一种高通用性的汽车搬运机器人的制作方法
1.本实用新型涉及自动化机械设备领域,具体涉及汽车搬运的零部件设计。
背景技术:
2.随着机械自动设备的智能化普及,越来越多的传统工序从人工操作变为机械化操作。其中,汽车作为大型部件,在生产、加工、物流、维修、智能停车过程中需要进行搬运移动,往往采用自动化搬运设备,如搬运机器人进行操作。
3.为了在搬运过程中对车身做到零损伤零变形,往往搬运机器人与汽车的接触点为汽车轮胎,此时就需要使用到轮胎夹持臂或轮胎支撑臂等部件。
4.如公开号为cn113605766a的中国专利文件公开了一种搬运机器人,其在限位叉臂上安装了货叉,机器人的机甲上安装有行走轮这样的行走装置,货叉侧向靠近车体,一前一后夹持轮胎,从而达到对车辆接触,移动车辆的技术效果。
5.然而,该种技术方案存在一定的缺陷,在实际使用中,搬运机器人面对不同品牌不同类型的汽车,而汽车的型号不同,轴距自然也就不同,即车辆前轮到后轮之间的距离不同。而该种搬运机器人在面对不同轴距的汽车搬运任务时,通用性不好。
技术实现要素:
6.本实用新型的目的是提供一种高通用性的汽车搬运机器人,面对不同轴距的汽车的搬运任务无需更换搬运机器人,能通过自身结构改变来满足车辆尺寸要求,适用性强。
7.一种高通用性的汽车搬运机器人,包含搬运机器人一、搬运机器人二和用于连接两者的连接总成;
8.所述连接总成包含分别安装在所述搬运机器人一和所述搬运机器人二的连接座一和连接座二,所述连接座一和所述连接座二分别活动连接有连接臂一和连接臂二,所述连接臂一和所述连接臂二转动连接。
9.作为本实用新型的优选,所述连接臂一和所述连接臂二之间还安装有关节轴承。
10.作为本实用新型的优选,所述连接臂二上开设有接轴孔,所述关节轴承包含用于插入所述接轴孔的对接轴。
11.作为本实用新型的优选,所述关节轴承和所述连接臂一之间安装有隔套。
12.作为本实用新型的优选,所述连接臂一和所述连接臂二为框型结构,其中均由供线缆安置的空间,所述连接臂一和所述连接臂二上开设有供线缆穿过的过线孔。
13.作为本实用新型的优选, 所述连接座一包括与所述搬运机器人一固定安装的贴合板和与所述贴合板连接的安装筒,所述连接臂一还包含插入所述安装筒的入筒轴,所述入筒轴在竖直方向延伸。
14.作为本实用新型的优选,所述入筒轴和所述安装筒之间安装有耐磨轴套。
15.作为本实用新型的优选,还包含用于测量所述搬运机器人一和所述搬运机器人二之间距离的测距装置。
16.作为本实用新型的优选,所述搬运机器人一和所述搬运机器人二均在预设轨道上直线行驶,所述测距装置为用于测量所述连接臂一或所述连接臂二摆动角度的角度传感器。
17.作为本实用新型的优选,所述搬运机器人一或搬运机器人二均包含车架和安装在所述车架上的驱动轮套件,还包含行走驱动装置,所述驱动轮套件为两套,分布在所述车架的宽度方向的两侧,每套所述驱动轮套件均包含驱动轮一和驱动轮二,所述行走驱动装置驱动所述驱动轮一和所述驱动轮二旋转,所述驱动轮一和所述驱动轮二的行驶方向为所述车架的长度方向,所述驱动轮一和所述驱动轮二的布置方向也为所述车架的长度方向。
18.作为本实用新型的优选,所述驱动轮一和所述驱动轮二分别连接有轴一和轴二,所述轴一和轴二之间通过同步链连接传动,所述行走驱动装置驱动所述轴一旋转。
19.作为本实用新型的优选,所述行走驱动装置包含行走电机和与所述行走电机的动力输出端连接的主传动链,所述主传动链与所述轴一传动连接。
20.作为本实用新型的优选,两个所述轴一之间通过联轴器连接。
21.作为本实用新型的优选,所述车架上还安装有从动轮套件,所述从动轮套件安装在所述车架上长度方向一侧,所述驱动轮套件安装在所述车架上长度方向另一侧。
