一种两轮双陀螺仪自平衡电动车的制作方法
1.本实用新型涉及平衡电动车技术领域,尤其是一种两轮双陀螺仪自平衡电动车。
背景技术:
2.当前大城市道路拥堵严重,停车位难找。电动车保持两个车轮的结构,结构简单,体积小,可以保证电动车在堵车的情况下迅速从车辆中的夹缝中穿行,保证制动灵活。另外,由于两个车轮的电动车占地面积小,从占有空间看,一辆电动自行车占有的空间只有一般私家车的二十分之一。对停车位置要求不高,停车容易,不会占用过多的公共资源,社会公共管理成本低,同时用户体验度也较高,因此两轮电动车逐步发展起来。
3.两轮车辆只有前后两个车轮构成,属于强耦合、欠驱动、非线性、侧向不稳定系统。电动车在驾驶过程中,如果被其他障碍物(例如其他电动车、汽车或树桩)侧撞将要侧翻时,无法恢复自平衡,容易发生交通事故。因此关于两轮车辆的平衡问题,是两轮车辆首要解决的问题。即要保证电动车在静止或运行状态的过程中受到外界扰动或撞击的条件下,仍能具有保持或恢复原来行驶状态的能力。
技术实现要素:
4.本发明人针对上述问题及技术需求,提出了一种两轮双陀螺仪自平衡电动车。实现电动车的静止平衡、运动平衡与受到扰动后的自平衡恢复,保障行车安全。
5.本实用新型的技术方案如下:
6.一种两轮双陀螺仪自平衡电动车,包括电动车本体和电源管理单元,其特征在于,还包括主控板、双陀螺仪机构、电机驱动单元和传感器检测单元;电源管理单元用于给电动车及各单元供电;双陀螺仪机构位于电动车脚踏板的下方,且相对于电动车本体纵向安置,双陀螺仪机构的重心位于前轮轴心和后轮轴心所在直线上,双陀螺仪机构包括第一、第二力矩陀螺仪转子,且第一力矩陀螺仪转子靠近前轮,第二力矩陀螺仪转子靠近后轮;电机驱动单元包括陀螺自转电机和陀螺进动电机,陀螺自转电机位于第一、第二力矩陀螺仪转子内部,用于驱动陀螺仪自转;传感器检测单元包括车身姿态检测传感器和陀螺进动角检测传感器,车身姿态检测传感器位于电动车本体轴线上,用于检测电动车横向摆动的角度与角速度,陀螺进动角检测传感器用于检测双陀螺仪机构的进动角与进动角速度;主控板分别连接电机驱动单元和传感器检测单元,用于控制陀螺进动电机使第一、第二力矩陀螺仪转子的翻转运动的进动角方向相反、大小相同。
7.其进一步的技术方案为,双陀螺仪机构还包括内、外框架、同步带及同步带偏转轴、第一、第二陀螺仪偏转轴,其中偏转轴均相对于电动车本体横向安置;同步带偏转轴位于外框架中部,第一、第二力矩陀螺仪转子分别位于内框架中,且对称分布在同步带偏转轴两侧,第一陀螺仪偏转轴贯穿第一力矩陀螺仪转子中心,且两端分别连接在外框架上,第二陀螺仪偏转轴贯穿第二力矩陀螺仪转子中心,且两端分别连接在外框架上;第一同步带一端套在第一陀螺仪偏转轴一端,另一端套在同步带偏转轴的第一端,第二同步带一端套在
第二陀螺仪偏转轴一端,另一端套在同步带偏转轴的第二端;
8.陀螺进动角检测传感器位于第一或第二陀螺仪偏转轴上;陀螺进动电机位于同步带偏转轴上,用于通过驱动同步带偏转轴来带动第一、第二陀螺仪偏转轴。
9.其进一步的技术方案为,电机驱动单元还包括前轮转向舵机,前轮转向舵机与电动车车把转向轴通过同步带连接,用于控制电动车车把的转向角与转向角速度;传感器检测单元还包括位于电动车车把上的转向角检测传感器,转向角检测传感器用于检测电动车车把的转向角与转向角速度。
10.其进一步的技术方案为,电机驱动单元还包括后轮前进驱动电机,后轮前进驱动电机的传动轴与后轮轴线同轴,用于控制后轮的前进速度与启停;传感器检测单元还包括位于电动车后方的前进速度检测传感器,前进速度检测传感器用于检测电动车本体的前进速度。
