钻探取样勘测智能小车的制作方法
1.本实用新型涉及勘测取样装置技术领域,尤其涉及一种钻探取样勘测智能小车。
背景技术:
2.随着矿山智能化的快速发展,矿山的采掘生产逐步信息化、机械化,由于很多矿山开采历史较长、地表浅部矿产资源开采殆尽,逐渐转入深部开采。深部开采与浅部开采所处的环境差异较大,深部开采伴有高地应力、高地温、高岩溶水压和强烈的开采扰动,人为勘测取样存在很大局限性,且具有一定的安全隐患;在动工开采之前均需钻探取样确定矿岩稳固性、碎胀系数、力学参数等作参考确定采矿方法,且在矿体边缘地带为避免地表勘探误差也需进行槽探、钻探核实圈定储量和判别矿脉分布特点。
3.现有技术中,公告号为cn106545338a的专利文件中公开了一种地质勘测专用自带照明系统的机器人,包括机架,机架的后端设置有储能装置和控制箱,控制箱内设置有单片机和电性连接单片机的射频收发装置,且机架在控制箱的前端安装有可旋转式摄像装置,可旋转式摄像装置的摄像头外端安装有第二照明灯,机架的下端安装有动力箱。上述技术方案中设计的勘测机器人自带照明系统和摄像系统,能够代替工人在雨雪、黑夜和难以行走的条件下进行实地勘测和取样,从而减少工人的体力劳动量,并且勘测过程能够通过远程监控,装置本身运动和取样能力强大,能够有效的减轻勘测人员携带仪器的负担,因此具有很高的实用价值。但是,上述技术方案中设计的机器人由于体积庞大,在应用于地下采样勘探工作时,操作困难,同时,机器人本身的大体积易对地下结构造成破坏;另外,地下结构本身具有复杂性,而上述技术方案中的机器人仅采用单一的方式进行取样,因而不适用于地下矿山的勘探和取样。
4.有鉴于此,有必要设计一种改进的钻探取样勘测智能小车,以解决上述问题。
技术实现要素:
5.本实用新型的目的在于提供一种钻探取样勘测智能小车。
6.为实现上述实用新型目的,本实用新型提供了一种钻探取样勘测智能小车,包括小车车身主体及相对设置于所述小车车身主体上的第一取样组件和第二取样组件,所述第一取样组件包括钻头取样组件和超声波破碎组件;
7.所述小车车身主体呈四边形,所述小车车身主体的两侧相对设有越障装置和若干车轮;
8.所述小车车身主体的顶面设有系统控制装置,所述系统控制装置的顶面设有摄像头组件和信号接收器。
9.进一步地,所述第二取样组件包括机械手和用于连接所述机械手和所述小车车身主体的第三伸缩臂。
10.进一步地,所述小车车身主体上与所述第二取样组件相对应的位置还设有收集装置,所述收集装置用于对采集的样品进行收集。
11.进一步地,所述第三伸缩臂和所述机械手之间还设有第三旋转组件,利用所述第三旋转组件能够实现所述机械手与所述第三伸缩臂之间发生转动。
12.进一步地,所述钻头取样组件通过固定座固定于小车车身主体上,所述钻头取样组件包括取样器和用于将所述取样器与所述小车车身主体连接的第一伸缩臂,所述第一伸缩臂的一端通过第一旋转组件与所述取样器活动连接,所述第一伸缩臂的另一端固定于固定座上。
13.进一步地,所述超声波破碎组件包括破碎钻头和用于连接所述破碎钻头和所述小车车身主体的第二伸缩臂,所述破碎钻头和所述第二伸缩臂之间设有换能器和第二旋转组件,且所述换能器靠近所述破碎钻头。
14.进一步地,所述小车车身主体上设有所述第一取样组件的一侧还设有防爆灯。
15.进一步地,所述摄像头组件通过第三基座设置于所述系统控制装置顶端,所述摄像头组件与所述第三基座活动连接,所述摄像头组件包括摄像头机身和将所述摄像头机身与所述系统控制装置连接的第四伸缩臂。
16.进一步地,所述越障装置设置于所述小车车身主体中部,所述越障装置与所述小车车身主体通过车轴连接,所述越障装置活动设置于车轴一侧,包括两个第一车轮和连接两个所述第一车轮的履带。
17.进一步地,所述第一伸缩臂、所述第二伸缩臂及所述第三伸缩臂在收缩状态下均呈“z型”。
18.本实用新型的有益效果是:
