一种基于AI技术的手部轨迹暴力检测安防小车
一种基于ai技术的手部轨迹暴力检测安防小车
技术领域
1.本实用新型涉及智能小车领域,具体涉及一种基于ai技术的手部轨迹暴力检测安防小车。
背景技术:
2.随着监控技术的发展,以监控摄像头为主的监控设备广泛分布在各个公共场所,针对可能发生的暴力行为而诞生的暴力行为检测系统也逐渐完善,但是现有的暴力行为检测方式大多依赖固定摄像头,监控范围缺乏全面性、观察角度缺乏灵活性、检测设备缺乏机动性、检测算法缺乏鲁棒性。
技术实现要素:
3.本实用新型提出了一种基于ai技术的手部轨迹暴力检测安防小车,解决了现有固定摄像头的监控范围缺乏全面性、观察角度缺乏灵活性、检测设备缺乏机动性、检测算法缺乏鲁棒性。
4.一种基于ai技术的手部轨迹暴力检测安防小车,包括车舱,进一步的,所述车舱包括监控模块、探测模块、报警模块以及驱动模块,所述车舱内可拆卸连接有放置槽,所述放置槽内设有为监控模块、探测模块、报警模块以及驱动模块供电的蓄电池,所述车舱的顶部设有顶板,所述顶板的上表面设有向上凸起的主板舱,所述主板舱位于小车后部,所述主板舱内设有用于数据处理的主板,所述主板与监控模块、探测模块、报警模块以及驱动模块均相连,所述监控模块包括位于所述顶板的上表面且的舵机云台,所述舵机云台位于小车的前部,所述舵机云台的顶部设有用于检测人物手部运动的深度摄像头。
5.进一步的,所述探测模块包括设置在所述主板舱顶部的旋转舵机,所述旋转舵机顶部设有用于探测小车周围环境信息的激光雷达。
6.进一步的,所述报警模块包括设在所述顶板上表面的警示灯以及用于向监控人员终端收发信号的天线,所述报警模块还包括用于发出警报声的喇叭,所述天线与所述主板连接,所述天线还与监控人员终端网络连接。
7.进一步的,所述驱动模块包括plc控制器和设在所述车舱左、右两侧的车轮,所述车舱的左、右两侧均设有至少两个车轮,每个所述车轮均连接有驱动所述车轮的电机,所述电机与所述蓄电池相连,所述电机还与所述plc控制器相连。
8.进一步的,所述车舱侧壁设有用于将所述放置槽取出的舱门。
9.本实用新型的有益效果在于,通过探测模块与驱动模块实现小车自动巡航,拥有所述舵机云台搭载的所述深度摄像头,所述舵机云台可实现水平方向360
°
转动、上下方向120
°
转动,可通过转动所述舵机云台以扩大检测视野、可区分前景和后景、可对目标图像进行标记、分割、识别与追踪、可有效针对复杂物体进行姿态判断,基于alphapose,利用pytorch 深度学习框架,能够计算人体手部运动轨迹,分析混乱度,实现暴力行为检测;在检测到暴力行为时,通过报警模块重复对施暴者发出警告并同时向监管人员终端发送警
报,本实用新型适用于商场、展厅、机场、车站等具有人流量大和大面积平整地面的场所。
附图说明
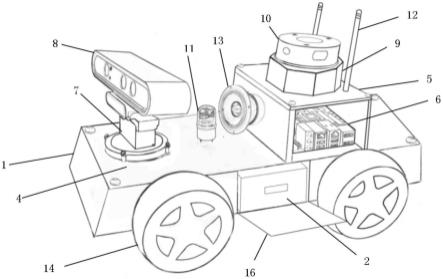
10.图1为本实用新型的三维结构示意图;
11.图2为本实用新型的车舱透视图;
12.图中:1-车舱;2-放置槽;3-蓄电池;4-顶板;5-主板舱;6-主板;7-舵机云台;8
‑ꢀ
深度摄像头;9-旋转舵机;10-激光雷达;11-警示灯;12-天线;13-喇叭;14-车轮;15
‑ꢀ
电机;16-舱门。
具体实施方式
13.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
14.如图1-2所示的一种基于ai技术的手部轨迹暴力检测安防小车,包括车舱1,其特征在于,所述车舱1包括监控模块、探测模块、报警模块以及驱动模块,所述车舱1内可拆卸连接有放置槽2,所述放置槽2内设有为监控模块、探测模块、报警模块以及驱动模块供电的蓄电池3,所述车舱1的顶部设有顶板4,所述顶板4的上表面设有向上凸起的主板舱 5,所述主板舱5位于小车后部,所述主板舱5内设有用于数据处理的主板6,所述主板6 与监控模块、探测模块、报警模块以及驱动模块均相连,所述监控模块包括位于所述顶板4 的上表面的舵机云台7,所述舵机云台7位于小车的前部,所述舵机云台7的顶部设有用于检测人物手部运动的深度摄像头8。蓄电池3可采用容量大、易维护且价格便宜的铅蓄电池,深度摄像头8可采用intel realsense d455实感深度摄像头,主板6可采用robomaster 开发板c型,舵机云台7可采用fashionstar的openmv二维自由度舵机云台,将已编程好的主板6安装在小车上,通过远程终端启动小车,然后通过舵机云台7带动深度摄像头8 进行水平方向360