11.其进一步的技术方案为,电机驱动单元还包括电子调速计,电子调速计分别与主控板和陀螺自转电机相连,用于控制陀螺自转电机转到特定速度。
12.其进一步的技术方案为,电机驱动单元还包括边撑腿收放舵机,用于控制边撑腿的收起与下方。
13.其进一步的技术方案为,还包括上位机,上位机与主控板无线连接,用于实现人机交互。
14.其进一步的技术方案为,陀螺自转电机为无刷直流电机。
15.本实用新型的有益技术效果是:
16.通过在电动车本体中设置双陀螺仪机构,当电动车受到横向撞击产生倾斜时,车身姿态检测传感器会检测到车体横向摆动的角度与角速度超出正常范围,将车体姿态信息传递给主控板,主控板根据陀螺效应原理给陀螺进动电机下发指令,使第一、第二力矩陀螺仪转子的进动角速度发生变化,进而产生修正陀螺力矩来抵消外力,使车体回到平衡位置,避免车体及驾驶人员受到二次伤害,保障驾驶员的安全;
17.进一步的,双陀螺仪机构与车身姿态检测传感器和边撑腿收放舵机之间配合,通过上位机实现自平衡电动车的自启动;双陀螺仪机构与转向角检测传感器、车身姿态检测传感器和边撑腿收放舵机之间配合,通过上位机还实现自平衡电动车的自停车,在复杂的交通环境下发挥两轮电动车的优势。
附图说明
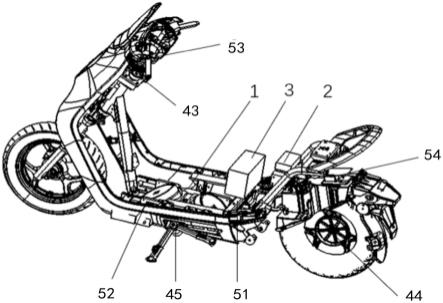
18.图1是本技术提供的两轮双陀螺仪自平衡电动车的结构示意图。
19.图2是本技术提供的双陀螺仪机构的结构示意图。
20.图3是本技术提供的两轮双陀螺仪自平衡电动车的电气示意图。
具体实施方式
21.下面结合附图对本实用新型的具体实施方式做进一步说明。
22.如图1所示,本实施例提供了一种两轮双陀螺仪自平衡电动车,包括电动车本体、双陀螺仪机构1、主控板2、电源管理单元3、电机驱动单元和传感器检测单元。可选的,还包括与主控板2无线连接的上位机。
23.双陀螺仪机构1位于电动车脚踏板的下方,且相对于电动车本体纵向安置,双陀螺仪机构1的重心位于前轮轴心和后轮轴心所在直线上。具体的,如图2所示,双陀螺仪机构1包括第一力矩陀螺仪转子11、第二力矩陀螺仪转子12、外框架13、内框架14、第一同步带15、第二同步带16及同步带偏转轴17、第一陀螺仪偏转轴18和第二陀螺仪偏转轴19。其中:第一力矩陀螺仪转子11靠近前轮,第二力矩陀螺仪转子12靠近后轮。偏转轴17-19均相对于电动车本体横向安置,同步带偏转轴17位于外框架13中部,第一、第二力矩陀螺仪转子11、12分别位于内框架14中,且对称分布在同步带偏转轴17两侧。第一陀螺仪偏转轴18贯穿第一力矩陀螺仪转子11中心,且两端分别连接在外框架13上,第二陀螺仪偏转轴19贯穿第二力矩陀螺仪转子12中心,且两端分别连接在外框架13上。第一同步带15一端套在第一陀螺仪偏转轴18一端,另一端套在同步带偏转轴17的第一端,第二同步带16一端套在第二陀螺仪偏转轴19一端,另一端套在同步带偏转轴17的第二端,也即第一、第二同步带15、16沿同步带偏转轴17的中心点呈中心对称分布。
24.主控板2位于电动车车座下方,分别与电机驱动单元中的各个电机的驱动器以及传感器检测单元中的各个传感器相连,用于驱动电机、采集传感器数据。可选的,如图3所示,主控板2包括微处理器、存储区域工作指示灯、双电源系统模块以及通信接口。由于本实施例采用的主控板2为现有模组,在此不详细赘述其内部电路结构。
