独立悬架式四轮四驱室外差速机器人底盘的制作方法
1.本实用新型涉及机器人底盘技术领域,更具体地说,涉及独立悬架式四轮四驱室外差速机器人底盘。
背景技术:
2.机器人底盘,在日常生活中常用于搭载环境采集器件以实现巡航、避障、导航等功能;根据不同的使用需求,机器人底盘的尺寸也多种多样。目前,许多机器人底盘是半封闭式的,也即机器人底盘的零部件处于暴露状态;在室外环境下,机器人底盘的防水及防尘性能差,杂质和水分很容易进到机器人底盘内部,导致零部件(如电子元器件和电池)的加速老化,使得机器人底盘整体的稳定性较差。
技术实现要素:
3.本实用新型要解决的技术问题在于,针对现有技术的上述缺陷,提供独立悬架式四轮四驱室外差速机器人底盘。
4.本实用新型解决其技术问题所采用的技术方案是:
5.构造独立悬架式四轮四驱室外差速机器人底盘,包括车架、两个前轮、两个后轮;其中:
6.所述独立悬架式四轮四驱室外差速机器人底盘还包括两组悬架,两组所述悬架分别对应两个所述前轮、两个所述后轮;所述车架包括骨架组件、安装在所述骨架组件上并围住所述骨架组件的围板组件;所述骨架组件和所述围板组件,二者配合围成车架的内部空间;所述悬架,或连接所述围板组件的外侧和所述前轮,或连接所述围板组件的外侧和所述后轮;所述车架的内部空间设置有驱动两个所述前轮和两个所述后轮转动的驱动组件;所述围板组件设置有第一避让槽,所述第一避让槽,或供所述驱动组件和所述前轮连接,或供所述驱动组件和所述后轮连接;所述第一避让槽与所述车架的内部空间连通。
7.优选的,所述悬架为独立悬架。
8.优选的,所述悬架包括两组第一子单元;两组所述第一子单元,或分别对应两个所述前轮,或分别对应两个所述后轮;
9.所述驱动组件包括分别对应两个所述前轮和两个所述后轮的四组第二子单元;所述第二子单元包括连接所述前轮或所述后轮的输出轴;所述第一子单元包括与所述围板组件的外侧固定的固定板、与所述输出轴转动连接且同轴转动的浮动板、夹在所述固定板和所述浮动板之间的上横臂、夹在所述固定板和所述浮动板之间的下横臂、减震器;所述上横臂的两端分别与所述固定板、所述浮动板转动连接;所述下横臂的两端分别与所述固定板、所述浮动板转动连接;所述减震器的一端与所述上横臂或所述下横臂转动连接,且另一端与所述围板组件的外侧转动连接。
10.优选的,所述第二子单元还包括提供动力的动力组件、将所述动力组件的动力向所述前轮或所述后轮传递的传递组件;
11.所述传递组件包括所述输出轴、夹在所述上横臂和所述下横臂之间的万向轴;所述万向轴的一端与所述动力组件连接并由其带动,所述万向轴的另一端与所述输出轴固定;
12.所述第一避让槽供所述动力组件与所述万向轴连接;所述固定板设置有避让所述万向轴的第二避让槽;所述浮动板设置有避让所述输出轴的第三避让槽;所述减震器与所述上横臂连接。
13.优选的,所述动力组件包括第一减速电机;所述第一减速电机的电机轴与所述万向轴固定。
14.优选的,所述动力组件包括第一同步轮、驱动所述第一同步轮转动的第二减速电机、与所述围板组件转动连接的第二同步轮、连接所述第一同步轮和所述第二同步轮的同步带;所述第二同步轮与所述万向轴同轴固定。
15.优选的,所述骨架组件包括两组横向单元和一组纵向单元;每组所述横向单元,均包括依次首尾相接的四根横向支撑杆;所述纵向单元包括分别对应所述横向单元的四个边角的四根纵向支撑杆;位于同一边角的两根所述横向支撑杆和一根所述纵向支撑杆,三者固定在一起;
16.所述围板组件包括分别盖住所述两组横向单元的上围板和下围板、围住四根所述纵向支撑杆的侧围板;所述上围板与位于较上方的所述横向单元固定;所述下围板与位于较下方的所述横向单元固定;两组所述横向单元,均与所述侧围板固定。
17.优选的,所述车架的内部空间还设置有电池;所述电池的两侧均设置有所述第二子单元。
18.优选的,所述车架的内部空间还设置有主控板;所述围板组件上还安装有位于所述主控板和所述电池之间的散热风扇。
19.本实用新型的有益效果在于:尽可能少地在围板组件上开孔/槽,以有效地将车架的内部空间与外界隔离开,使得在室内或室外环境下,都可以有效阻止杂质或水分进到机器人底盘内部,使得机器人底盘能够适应室内外的复杂环境,在防水防尘性能方面能够达到更高规格。
