基于5G的远程巡检无人车的制作方法
基于5g的远程巡检无人车
技术领域
1.本实用新型涉及无人车技术领域,更具体地说,涉及一种基于5g的远程巡检无人车。
背景技术:
2.随着人工智能的高速发展,巡检机器人已经被广泛应用于水电站、核电站、铁轨等危险区域的自主巡检,巡检机器人能够通过自带的激光雷达、超声波传感器等高精度传感器实现自主导航避障,配合机器人机身上的高清摄像头与后台系统,实现对不同场景的图像检测,实现无人巡检功能。然而,现有的无人巡检技术巡检范围有限,也无法将庞大的图像数据实时传输至后台系统,容易造成部分异常无法识别成功,后台的监视人员也无法及时对异常做出相应的处理。然而,现有的无人巡检机器人巡检范围有限,存在巡检盲区,且巡检过程中的图像信息无法及时传输给后台服务器,造成巡检异常无法及时识别,无法达到巡检的目的。
技术实现要素:
3.本实用新型要解决的技术问题在于,针对现有技术的上述缺陷,提出一种基于5g的远程巡检无人车。
4.本实用新型解决其技术问题所采用的技术方案是:提出一种基于5g的远程巡检无人车,包括车身和底盘,还包括:云台,所述云台设于车身上,所述云台包括:5g路由器和高清摄像头,所述高清摄像头与所述云台通讯连接,所述5g路由器用于将所述云台接收的数据传输给服务器;
5.移动模组,所述移动模组设于所述底盘上,所述移动模组用于控制所述车身的移动、暂停或者转向;
6.主控制器,所述主控制器设于所述底盘上,所述主控制器向所述移动模组发送控制信号,以控制所述移动模组的移动、暂停或者转向。
7.在一些实施例中,所述移动模组包括:车轮和差速电机;
8.所述车轮与所述差速电机同轴连接,所述差速电机与所述底盘连接;
9.所述差速电机与所述主控制器通讯连接,并根据所述主控制器的控制信号控制所述车轮的移动、暂停或者转向。
10.在一些实施例中,所述移动模组还包括:压力减震系统;
11.所述压力减震系统与所述差速电机相连,用于保护所述底盘。
12.在一些实施例中,本实用新型的基于5g的远程巡检无人车还包括:导航模组;
13.所述导航模组设于所述车身上;
14.所述导航模组包括:传感器系统和工控机,所述传感器系统用于监测周围障碍物,所述传感器系统与所述工控机通讯连接,并将监测到的障碍物数据信息传输给所述工控机;
15.所述工控机与所述主控制器通讯连接,并将接收到的所述障碍物数据信息处理分析后传输给所述主控制器。
16.在一些实施例中,所述传感器系统包括:深度摄像头、多线激光雷达和激光雷达;
17.所述激光雷达设于所述车身的前端和后端,并与所述工控机通讯连接;
18.所述深度摄像头设于所述车身的前端,并与所述工控机通讯连接;
19.所述多线激光雷达设于所述车身的前端,并与所述工控机通讯连接。
20.在一些实施例中,所述导航模组还包括:超声波传感器;
21.所述超声波传感器设于所述车身的四周,并与所述工控机通讯连接。
22.在一些实施例中,所述导航模组还包括:显示屏;
23.所述显示屏设于所述车身的后端,所述显示屏与所述工控机通讯连接,用于显示系统画面。
24.在一些实施例中,本实用新型的基于5g的远程巡检无人车还包括:照明灯;
25.所述照明灯设于所述底盘上。
26.在一些实施例中,本实用新型的基于5g的远程巡检无人车还包括:防撞条;
27.所述防撞条设于所述车身上,所述防撞条用于在所述车身与物体碰撞时保护所述车身。
28.在一些实施例中,所述云台还包括:旋转探照灯;
29.所述旋转探照灯设于所述云台的顶端,用于提高巡逻视线。
30.实施本实用新型的基于5g的远程巡检无人车具有以下有益效果:云台上安装四个高清摄像头,实现对四周物体无死角的监控,扩大巡检视野,云台内的5g路由器增加数据传输的带宽,实现对图像数据的实时传输,提高巡检效率。
附图说明
31.下面将结合附图及实施例对本实用新型作进一步说明,附图中:
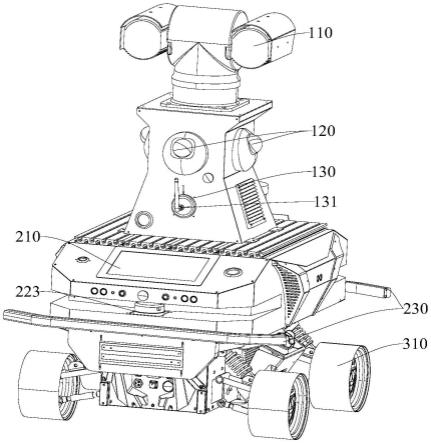
32.图1是本实用新型的基于5g的远程巡检无人车的背面立体结构示意图;
33.图2是本实用新型的基于5g的远程巡检无人车的正面立体结构示意图;
34.图3是图1所示的云台的结构示意图;