19.本实用新型提供的钻探取样勘测智能小车,通过在小车车身主体上相对设置第一取样组件和第二取样组件,在小车车身主体的两侧相对设置越障装置和若干车轮,同时,在小车车身主体的顶面设置系统控制装置,并在系统控制装置的顶面配设摄像头组件和信号接收器,得到了一种结构简单、智能化、操作灵活的适用于矿山勘探的钻探取样勘测智能小车。通过设置包括钻头取样组件和超声波破碎组件的第一取样组件,在小车车身主体的另一侧设置包括机械手的第二取样组件,同时,在设有第二取样组件的相应区域设置收集装置,可利用超声波破碎组件将待取样的岩石破碎,再利用钻头取样组件将破碎的岩石从岩体内取出并转移至地面,最后利用第二取样组件将样品转移至收集装置,上述过程中可利用第一取样组件和第二取样组件之间的相互配合实现精准采样;通过同时设置越障装置和车轮,利于小车在地下勘探和取样区灵活行走,极大提升了小车的灵活性和实用性;通过在系统控制装置的顶面设置摄像头组件和信号接收器,不仅利于在终端观测小车的工作状态,同时还可对小车的整个勘探和取样过程进行进行存储,进一步提高了小车的实用性。
附图说明
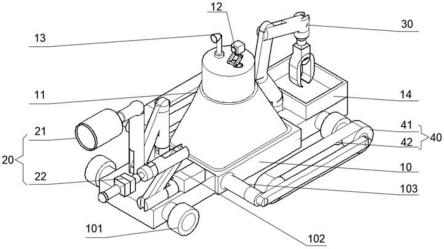
20.图1为本实用新型的钻探取样勘测智能小车的结构示意图;
21.图2为图1中钻头取样组件的结构示意图;
22.图3为图1中超声波破碎组件的结构示意图;
23.图4为图1中第二取样组件的结构示意图;
24.图5为图1中摄像头组件的结构示意图;
25.附图标记如下:
26.10、小车车身主体;101、车轮;102、防爆灯;103、车轴;11、系统控制装置;12、摄像头组件;121、摄像头机身;122、第四伸缩臂;13、信号接收器;14、收集装置;20、第一取样组件;21、钻头取样组件;211、取样器;212、第一伸缩臂;22、超声波破碎组件;221、破碎钻头;222、换能器;223、第二伸缩臂;30、第二取样组件;31、机械手;32、第三伸缩臂;40、越障装置;41、第一车轮;42、履带。
具体实施方式
27.为了使本实用新型的目的、技术方案和优点更加清楚,下面结合附图和具体实施例对本实用新型进行详细描述。
28.在此,还需要说明的是,为了避免因不必要的细节而模糊了本实用新型,在附图中仅仅示出了与本实用新型的方案密切相关的结构和/或处理步骤,而省略了与本实用新型关系不大的其他细节。
29.另外,还需要说明的是,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
30.请参阅图1至图5所示,本实用新型提供的钻探取样勘测智能小车,包括小车车身主体10及相对设置于小车车身主体10上的第一取样组件20和第二取样组件30,小车车身主体10呈四边形,小车车身主体10的两侧相对设有越障装置40和若干车轮101,小车车身主体10的顶面设有系统控制装置11,系统控制装置11的顶面设有摄像头组件12和信号接收器13。
31.请参阅图1所示,越障装置40设置于小车车身主体10中部,通过车轴103与小车车身主体10进行连接;具体地,车轴103固定于小车车身主体10上,越障装置40活动设置于车轴103一侧,包括两个第一车轮41和连接两个第一车轮41的履带42,远离车轴103的第一车轮41的中心设有连接杆(图中未标号),连接杆与车轴103之间连接有旋转轴承(图中未标号);车轮101分设于小车车身主体10上设有第一取样组件20的一侧和越障装置40与小车车身主体10之间。通过上述设置,可在车轮101的驱动下带动越障装置40进行运动,即可使小车行进。