22.作为本实用新型的优选,所述车架上安装有触碰气囊。
23.作为本实用新型的优选,所述触碰气囊安装在所述车架长度方向上的一端。
24.作为本实用新型的优选,所述触碰气囊的延伸方向为斜上方延伸,且所述触碰气囊在高度方向上高于所述车架的高度,在所述驱动轮套件的行驶前后方向上更靠前于所述车架。
25.作为本实用新型的优选,所述触碰气囊内安装有压力波传感器,所述压力波传感器与所述行走驱动装置通信连接。
26.综上所述,本实用新型具有如下有益效果:
27.1、高通用性的汽车搬运机器人包含两个结构相同的机器人,分别负责对前轮的固定和后轮的固定,两个机器人之间依靠连接总成连接,连接总成的总延伸长度灵活可调,从而满足不同轴距的汽车的需求。
28.2、两个连接臂之间通过关节轴承连接,来缓冲和吸收行驶过程中受到的竖直方向的力,避免两个连接臂受到刚性冲击。
29.3、入筒轴和安装筒之间安装有耐磨轴套,如铜材料的耐磨轴套,使得这两个相对转动的部件拥有更好的耐磨效果更长的使用寿命。
30.4、测距装置用于测量两个机器人之间的距离,提升控制过程的自动化和智能化。
31.5、每套驱动轮套件均为“双轮配合,前后排布”的方式设计。在机器人前进或后退的过程中,无论是哪个驱动轮遇到了导轨缝隙出现了悬空的情况,另一个驱动轮依然存在动力,使得机器人可以继续行驶。
32.6、两套驱动轮套件从同一个行走电机处获得动力,同步性好。
33.7、车辆底盘若过低,会先触碰到软性的触碰气囊,压力波传感器出信号,行走电机停止运行,整个机器人停止前进,保护车辆底盘。
34.附图说明:
35.图1是实施例1的示意图;
36.图2是连接臂一和连接座一的安装示意图;
37.图3是连接臂一和连接臂二的安装示意图;
38.图4是测距装置的安装示意图;
39.图5是搬运机器人一或搬运机器人二的示意图;
40.图6是图5的右侧零部件的放大示意图;
41.图7是图5的侧视图;
42.图8是图7中的a处细节放大图。
43.图中:
44.3、车架,61、驱动轮套件,611、驱动轮一,612、驱动轮二,613、轴一,614、轴二,615、同步链,62、行走驱动装置,621、行走电机,622、主传动链,63、从动轮套件,64、触碰气囊,65、联轴器,71、连接座一、711、贴合板,712、安装筒,72、连接臂一,723、入筒轴, 73、连接臂二,731、臂体一,732、接轴孔,724、隔套,74、连接座二,75、测距装置,76、关节轴承,761、对接轴,91、搬运机器人一,92、搬运机器人二。
具体实施方式
45.以下结合附图对本实用新型作进一步详细说明。
46.本具体实施例仅仅是对本实用新型的解释,其并不是对本实用新型的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本实用新型的权利要求范围内都受到专利法的保护。
47.实施例1,一种高通用性的汽车搬运机器人,如图1所示,包含搬运机器人一91和搬运机器人二92,这两个机器人结构可完全一样,依靠行走装置在预设轨道内前后方向行驶,(轨道在图中未画出)机器人的具体结构下文详述。
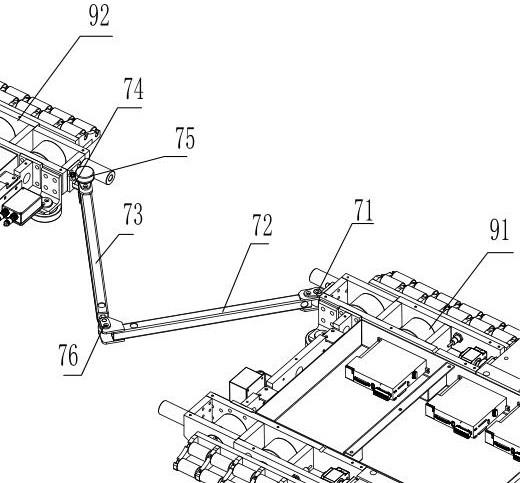
48.两个机器人之前使用连接总成来连接,具体的,在两个机器人上分别固定安装有连接座一71和连接座二74,而这两个连接座上又分别转动连接有连接臂一71和连接臂二73。两个连接座和两个连接臂无论是自身结构还是连接方式都可相同,下文以连接座一71和连接臂一72的连接方式为例进行解释。
