一种面向教育的模块化多足机器人
1.本实用新型属于多足机器人技术领域,具体涉及一种面向教育的模块化多足机器人。
背景技术:
2.多足机器人由多条腿部与身体组合而成。现市面上大多数多足机器人,腿部与身体之间、腿部各关节之间的连接方式为螺丝或螺栓连接。拼接过程耗时较长,并且用户难于按照自己的想法进行扩展。在年龄较小的学生使用过程中,使用金属片制造的部件、细小尖锐的螺丝可能会造成不必要的人身伤害。在中小学校智能机器人教育的推广中,成本是必须要考虑的因素;有的智能机器人大多存在高成本、高维护费用的缺点。
技术实现要素:
3.针对现有技术中存在的上述问题,本实用新型的目的在于提供一种制作及维护成本低、使用安全、扩展性好的面向教育的模块化多足机器人。
4.本实用新型提供如下技术方案:
5.一种面向教育的模块化多足机器人,包括机器人主体及设置在机器人主体上的一组模块化腿部系统;所述模块化腿部系统包括依次连接的腿部连接件、舵机组件及机器人爪;所述舵机组件包括舵盘及与舵盘相连接的舵机壳;所述腿部连接件包括连接件主体及设置在连接件主体一侧的插头;所述舵盘包括u型的舵盘主体及设置在舵盘主体一侧的插座;所述舵机壳包括空心薄壁立方体结构的舵机壳主体及设置在舵机壳主体一侧的插头,舵盘主体与舵机壳主体配合连接;所述机器人爪上设有插座;所述插头与对应的插座之间对应设置组合形成卡扣连接机构。
6.进一步的,所述舵机组件的数量为一组。
7.进一步的,所述舵机组件的数量为若干组,若干组舵机组件之间依次连接。
8.进一步的,所述插头为长方体结构,其中部设置有正方形的通孔;所述插头的外侧面一与外侧面三相对设置,外侧面二与外侧面四相对设置;所述外侧面一及外侧面三上均设有沉槽;所述外侧面二与外侧面四上均设有贯穿侧壁的u型槽,所述u型槽区域内设有卡接用的第一凸起及拆卸用的第二凸起。
9.进一步的,所述第一凸起靠近u型槽的底部设置,其包括外侧的四分之一圆柱结构及内侧的曲面结构;所述第二凸起远离u型槽的底部设置,其为长方体结构。
10.进一步的,所述插座为长方体结构,其中部设置有通孔,通孔的四个内侧孔壁上均设有楔形凸起,所述楔形凸起与第一凸起对应设置。
11.进一步的,所述插座的四个侧壁上均设有贯穿侧壁的通槽。
12.进一步的,所述机器人爪整体呈楔形结构,其下端与地面接触,下端的端部设有锯齿。
13.通过采用上述技术,与现有技术相比,本实用新型的有益效果如下:
14.1)本实用新型采用模块化方法构建机器人腿部,腿部主体部分仅由四种组合模块构成,构造容易、生产方便、替换及维护费用低;
15.2)本实用新型插头与插座可在0
°
、90
°
、180
°
、270
°
方向上实现连接,连接可靠性好,可实现互相垂直关节的构建;
16.3)本实用新型可根据使用者的实际需求,构建多种自由度的腿部系统,适用于不同知识层次的中小学生,具有适用性广泛的特点;
17.4)本实用新型安装和拆卸时仅需要通过各个插头与插座之间的拔插实现,具有省时省力的特点;在面向中小学生的机器人教育实践中,该特点能够节省时间,让课堂效率最大化。
附图说明
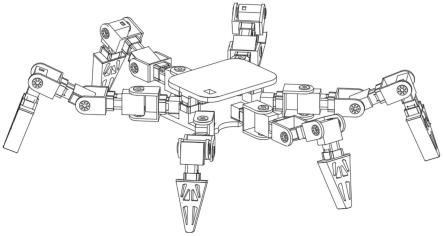
18.图1为本实用新型的整体结构示意图;
19.图2为本实用新型一个自由度模块化腿部系统的结构示意图;
20.图3为本实用新型两个自由度模块化腿部系统的结构示意图;
21.图4为本实用新型三个自由度模块化腿部系统的结构示意图;
22.图5为本实用新型腿部连接件的结构示意图;
23.图6为本实用新型舵盘的结构示意图;
24.图7为本实用新型舵机壳的结构示意图;
25.图8为本实用新型机器人爪的结构示意图;
26.图9为本实用新型插头的结构示意图;
27.图10为本实用新型插座的结构示意图。
具体实施方式
28.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合说明书附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
29.相反,本实用新型涵盖任何由权利要求定义的在本实用新型的精髓和范围上做的替代、修改、等效方法以及方案。进一步,为了使公众对本实用新型有更好的了解,在下文对本实用新型的细节描述中,详尽描述了一些特定的细节部分。对本领域技术人员来说没有这些细节部分的描述也可以完全理解本实用新型。