°
转动、上下方向120
°
转动并实时的监控拍摄小车移动过程中的实时图像状况,同时将图像上传至主板6,由其对上传的图像进行分析,检测是否发生暴力行为。
15.作为优选的,所述探测模块包括设置在所述主板舱5顶部的旋转舵机9,所述旋转舵机 9顶部设有用于探测小车周围环境信息的激光雷达10。旋转舵机9可采用ds04-nfc*360度连续旋转舵机,激光雷达10可采用思岚rplidar a2激光雷达,旋转舵机9带动激光雷达 10高速旋转并发出激光雷达信号,通过主板6的数据处理建立出小车所处环境的3d模型,小车根据预定路线和环境模型进行自动巡航。
16.作为优选的,报警模块与监控人员终端网络连接,报警模块包括设在顶板4上表面的警示灯11以及用于向监控人员终端收发信号的天线12,报警模块还包括用于发出警报声的喇叭13,所述天线12与所述主板6连接,所述天线12还与监控人员终端网络连接。若发生暴力行为则立即将数据传输到监控人员终端,同时警示灯11连续闪烁、喇叭13重复播放警示语,监控人员将对上传的数据以及监控影像做出分析与处理。
17.作为优选的,驱动模块包括plc控制器,驱动模块还包括设在车舱1左、右两侧的车轮14,车舱1的左、右两侧均设有至少两个车轮14,每个车轮14对应设有一个驱动车轮 14的电机15,所述电机15与所述蓄电池3相连,所述电机15还与所述plc控制器相连。通过plc控
制器来控制电机15分别驱动对应的车轮14转动,使其获得多轮驱动的优势。
18.作为优选的,车舱1侧壁设有用于将放置槽2取出的舱门16。方便将放置槽2取出,然后对蓄电池3进行充电或更换。
19.其中,基于alphapose,利用pytorch深度学习框架,为小车及时准确检测暴力行为奠定坚实基础,提供了一种暴力行为检测算法,其步骤为:
20.第一步:利用深度摄像头8采集数据;
21.第二步:利用alphapose提取手部的运动速度、运动频率以及运动范围等信息;
22.第三步:与设定的安全范围内的手部运动速度、运动频率以及运动范围相比较,如果人物的手部运动速度、运动频率以及运动范围超出安全范围,则判断发生了暴力事件。
23.其中,提供了一种自动巡航的方法,其步骤为:
24.第一步:利用激光雷达10采集小车周围的路径以及障碍物信息;
25.第二部:通过主板6的数据处理建立出小车所处环境的3d模型;
26.第三步:实现自动巡航。
27.本实用新型的具体实施方式在于,首先将已编程好的主板6安装在小车上,通过远程终端启动,旋转舵机9带动激光雷达10高速旋转并发出激光雷达信号,通过主板6的数据处理建立出小车所处环境的3d模型,小车根据预定路线和环境模型进行自动巡航,也可通过手机或pc端网页使用通过python语言开发的控制系统进行操控,深度摄像头8进行水平方向360
°
转动、上下方向120
°
转动并实时的监控拍摄小车移动过程中的实时图像状况,同时将图像上传至主板6,由其对上传的图像进行分析,检测是否发生暴力行为,天线12 用于信号收发,若发生暴力行为则立即将数据传输到监控人员终端,同时警示灯11连续闪烁、喇叭13重复播放警示语,监控人员将对上传的数据以及监控影像做出分析与处理。
28.最后说明的是,以上实施例仅用以说明本实用新型的技术方案而非限制,尽管参照较佳实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解,可以对本实用新型的技术方案进行修改或者等同替换,而不脱离本实用新型技术方案的宗旨和范围,其均应涵盖在本实用新型的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1