附图说明
20.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将结合附图及实施例对本实用新型作进一步说明,下面描述中的附图仅仅是本实用新型的部分实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他附图:
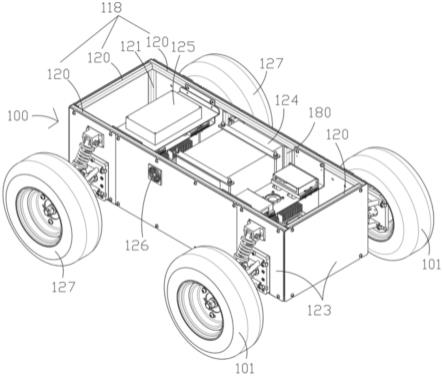
21.图1是本实用新型较佳实施例的独立悬架式四轮四驱室外差速机器人底盘的轴测图(上围板未示出);
22.图2是本实用新型较佳实施例的独立悬架式四轮四驱室外差速机器人底盘的俯视图(上围板未示出);
23.图3是本实用新型较佳实施例的独立悬架式四轮四驱室外差速机器人底盘中第一子单元的右视图;
24.图4是图3中a-a剖切图。
具体实施方式
25.为了使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例是本实用新型的部分实施例,而不是全部实施例。基于本实用新型的实施例,本领域普通技术人员在没有付出创造性劳动的前提下所获得的所有其他实施例,都属于本实用新型的保护范围。
26.本实用新型较佳实施例的独立悬架式四轮四驱室外差速机器人底盘如图1-图4所示,包括车架100、两个前轮101、两个后轮127;独立悬架式四轮四驱室外差速机器人底盘还包括两组悬架102,两组悬架102分别对应两个前轮101、两个后轮127;车架100包括骨架组件、安装在骨架组件上并围住骨架组件的围板组件;骨架组件和围板组件,二者配合围成车架的内部空间180;悬架102,或连接围板组件的外侧和前轮101,或连接围板组件的外侧和后轮127;车架的内部空间180设置有驱动两个前轮101和两个后轮127转动的驱动组件105;围板组件设置有第一避让槽(图中未示出),第一避让槽(图中未示出),或供驱动组件105和前轮101连接,或供驱动组件105和后轮127连接;第一避让槽(图中未示出)与车架的内部空间180连通。
27.本实施例提供的机器人底盘,属于全封闭式结构,具体表现为:围板组件将骨架组件围住,车架的内部空间180被围板组件所遮挡,使得安装在车架的内部空间180的零部件(如电子元器件和电池)处于被遮挡状态,不会直接暴露;同时,通过第一避让槽(图中未示出)保障驱动组件105和前轮101(或后轮127)的正常传动,悬架102也不穿入车架的内部空间180,而是仅与围板组件的外侧连接,减少在围板组件上开孔/槽。
28.本实施例提供的机器人底盘尽可能少地在围板组件上开孔/槽,以有效地将车架的内部空间180与外界隔离开,使得在室内或室外环境下,都可以有效阻止杂质或水分进到机器人底盘内部,使得机器人底盘能够适应室内外的复杂环境,在防水防尘性能方面能够达到更高规格。
29.如图1-图4所示,悬架102为独立悬架,独立悬架可以使得两个前轮101(或两个后轮127)之间不会相互影响,也即其中一个受到路面冲击而跳动时,不会影响另一个的运作,缓冲、减震效果更好,使得在运动的过程中机器人底盘运动性能更加稳定可靠,增加了机器人底盘在建模和导航时的精度。
30.如图1、图3及图4所示,悬架102包括两组第一子单元107;两组第一子单元107,或分别对应两个前轮101,或分别对应两个后轮127;
31.驱动组件105包括分别对应两个前轮101和两个后轮127的四组第二子单元108;第二子单元108包括连接前轮101或后轮127的输出轴109;第一子单元107包括与围板组件的外侧固定的固定板110、与输出轴109转动连接且同轴转动的浮动板111、夹在固定板110和浮动板111之间的上横臂112、夹在固定板110和浮动板111之间的下横臂113、减震器114;上横臂112的两端分别与固定板110、浮动板111转动连接;下横臂113的两端分别与固定板110、浮动板111转动连接;减震器114的一端与上横臂112或下横臂113转动连接,且另一端与围板组件的外侧转动连接。