35.图4是图1所示的车身的分解结构示意图;
36.图5是图2所示的车身的分解结构示意图;
37.图6是图1所示的底盘的分解结构示意图;
38.图7是图2所示的底盘的分解结构示意图;
39.附图标号说明:
40.云台100;旋转探照灯110;高清摄像头120;5g路由器130,路由天线131;
41.车身200;显示屏210;导航模组220,深度摄像头221,多线激光雷达222,激光雷达223,超声波传感器224;防撞条230;导航模组开关240;
42.底盘300;移动模组310,车轮311,差速电机312,压力减震系统313,悬架314,连杆3141,弹性部件3142;照明灯320;急停开关330;电源开关340。
具体实施方式
43.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
44.为了解决现有的无人巡检机器人巡检范围有限,存在巡检盲区,且巡检过程中的图像信息无法及时传输给后台服务器,造成巡检异常无法及时识别,无法达到巡检的目的的问题,本实用新型提供了一种基于5g的远程巡检无人车,实现对四周物体无死角的监控,扩大巡检视野,同时增加数据传输的带宽,实现对图像数据的实时传输,提高巡检效率。
45.具体地,参考图1,本实用新型的基于5g的远程巡检无人车包括:车身和底盘,还包括:云台100,云台100设于车身200上;云台100包括:5g路由器130和高清摄像头120;高清摄像头120与云台100通讯连接,5g路由器130用于将云台100接收的数据传输给服务器;移动模组310,移动模组310设于底盘300上;移动模组310用于控制车身200的移动或者暂停;主控制器,主控制器设于底盘300上;主控制器向移动模组310发送控制信号,控制模组的移动或者暂停。
46.如图1和3所示,车身200设置于底盘300上,云台100设置于车身200上。其中,云台100为中空无底的方形结构。云台100底部设置有通孔,可以将云台100固定在车身200上,该固定方式包括但不限于螺丝连接。云台100有四个侧面,每个侧面上都固定安装有一个高清摄像头120,高清摄像头120包括但不限于360度高清摄像头。四个高清摄像头120实时监控周围环境,保证监控视角不存在盲区,确保不会放过任何异常的瞬间。高清摄像头120与云台100通讯连接,包括但不限于数据线连接。云台100的内部设有5g路由器130,高清摄像头120将视频数据传输给云台100,云台100通过5g路由器130将视频数据传输给后台服务器,完成相应的巡检工作。可以理解地,5g路由器130还包括路由天线131,用于接收和发射无线信号。
47.进一步地,云台100的上表面固定连接有台柱,在台柱左右两侧固定连接有两个旋转探照灯110,可以提高高清摄像头120在夜间的巡逻视线。
48.进一步地,如图6所示,移动模组310设于车身200的底盘300上。移动模组310包括:四个车轮311,每个车轮311设有一个差速电机312。差速电机312与车轮311同轴连接,差速电机312通过悬架314连接于底盘300上。悬架314包括:连杆3141和弹性部件3142,连杆3141一端连接差速电机312,一端连接底盘300;弹性部件3142的一端连接在连杆3141上,一端连接于底盘300,起到支撑和缓冲的作用。差速电机312带有驱动程序,能够进行前后左右移动,从而带动车轮311移动。差速电机312与主控制器通讯连接,主控制器向差速电机312发送控制信号,控制差速电机312的移动、暂停或者转向。
49.进一步地,移动模组310还包括:压力减震系统313。压力减震系统313套设于弹性部件3142内,一端连接于连杆3141上,一端连接于底盘300上。压力减震系统313可以抑制弹性部件3142回弹冲击,吸收弹性部件3142的振动和变形,起到保护底盘300的作用。
50.进一步地,在一些实施例中,本实用新型的基于5g的远程巡检无人车还包括:导航模组220。导航模组220设于车身200上,车身200为组装成型的车壳,车壳上开设有若干安装口,车壳前后两端各有一个凹槽。导航模组220包括:传感器系统和工控机,工控机设于车身