25.结合图1-图3所示,电机驱动单元包括陀螺自转电机41、陀螺进动电机42、前轮转向舵机43、后轮前进驱动电机44、电子调速计和边撑腿收放舵机45。其中:陀螺自转电机41位于第一、第二力矩陀螺仪转子11、12内部,用于提供自转速度、驱动陀螺仪自转。可选的,本实施例采用的陀螺自转电机41为无刷直流电机。陀螺进动电机42位于同步带偏转轴17上,用于驱动同步带偏转轴17转动,进而通过第一、第二同步带15、16来带动第一、第二陀螺仪偏转轴18、19转动,以实现控制第一、第二力矩陀螺仪转子11、12的进动角与进动角速度。前轮转向舵机43与电动车车把转向轴通过同步带连接,用于控制电动车车把的转向角与转向角速度。后轮前进驱动电机44的传动轴与后轮轴线同轴,用于控制后轮的前进速度与启停。可选的,本实施例采用的后轮前进驱动电机44为轮毂电机。电子调速计分别与主控板2和陀螺自转电机41相连,用于控制陀螺自转电机41转到特定速度。边撑腿收放舵机45用于控制边撑腿的收起与下方,为实现自平衡电动车的自启动与自停车做准备。
26.结合图1-图3所示,传感器检测单元包括车身姿态检测传感器51、陀螺进动角检测传感器52、转向角检测传感器53和前进速度检测传感器54。其中,车身姿态检测传感器51位于电动车本体轴线上,用于检测电动车横向摆动的角度与角速度。陀螺进动角检测传感器52位于第一或第二陀螺仪偏转轴18或19上,用于检测双陀螺仪机构的进动角与进动角速度。转向角检测传感器53位于电动车车把上,用于检测电动车车把的转向角与转向角速度。前进速度检测传感器54位于电动车后方,用于检测电动车本体的前进速度。
27.电源管理单元3用于给电动车及各单元供电。
28.上位机用于控制指令的下发与数据的接收,实现人机交互。可选的,本实施例的上位机为pc或手机。
29.上述两轮双陀螺仪自平衡电动车实现自平衡的原理基于陀螺效应,当第一、第二力矩陀螺仪转子11、12处于高速旋转状态时,双陀螺仪机构1的外框架13受到外力作用,会使内框架14随着外框架13一起向外力的作用方向运动,此时陀螺转子及内框架14将绕内框
架14与外框架13连接的相应陀螺仪偏转轴转动,从而产生陀螺力矩来抵抗外力,且通过设计第一、第二同步带15、16保证第一力矩陀螺仪转子11与第二力矩陀螺仪转子12翻转运动的进动角的同步性。因此当电动车受到横向的冲击力使其倾斜时,主控板2采集车身姿态检测传感器51检测的车身倾角,控制陀螺进动电机42驱动双陀螺仪绕其偏转轴进动,使第一、第二力矩陀螺仪转子11、12的翻转运动的进动角方向相反、大小相同,从而产生陀螺力矩维持电动车的平衡,在此过程中利用陀螺进动角检测传感器52实时检测进度角度直至达到平衡状态,避免车体及驾驶人员受到二次伤害,保障驾驶员的安全。
30.需要说明的是,本实施例采用本领域中集成现有的基于陀螺效应平衡控制的主控板2,来搭建两轮双陀螺仪自平衡电动车。
31.可选的,本实施例提供的两轮双陀螺仪自平衡电动车还可以通过上位机下发启动指令或停车指令实现自启动和自停车功能。当需要电动车自启动时,主控板2控制双陀螺仪机构1自转使电动车立起来,当车身倾角在平衡范围内控制边撑腿收放舵机45收起边撑腿,完成自启动。当需要电动车自停车时,主控板2控制前轮转向舵机43转向边撑腿方向预定角度,当转向角度在不平衡范围内控制双陀螺仪机构1停止自转并控制边撑腿收放舵机45放下边撑腿,完成自停车。上述功能使两轮电动车在复杂的交通环境下发挥其自身优势。
32.以上所述的仅是本技术的优选实施方式,本实用新型不限于以上实施例。可以理解,本领域技术人员在不脱离本实用新型的精神和构思的前提下直接导出或联想到的其他改进和变化,均应认为包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1