32.进一步地,请参阅图2和图3并结合图1所示,第一取样组件20通过固定座(图中未标号)固定于小车车身主体10上,包括钻头取样组件21和超声波破碎组件22,具体地,钻头取样组件21包括取样器211和用于将取样器211与小车车身主体10连接的第一伸缩臂212,第一伸缩臂212的一端通过第一旋转组件(图中未标号)与取样器211活动连接,另一端固定于固定座上,第一伸缩臂212在收缩状态下呈“z型”,取样器211内形成中空柱体,便于在取样时容纳样品;超声波破碎组件22包括破碎钻头221和用于连接破碎钻头221和小车车身主体10的第二伸缩臂223,第二伸缩臂223在收缩状态下呈“z型”,破碎钻头221和第二伸缩臂223之间设有换能器222和第二旋转组件(图中未标号),且换能器222靠近破碎钻头221,第二伸缩臂223的另一端与第一基座进行连接;特别地,小车车身主体10上设有第一取样组件20的一侧还设有防爆灯102,为保证防爆灯102的照明效果,钻头取样组件21和超声波破碎组件22应不遮挡防爆灯102。如此设置,可在需要采样的时候利用钻头取样组件21破碎岩
石,并利用超声波破碎组件22将破碎的岩石从岩体内取出并放置于地面,便于进行后续的样品收集工作。
33.请参阅4并结合图1所示,第二取样组件30包括机械手31和用于连接机械手31和小车车身主体10的第三伸缩臂32,第二取样组件30通过第二基座(图中未标号)与小车车身主体10进行连接,第三伸缩臂32和机械手31之间还设有第三旋转组件(图中未标号),利用第三旋转组件可实现机械手31与第三伸缩臂32之间的灵活转动,第三伸缩臂32在收缩状态下呈“z型”,小车车身主体10上与第二取样组件30相对应的位置还设有收集装置14,便于对样品进行收集;如此设置,可利用第二取样组件30将地面的岩石拾起后,放置于收集装置14内。
34.进一步地,请参阅5并结合图1所示,摄像头组件12通过第三基座(图中未标号)设置于系统控制装置11顶端,摄像头组件12与第三基座活动连接,摄像头组件12包括摄像头机身121和将摄像头机身121与系统控制装置11连接的第四伸缩臂122,具体地,第四伸缩臂122在收缩状态下呈“z型”;如此设置,可在取样的过程中,利用信号接收器13将钻探取样勘测智能小车与终端进行连接,并在取样的过程中利用摄像头组件12追踪和记录传输整个取样过程。
35.下面结合具体的实施例对本实用新型的钻探取样勘测智能小车作进一步说明:
36.实施例1
37.本实施例提供了一种钻探取样勘测智能小车,包括小车车身主体10及相对设置于小车车身主体10上的第一取样组件20和第二取样组件30,小车车身主体10呈四边形,小车车身主体10的两侧相对设有越障装置40和车轮101,小车车身主体10的顶面设有系统控制装置11,系统控制装置11的顶面设有摄像头组件12和信号接收器13。
38.进一步地,第一取样组件20固定于小车车身主体10上,包括钻头取样组件21和超声波破碎组件22,具体地,小车车身主体10上设有防爆灯102,钻头取样组件21固定于防爆灯102外壳上,其包括取样器211和用于将取样器211与小车车身主体10连接的第一伸缩臂212,第一伸缩臂212的一端通过第一旋转组件与取样器211活动连接,另一端固定于固定座上,第一伸缩臂212在收缩状态下呈“z型”,取样器211内形成中空柱体,便于在取样时容纳样品;超声波破碎组件22包括破碎钻头221和用于连接破碎钻头221和小车车身主体10的第二伸缩臂223,第二伸缩臂223在收缩状态下呈“z型”,破碎钻头221和第二伸缩臂223之间设有换能器222和第二旋转组件,且换能器222靠近破碎钻头221,第二伸缩臂223的另一端与第一基座进行连接。如此设置,可在需要采样的时候利用钻头取样组件21破碎岩石,并利用超声波破碎组件22将破碎的岩石从岩体内取出并放置于地面,便于进行后续的样品收集工作。
