一种越障机器人底盘的制作方法
1.本实用新型涉及机器人技术领域,具体是一种越障机器人底盘。
背景技术:
2.机器人是一种能够半自主或全自主工作的智能机器,机器人能够通过编程和自动控制来执行诸如作业或移动等任务,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围。
3.根据中国专利号为cn216886990u所公开的一种轮式越障机器人底盘,包括底盘主体;主动轮,其可旋转支撑在底盘主体上;安装架,其一端可拆卸连接底盘主体;越障轮,其可旋转支撑在安装架的另一端;越障组件,其设置在安装架与越障轮之间,但是该装置在使用使还存在一些不足之处,例如现有的该装置容易因与机器人的连接安装方式,导致使用者在对其拆装更换时出现不便的问题,为此我们提出一种越障机器人底盘解决上述问题
技术实现要素:
4.本实用新型的目的在于提供一种越障机器人底盘,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:
6.本实用新型一种越障机器人底盘,包括框体,所述框体的内侧壁固定连接有横板,所述框体的内底壁放置有相对称的蓄电池,每个所述蓄电池的上表面均与横板的底面相接触,所述框体的左右两侧面均开设有通槽,所述横板的上表面放置有机体,所述机体的左右两侧面均开设有定位槽,每个所述定位槽的内部均活动连接有定位板,两个所述定位板相互远离的一端均贯穿通槽并延伸至框体的外部,所述框体的顶端开设有相对称的限位槽,每个所述定位板的上表面均开设有连接槽,每个所述连接槽的内部均活动连接有连接板,每个所述连接板的顶端均贯穿限位槽并延伸至机体的左右两侧,每个所述连接板的顶端均固定连接有受力板,所述机体的左右两侧面均开设有滑槽,每个所述滑槽的内部均活动连接有滑块,两个所述滑块相互远离的一侧面分别与两个受力板相互靠近的一侧面固定连接,所述框体的底面固定连接有两组相对称的万向轮。
7.作为本实用新型再进一步的方案:所述框体的内底壁固定连接有立板,所述立板的顶端与横板的底面固定连接。
8.作为本实用新型再进一步的方案:所述框体的左右两侧均设有指板,两个所述指板相互靠近一端分别与两个定位板相互远离的一端固定连接。
9.作为本实用新型再进一步的方案:所述机体的底面开设有多个导向槽,每个所述导向槽的内部均活动连接有导向块,每个所述导向块的底面均与横板的上表面固定连接。
10.作为本实用新型再进一步的方案:每个所述连接槽的内底壁和每个连接板的底端均固定镶嵌有磁铁,每组所述磁铁相互靠近的一侧面均相互吸引。
11.作为本实用新型再进一步的方案:每个所述受力板的上方均设有指垫,两个所述
指垫相互靠近的一侧面分别与两个滑块相互远离的一侧面固定连接。
12.与现有技术相比,本实用新型的有益效果是:
13.该一种越障机器人底盘,通过定位槽和定位板的配合,能够对该装置进行快速定位安装,避免该装置在更换安装时出现不便的现象,通过设置有连接槽和连接板的配合,可以对该装置进行二次加固,进一步的增加了该装置的坚固性,通过滑槽和滑块的配合,可以使受力板和连接板的移动更加平稳流畅,避免受力板在移动时出现偏移卡位的现象。
附图说明
14.此处所说明的附图用来提供对本技术的进一步理解,构成本技术的一部分,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。
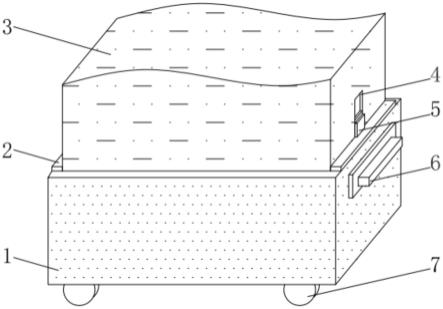
15.图1为本实用新型中框体的立体结构域示意图;
16.图2为本实用新型中框体的正剖图;
17.图3为本实用新型中连接板的仰视图;
18.图4为本实用新型图2中a处结构放大示意。