32.具体的,将驱动组件105分成多个相互独立的第二子单元108,更便于将多个第二子单元108分散安装在车架的内部空间180,安装方便;第一子单元107为双横臂式独立悬架,该种悬架的减震器没有横向载荷,而且上端高度较低,有利于降低机器人底盘的高度,
具体工作过程为:机器人底盘行驶在路面不平整路段时,前轮101或后轮127、输出轴109和浮动板111会随路面上移或下移,输出轴109所受的压力会传递给上横臂112和下横臂113,又因为上横臂112和下横臂113为联动装置,上横臂112和下横臂113再将力传递给减震器114,减震器114将压力转换为弹性势能,后续再将弹性势能释放出来,从而达到减震的效果。
33.如图2-图4所示,第二子单元108还包括提供动力的动力组件115、将动力组件115的动力向前轮101或后轮127传递的传递组件116;
34.传递组件116包括输出轴109、夹在上横臂112和下横臂113之间的万向轴117;万向轴117的一端与动力组件115连接并由其带动,万向轴117的另一端与输出轴109固定;
35.第一避让槽(图中未示出)供动力组件115与万向轴117连接;固定板110设置有避让万向轴117的第二避让槽182;浮动板设置有避让输出轴的第三避让槽183;减震器114与上横臂112连接。
36.具体的,通过万向轴117传递动力,万向轴117有较大的角向补偿能力,结构紧凑,传动效率高,具体工作过程为:动力组件115输出动力,带动万向轴117的一端转动,万向轴117将动力传递至另一端(即与输出轴109固定的一端),进而带动输出轴109和与输出轴109固定的前轮101或后轮127转动;同时,上横臂112、万向轴117、下横臂113从上往下依次设置,且固定板110设置有第二避让槽182、浮动板111设置有第三避让槽183,有利于节省安装空间,使得整体结构更为紧凑。
37.如图2-图4所示,动力组件115包括第一减速电机;第一减速电机的电机轴与万向轴117固定。第一减速电机与围板组件固定;减速电机具有节省空间、可靠耐用、振动小的优点;同时,第一减速电机直接与万向轴117连接,减少了能量的损失,同时也提高了传动的精度。
38.作为替换方案的,动力组件115包括第一同步轮(图中未示出)、驱动第一同步轮(图中未示出)转动的第二减速电机(图中未示出)、与围板组件转动连接的第二同步轮(图中未示出)、连接第一同步轮(图中未示出)和第二同步轮(图中未示出)的同步带(图中未示出);第二同步轮(图中未示出)与万向轴同轴固定。具体的,第二减速电机带动第一同步轮(图中未示出)转动,进而通过同步带(图中未示出)带动第二同步轮(图中未示出)、万向轴转动,从而实现了动力的输出,采用电机及同步带轮结构,其运行平稳、噪音小、振动小。
39.如图1所示,骨架组件包括两组横向单元118和一组纵向单元;每组横向单元118,均包括依次首尾相接的四根横向支撑杆120;纵向单元包括分别对应横向单元118的四个边角的四根纵向支撑杆121;位于同一边角的两根横向支撑杆120和一根纵向支撑杆121,三者固定在一起;
40.围板组件包括分别盖住两组横向单元118的上围板(图中未示出)和下围板122、围住四根纵向支撑杆121的侧围板123;上围板(图中未示出)与位于较上方的横向单元118固定;下围板122与位于较下方的横向单元118固定;两组横向单元118,均与侧围板123固定。
41.采用上述骨架组件结构及围板组件结构,整体的结构简单、支撑强度好。
42.如图1-图2所示,车架的内部空间180还设置有电池124;电池124的两侧均设置有第二子单元108。使得机器人底盘的头部、中部、尾部都安装有较重的部件,整体受力趋于平衡,机器人底盘运行时更为平稳。
43.如图1所示,车架的内部空间180还设置有主控板125;围板组件上还安装有位于主控板125和电池124之间的散热风扇126,避免主控板125和电池124过热,保证其有更好的工作性能。
44.应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本实用新型所附权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1