39.其中,第二取样组件30包括机械手31和用于连接机械手31和小车车身主体10的第三伸缩臂32,第二取样组件30通过第二基座与小车车身主体10进行连接,第三伸缩臂32和机械手31之间还设有第三旋转组件,利用第三旋转组件可实现机械手31与第三伸缩臂32之间的灵活转动,第三伸缩臂32在收缩状态下呈“z型”,小车车身主体10上与第二取样组件30相对应的位置还设有收集装置14,便于对样品进行收集;如此设置,可利用第二取样组件30将地面的岩石拾起后,放置于收集装置14内。
40.进一步地,摄像头组件12通过第三基座设置于系统控制装置11顶端,摄像头组件
12与第三基座活动连接,摄像头组件12包括摄像头机身121和将摄像头机身121与系统控制装置11连接的第四伸缩臂122,具体地,旋转机身的底面固定有直立杆,第四伸缩臂122包括两相对设置的“l型”伸缩杆,两根“l型”伸缩杆的端点和拐角处通过连接横杆进行活动连接,靠近摄像头的连接横杆与直立杆活动连接,靠近第三基座的连接横杆与第三基座活动连接;如此设置,可在取样的过程中,利用信号接收器13将钻探取样勘测智能小车与终端进行连接,并在取样的过程中利用摄像头组件12追踪和记录传输整个取样过程,追踪记录的过程中可利用第四伸缩臂122与摄像头之间的相对运动,使摄像头发生旋转,从而更大范围捕捉取样过程的信息。
41.特别地,越障装置40设置于小车车身主体10中部,通过车轴103与小车车身主体10进行连接;具体地,车轴103固定于小车车身主体10上,越障装置40活动设置于车轴103一侧,包括两个第一车轮41和连接两个第一车轮41的履带42,远离车轴103的第一车轮41的中心设有连接杆,连接杆与车轴103之间连接有旋转轴承;本实施例中设有四个车轮101,其中,两个车轮101设置于小车车身主体10上设有第一取样组件20的一侧,另外两个车轮101设置于越障装置40与小车车身主体10之间。通过上述设置,可四个车轮101的驱动下带动越障装置40进行运动,即可使小车行进。
42.本实用新型的工作原理:应用本实用新型提供的钻探取样勘测智能小车时,先利用信号接收器13接收来自终端的操作指令并将其转化为电信号传输给系统控制装置11,此时,钻探取样勘测智能小车即可在终端的控制下行驶至需要勘探和采样的目的地;小车到达目的地后,自身驱使超声波破碎组件22和钻头取样组件21进行取样,该过程中可通过调节第一伸缩臂212和第二伸缩臂223到合适位置接近取样的矿岩,同时通过调节第一旋转组件和第二旋转组件使取样器211和破碎钻头221至精确部位,并利用换能器222直接对岩石加载超声波振动,然后破碎钻头221接收到高频超声振动并通过柄部将超声振动放大,从而带动破碎钻头221做轴向高频振动而破碎岩石;接着,钻头取样组件21借助于第一伸缩臂212和第一旋转组件将柱形取样器211调整至钻孔内取出岩样置于地面适宜位置;最后,通过终端调整车体方位使车体后部靠近岩样后,驱动第三伸缩臂32和第三旋转组件使机械手31拾取岩样至收集装置14内,至此钻探取样步骤实施结束。上述整个取样过程中,摄像头组件12内的摄像头依靠第四伸缩臂122和摄像机身在直立杆上伸缩旋转追踪记录并将储存的影像数据传输至终端。
43.综上所述,本实用新型提供的钻探取样勘测智能小车,包括小车车身主体10及相对设置于小车车身主体10上的第一取样组件20和第二取样组件30,小车车身主体10呈四边形,小车车身主体10的两侧设有越障装置40和若干车轮101,小车车身主体10的顶面设有系统控制装置11,系统控制装置11的顶面设有摄像头组件12和信号接收器13。通过上述方式,提供了一种用于矿山勘探的钻探取样勘测智能小车,极大提高了矿山作业的机械化、信息化水平。
44.以上实施例仅用以说明本实用新型的技术方案而非限制,尽管参照较佳实施例对本实用新型进行了详细说明,本领域的普通技术人员应当理解,可以对本实用新型的技术方案进行修改或者等同替换,而不脱离本实用新型技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1