19.图中各附图标注与部件名称之间的对应关系如下:
20.1、框体;2、受力板;3、机体;4、滑槽;5、指垫;6、指板;7、万向轮;8、蓄电池;9、定位板;10、滑块;11、导向块;12、导向槽;13、立板;14、横板;15、磁铁;16、连接板;17、限位槽;18、通槽;19、定位槽;20、连接槽。
具体实施方式
21.以下将以图示揭露本实用新型的多个实施方式,为明确说明起见,许多实物上的细节将在以下叙述中一并说明。然而,应了解到,这些实物上的细节不应用以限制本实用新型。也就是说,在本实用新型的部分实施方式中,这些实物上的细节是非必要的。此外,为简化图示起见,一些习知惯用的结构与组件在图示中将以简单的示意的方式绘示之。
22.另外,在本实用新型中如涉及“第一”、“第二”等的描述仅用于描述目的,并非特别指称次序或顺位的意思,亦非用以限定本实用新型,其仅仅是为了区别以相同技术用语描述的组件或操作而已,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本实用新型要求的保护范围之内。
23.请参阅图1~3:本实用新型一种越障机器人底盘,包括框体1,框体1的内侧壁固定连接有横板14,框体1的内底壁放置有相对称的蓄电池8,每个蓄电池8的上表面均与横板14的底面相接触,框体1的左右两侧面均开设有通槽18,横板14的上表面放置有机体3,机体3的左右两侧面均开设有定位槽19,每个定位槽19的内部均活动连接有定位板9,两个定位板9相互远离的一端均贯穿通槽18并延伸至框体1的外部,框体1的顶端开设有相对称的限位槽17,每个定位板9的上表面均开设有连接槽20,每个连接槽20的内部均活动连接有连接板16,每个连接板16的顶端均贯穿限位槽17并延伸至机体3的左右两侧,每个连接板16的顶端均固定连接有受力板2,机体3的左右两侧面均开设有滑槽4,每个滑槽4的内部均活动连接
有滑块10,两个滑块10相互远离的一侧面分别与两个受力板2相互靠近的一侧面固定连接,框体1的底面固定连接有两组相对称的万向轮7。
24.框体1的内底壁固定连接有立板13,立板13的顶端与横板14的底面固定连接,可以对蓄电池8进行限位保护,避免蓄电池8容易因颠簸出现损坏的问题,框体1的左右两侧均设有指板6,两个指板6相互靠近一端分别与两个定位板9相互远离的一端固定连接,可以使使用者对定位板9的拿取更加便捷,避免使用者在对其拿取时出现不便的现象,机体3的底面开设有多个导向槽12,每个导向槽12的内部均活动连接有导向块11,每个导向块11的底面均与横板14的上表面固定连接,能够对机体3的安装进行初步导向限位,避免使用者在对其安装时出现偏移的现象。
25.每个连接槽20的内底壁和每个连接板16的底端均固定镶嵌有磁铁15,每组磁铁15相互靠近的一侧面均相互吸引,可以对连接板16进行初步定位,避免连接板16容易因稳定性不足出现脱落的现象,每个受力板2的上方均设有指垫5,两个指垫5相互靠近的一侧面分别与两个滑块10相互远离的一侧面固定连接,可以使滑块10的移动更加便捷,避免使用者在对其滑块10移动时出现不便的现象。
26.工作原理:在使用时,首先将该装置与电源相连通,并通过控制开关进行控制,然后将机体3放置在横板14处,并将定位板9插入至定位槽19的内部,从而对其进行暂时定位,接着利用指垫5推动受力板2和连接板16进行下落,从而利用连接板16和连接槽20对该装置进行定位,达到了取代了现有该装置的安装方式,避免了此类方式容易出现拆装不便的现象。
27.以上所述的,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1