200内,传感器系统固定安装在车身200的车壳上。传感器系统与工控机通讯连接,工控机与主控制器通讯连接。传感器系统用于监测周围障碍物,并将监测到的障碍物数据信息传输给工控机,工控机对接收的数据进行分析处理后传输给主控制器。
51.具体的,传感器系统包括:深度摄像头221、多线激光雷达222和激光雷达223,其中激光雷达223有两个,分别设于车身200前端和后端凹槽的正中间部位。具体地,本实用新型的基于5g的远程巡检无人车将设有多线激光雷达的一端定义为前端,深度摄像头221设于车身200前端激光雷达223的上方位置,多线激光雷达222设于车身200的前端。激光雷达223与工控机通讯连接,激光雷达223通过发射激光束探测环境中物体的位置、状态、速度等特征信息,并将探测到的物体信息发送给工控机。深度摄像头221与工控机通讯连接,是具有立体视觉的视觉传感器,通过将结构光投射至物体表面,再使用摄像机接收该物体表面反射的结构光图案,以此获得拍摄对象的三维信息。多线激光雷达222与工控机通讯连接,多线激光雷达222可以识别物体的高度信息并获取周围环境的3d扫描图,并将数据传输给工控机。
52.进一步地,航模组还包括:超声波传感器224,超声波传感器224设于车身200的四周。超声波传感器224的数量至少为8个,其中,车身前后两端各设有2个,左右两侧各设有2个。超声波传感器224与工控机通讯连接,超声波传感器224用于检测环境中的物体的距离信息,并将该距离信息传输给工控机。
53.进一步地,工控机将接收到的周围环境数据进行融合处理,通过数据融合技术实现建图、导航、避障等功能。工控机将处理后的数据传输给主控制器,主控制器根据工控机的数据信息向差速电机312发送控制信号,差速电机312根据接收到的控制信号控制车身200的移动、暂停或者转向。云台100上的高清摄像头120在巡检无人车移动过程中实现对四周物体无死角的监控,扩大巡检视野,并将监控画面通过5g路由器130传输给后台服务器,实现巡检无人车的远程巡检功能。
54.进一步地,导航模组220还包括:显示屏210,显示屏210安装于车身200的后端。显示屏210与工控机通讯连接,包括但不限于hdmi线连接,显示屏210将工控机接收的系统画面显示于显示屏210上。
55.进一步地,车身200还包括:防撞条230,防撞条230设于车身200前端和后端的边缘处,防撞条230与车身200的连接方式采用现有技术。防撞条230在巡检无人车与物体碰撞后使车身200停止移动,起到保护巡检无人车的作用。
56.进一步地,车身200上还包括:一个导航模组开关240和一个急停按钮,导航模组开关240用于切断电池对导航模组220的供电,使导航模组220停止工作,急停按钮使导航模组220暂停工作。
57.可以理解地,本实用新型的基于5g的远程巡检无人车还包括:电池,电池安装于底盘300上,为巡检无人车的正常工作提供电能。
58.进一步地,底盘300上还包括:照明灯320,照明灯320安装于底盘300上,用于黑暗环境下提高照明光线。
59.进一步地,底盘300上还包括:两个急停开关330,在底盘300左右两侧各一个,急停开关330与主控制器连接,用于紧急情况下手动使巡检无人车暂停。
60.进一步地,底盘300上还包括:电源开关340,电源开关340用于切断电池供电,使巡
检无人车停止工作。
61.实施本实用新型的基于5g的远程巡检无人车,具有以下有益效果:云台上安装四个高清摄像头,实现对四周物体无死角的监控,扩大巡检视野,云台内的5g路由器增加数据传输的带宽,实现对图像数据的实时传输,提高巡检效率。
62.以上实施例只为说明本实用新型的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本实用新型的内容并据此实施,并不能限制本实用新型的保护范围。凡跟本实用新型权利要求范围所做的均等变化与修饰,均应属于本实用新型权利要求的涵盖范围。
63.应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本实用新型所附权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1