多个识别条41,且多个识别条41表面均覆盖有反光膜。
26.且多个识别条41上的反光膜反光强度由识别板4中部向两侧逐渐变化设置,如向两侧递增或者递减设置。
27.当自动引导车1上上的激光雷达组件3发出的激光束照射在识别板4上后,并且通过识别板4上的反射的信号可实现自动定位(更具体的定位方式对比文件已作出公开叙述)。
28.自动引导车1内部设有控制自动引导车1移动的移动机构,具体移动机构为本领域公开技术,此处不再详细叙述。自动引导车1顶端通过液压缸连接有支撑板11,支撑板11顶端固定连接有多个支撑柱12,自动引导车1移动至料车2底端之后,可通过液压缸带动支撑板11向上移动,实现支撑板11以及支撑柱12对于料车2进行抬升,继而实现通过自动引导车1带动料车2移动。
29.车体21底端设有移动腔5,移动腔5内部滑动连接有滑动板6,滑动板6顶端通过弹性连接件7与移动腔5顶壁相连接。
30.弹性连接件7包括多个弹簧71以及限位柱72,弹簧71上下两端分别与移动腔5顶壁以及滑动板6固定连接,限位柱72固定连接在移动腔5顶壁,弹簧71同于滑动板6的复位,限位柱72用于对滑动板6进行限位。
31.滑动板6与识别板4之间设有连接机构8,连接机构8包括滑动腔81、限位板82以及连接条83,滑动腔81开设在车体21底端,限位板82滑动连接在滑动腔81内部,识别板4顶端延伸至滑动腔81内部,并且与限位板82固定连接,滑动腔81与移动腔5连通设置,限位板82与滑动板6之间通过连接条83固定连接。
32.当自动引导车1对于料车2进行抬升时,此时的支撑柱12将会与滑动板6相配合,并且实现此时的弹簧71将会被压缩,滑动板6相对于料车2将会向上移动,进而实现滑动板6通过连接条83带动识别板4相对于料车2向上移动,实现识别板4移动至滑动腔81内部,进而实现识别板4被滑动腔81底壁多清洁,并且可将结构进一步优化为:滑动腔81被识别板4贯穿处设有清洁条9,清洁条9与识别板4相抵设置,实现识别板4移动至滑动腔81内部时将会被清洁条9进行清洁。
33.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1