49.如图2所示,贴合板711直接安装在搬运机器人一91的外壁上,安装筒712为筒状结构。入筒轴723穿过安装筒712,且与连接臂一72固定连接。入筒轴723在竖直方向延伸,至此,连接臂一72和连接座一71转动连接,在水平方向上旋转。入筒轴723和安装筒712之间安装有耐磨轴套,如铜材料的耐磨轴套,使得这两个相对转动的部件拥有更好的耐磨效果更长的使用寿命。
50.此外,连接臂一72和连接臂二73都为框型中空设计,其内部容腔可用于容纳两个机器人的电线。如图2所示,臂体一721上开设有过线孔722,供线缆进出。
51.如图3所示,连接臂一72和连接臂二73之间也采用转轴相互转动连接,使得两者在水平方向转动。进一步的,两者之间还使用关节轴承76连接,其包含有对接轴761,用于插入接轴孔732。关节轴承76直接采用销轴之类的部件与连接臂一72连接。这样的设置使得两个连接臂一方面可以打开收拢来调整两者间距。另一方面,两个机器人在行驶过程中遇到颠簸,两个连接臂会存在非水平方向的力,例如竖直方向的力。这个力会被关节轴承76来缓冲和吸收,避免两个连接臂受到刚性冲击。
52.为了适应不同轴距的车辆,测距装置75用于测量两个机器人之间的距离。测距装置75可采用现有技术中的距离传感设备,例如激光测距器。在本案中,由于两个机器人在预定轨道上前后移动,而两个连接臂的自身长度又是固定的,于是两个连接臂也是同步均匀打开。在这种情况下,本实施例的测距装置75采用角度传感器,通过测量连接臂一72相对连接座一71的转动角度,或通过测量连接臂二73相对连接座二74的转动角度,或通过两个连接臂的相对转动角度,结合连接臂的长度,计算出两个机器人之间的间距。
53.如图4所示,本实施例中,测距装置75为角度传感器,安装在连接臂二73上,用于测量连接臂二73相对连接座二74的相对转动角度。
54.图5-图8是搬运机器人一91或搬运机器人二92的示意图,两个机器人结构相同。如图5所示,单个搬运机器人包含车架3,车架3可以为一个框型结构,大致呈矩形。在车架3的宽度方向的两侧设有用于夹持汽车车轮的夹持套件,且夹持套件在车架3的宽度方向上延伸。
55.在车架3上设有两套从动轮套件63和两套驱动轮套件61。从动轮套件63位于车架3长度方向一侧,驱动轮套件61位于车架3长度方向上的另一侧。前者不连接动力系统,后者则通过行走驱动装置62获得行走的驱动力。
56.如图6所示,行走电机621的动力输出端连接主传动链622。主传动链622套设在其中一个轴一613上。两套驱动轮套件61的两个轴一613之间通过联轴器65连接,至此,两套驱动轮套件61从同一个行走电机621处获得动力,同步性好。
57.每套驱动轮套件61均为“双轮配合,前后排布”的方式设计。包含驱动轮一611和驱动轮二612,在车架3的长度方向上排布,即轮子的行驶方向上排布。两个驱动轮分别连接有轴一613和轴二614,两个轴通过同步链615传动连接。同步链615可以为现有技术中的链条匹配链轮,或者是同步带形式。至此,行走电机621的动力就传动给了驱动轮一611和驱动轮二612。在机器人前进或后退的过程中,无论是哪个驱动轮遇到了导轨缝隙出现了悬空的情况,另一个驱动轮依然存在动力,使得机器人可以继续行驶。
58.如图7所示,在机器人的行驶方向,即车架3的长度方向,即图7中的左右方向,设有触碰气囊64。如图4所示,触碰气囊64向斜上方延伸,其高于车架3,也比车架3更为靠前。当车架3需要下潜进入到车辆的底盘下方时,若车辆底盘过低,会有触碰损伤的风险。此时车辆底盘会先触碰到软性的触碰气囊64,气囊体发生形变,内部气压变化。该气压变化被安装在气囊体内的压力波传感器捕捉到。压力波传感器与行走电机621通讯连接,行走电机621停止运行,使得整个机器人停止前进。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1