30.请参阅图1-10,一种面向教育的模块化多足机器人,包括机器人主体及设置在机器人主体上的一组模块化腿部系统;模块化腿部系统包括依次连接的腿部连接件1、舵机组件及机器人爪4;舵机组件包括依次连接的腿部连接件1、舵机组件及机器人爪4。
31.具体的,如图5所示,腿部连接件1用于连接机器人主体;其包括连接件主体1-1及设置在连接件主体1-1一侧的插头0-1,连接件主体1-1为边长为25mm的立方体。
32.具体的,如图6-7所示,舵机组件包括舵盘2及舵机壳3。舵盘2包括u型的舵盘主体2-1及设置在舵盘主体2-1一侧的插座0-2;舵机壳3包括23*43*44mm空心薄壁立方体结构的舵机壳主体3-1及设置在舵机壳主体3-1一侧的插头0-1;腿部连接件1与舵盘2之间通过插头0-1与插座0-2组合形成的卡扣连接结构相连接,舵盘主体2-1与舵机壳主体3-1之间配合
连接。
33.具体的,如图8所示,机器人爪4整体为底部宽为58mm,长度为100mm,厚度为29.5mm的楔形结构,其上端面上设有插座0-2,机器人爪4与舵机壳3之间通过插头0-1与插座0-2组合形成的卡扣连接结构相连接;机器人爪4的下端与地面接触,下端的端部设有高度为1mm的一组锯齿,保证其结构稳定性。
34.具体的,如图9所示,插头0-1为长方体结构,其中部设置有正方形的通孔;插头0-1外形长宽均为23mm、高为30mm,通孔边长为19mm。
35.插头0-1的外侧面一a与外侧面三c相对设置,外侧面二b与外侧面四d相对设置;外侧面一a及外侧面三c上均设有宽度为14mm,深度为1mm的沉槽。外侧面二b与外侧面四d上均设有贯穿侧壁的u型槽,u型槽的宽度为0.5mm的;其两侧边之间间距为14mm,侧边长度为15.5mm。
36.u型槽区域内设有卡接用的第一凸起及拆卸用的第二凸起;第一凸起靠近u型槽的底部设置,其包括外侧半径为1.5mm的四分之一圆柱结构及内侧的曲面结构;第二凸起远离u型槽的底部设置,其为高度为0.3mm,宽度为3mm的长方体结构,第二凸起为了能省力的拆卸已经装配好的插口而设计。
37.具体的,如图10所示,插座0-2为正方体结构,其中部设置有正方形通孔;插座0-2的外形长宽均为29.5mm、高为13mm;正方形通孔边长为23.5mm。正方形通孔的四个内侧孔壁上均设有高度为1mm、宽度为14mm、长度为4mm的楔形凸起,楔形凸起与第一凸起对应设置,用于卡住插头0-1上的第一凸起。四个侧壁上各有两条贯穿壁体、宽度为0.5mm的槽,两槽相距20mm,长度为13mm。
38.插头0-1和插座0-2可通过插头0-1上的凸起和插座0-2上的楔形凸起机械固定,由于以上结构由3d打印而成,材料具有一定的强度和弹性,可以形成模块化卡扣连接机构。
39.本实施例模块化接口,可实现任意两个配合零件在0
°
、90
°
、180
°
、270
°
方向上实现连接。
40.模块化腿部系统的关节通过舵盘2和舵机壳3配合形成。在一个自由度腿部实施例中,需要一组舵机壳和舵盘。在两个自由度腿部实施例中,需要两组舵机壳和舵盘,其中一组舵机壳3和舵盘2和另一组呈90度,形成互相垂直的两组关节。在三个自由度腿部实施例中,需要三组舵机壳和舵盘,其中一组与另外两组呈90度,形成腰关节,其余两组与腰关节垂直,形成膝关节和髋关节。
41.如图2所示,舵盘主体2-1与舵机壳主体3-1通过齿轮配合,舵机壳主体3-1与机器人爪4通过模块化卡扣连接机构连接。该实施例可完成一个自由度腿部的运动,即腰关节的上下摆动。
42.如图3所示,腿部连接件1与舵盘2-1通过模块化卡扣连接机构连接,两组舵机组件之间依次连接形成,形成腰关节及膝关节。该实施例可完成两个自由度腿部的运动,即腰关节的前后摆动和膝关节的上下转动。
43.如图4所示,腿部连接件1与舵盘2-1通过模块化卡扣连接机构连接,三组舵机组件之间依次连接形成,形成腰关节、膝关节及髋关节。该实施例可完成三个自由度腿部的运动,即腰关节的前后摆动、膝关节的上下转动以及髋关节的上下转动。
44.如图1所示,本实施例为具有十八个可控自由度的仿生六足机器人。其六条腿均采
用如图9的腿部实施例结构。本实施例一共使用了六个身体-腿部连接件,十八个舵盘,十八个舵机壳以及六个机器人爪。重复使用以上四种结构即可完成本实施例的构建,体现出模块化设计的优点。
45.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1