一种仿生蜘蛛机器人
1.本实用新型涉及仿生机器人技术领域,特别涉及一种仿生蜘蛛机器人。
背景技术:
2.仿生是通过模仿生物系统的功能和行为来建造技术系统的一种科学方法;它打破了生物和机器的界限,将各种不同的系统沟通起来;运用仿生方法可创制新的机械;而蜘蛛作为自然界最常见的节肢动物之一,通过观察蜘蛛的运动形态,我们团队发现利用它身体特殊的结构,可以实现很多功能,因此我们模仿蜘蛛的结构设计了一种仿生蜘蛛机器人。
3.公告号为“cn217022715u”的中国实用新型专利提出了仿生蜘蛛机器人,该专利包括机器人身体和语音控制器,机器人身体的内部安装有动力电机,且动力电机的输出端安装有电机齿轮,电机齿轮的右侧安装有转轴传动齿轮,且转轴传动齿轮的内部安装有传动轴,传动轴的前端安装有传动齿轮,且传动齿轮前端安装有传动连接杆,传动连接杆的下方安装有第一连接杆,且第一连接杆的内部安装有第二连接转轴;该专利虽然能够模仿蜘蛛腿部的抬升、越障等动作,但是无法对腿部的角度进行限制,无法保证在承载重物时腿部不会因压力较大而趴在地上,同时该专利并未有模仿蜘蛛吐丝部分的功能,也没有土壤探测的功能。
技术实现要素:
4.针对上述技术问题,本实用新型提供一种仿生蜘蛛机器人,包括支撑板,支撑板上设置有程序控制组件,支撑板的侧面安装有多个行走组件,所述支撑板上安装有绳索弹射组件和土壤探测组件;所述行走组件包括大腿支架、第一驱动单元、小腿机构、第二驱动单元,所述第一驱动单元安装在支撑板上,所述大腿支架安装在第一驱动单元上,所述第二驱动单元安装在大腿支架上,所述小腿机构安装在第二驱动单元上,所述小腿机构和大腿支架之间安装有限位组件;所述小腿机构包括小腿支架一和小腿支架二,所述小腿支架二安装在第二驱动单元上,所述小腿支架一固定安装在小腿支架二上;所述限位组件包括连杆一、连杆二、连杆三,连杆一的一端转动安装在大腿支架上,连杆三的一端转动安装在小腿支架二上,连杆一的另一端与连杆三的另一端转动连接,所述连杆三上开有弧形槽,连杆二的一端滑动安装在连杆三上的弧形槽内,连杆二的另一端转动安装在连杆一上。
5.进一步地,所述第一驱动单元包括舵机一、支撑架一,所述舵机一固定安装在支撑板上,所述支撑架一固定安装在舵机一的输出轴上,所述支撑架一上固定安装有舵机二,所述舵机二的输出轴上固定安装有转动轴一,所述转动轴一和支撑架一转动连接,所述大腿支架固定安装在转动轴一上,舵机一与舵机二呈十字形分布。
6.进一步地,所述第二驱动单元包括转动轴二、转动轴三、从动齿轮、主动齿轮、舵机三,所述舵机三固定安装在大腿支架内,所述转动轴二固定安装在舵机三的输出轴上,所述转动轴二与大腿支架转动连接,所述主动齿轮固定安装在转动轴二上,所述转动轴三转动安装在大腿支架上,所述小腿支架二和从动齿轮均固定安装在转动轴三上,所述从动齿轮
与主动齿轮啮合连接。
7.进一步地,所述绳索弹射组件包括支撑座三、弹射机构、绳索收放机构,所述弹射机构和绳索收放机构均安装在支撑座三上,所述弹射机构和绳索收放机构连接。
8.进一步地,所述绳索收放机构包括支撑座四、转动轮、绳索、绕线轮,所述支撑座四固定安装在支撑座三上,所述绕线轮转动安装在支撑座四内,所述绕线轮与支撑座三转动连接,所述绳索呈卷状缠绕在绕线轮上,绳索的一端固定安装在绕线轮上,绳索的另一端与弹射机构连接,所述转动轮转动安装在支撑座四上,所述转动轮与绕线轮同轴固定安装。
9.进一步地,所述弹射机构包括限位座、弹射箱、连接头、支撑座五、电缸、连接杆、卡杆、弹射杆、弹簧,所述限位座、弹射箱、支撑座五均固定安装在支撑座三上,所述弹射箱内设置有滑动腔一和滑动腔二,所述限位座内设置有滑动腔三,所述弹射杆滑动安装在滑动腔一内,所述弹射杆与滑动腔三滑动连接,所述连接头设置在滑动腔二内,所述弹簧固定安装在连接杆内,所述弹簧设置在滑动腔二内,弹射杆的一端与绳索固定连接,所述连接头可拆卸地安装在弹射杆的另一端,弹射杆与绳索连接的一端设置有多个插销孔,所述电缸固定安装在支撑座五上,所述连接杆固定安装在电缸的活塞杆上,所述卡杆固定安装在连接杆上,卡杆远离连接杆的一端设置有插销,插销与插销孔相匹配。
10.进一步地,所述土壤探测组件包括支撑座一、升降单元、翻转单元、土壤探测仪,所述支撑座一可拆卸地安装在支撑板上,所述翻转单元安装在支撑座一上,所述升降单元安装在翻转单元上,所述土壤探测仪可拆卸地安装在升降单元上。
11.进一步地,所述翻转单元包括电机一、支撑座二,所述电机一安装在支撑座一上,所述电机一的输出轴上固定安装有连接轴,所述连接轴与支撑座一转动连接,所述支撑座二固定安装在连接轴上。
12.进一步地,所述升降单元包括支撑轴、导向杆、滑动架、电机二、电机三、丝杠,所述导向杆固定安装在支撑座二上,所述丝杠转动安装在支撑座二上,所述电机三安装在支撑座二上,所述电机三的输出轴和丝杠固定连接,所述滑动架滑动安装在导向杆上,所述滑动架和丝杠通过螺纹连接,所述电机二安装在滑动架上,所述支撑轴和滑动架转动连接,所述支撑轴和电机二的输出轴固定连接,所述土壤探测仪可拆卸地安装在支撑轴上。
13.进一步地,所述土壤探测仪上设置有钻头、湿度探测传感器、酸碱度探测传感器。
14.本实用新型与现有技术相比的有益效果是:(1)本实用新型能够模仿蜘蛛行走,同时通过在大腿支架和小腿机构之间设置限位组件,能够限制大腿支架和小腿机构所形成的角度,能够保证大腿支架和小腿机构在承载重物时不会趴在地上;(2)本实用新型通过绳索弹射组件能够模仿蜘蛛的吐丝功能,通过绳索弹射组件能够将连接头弹射出去,方便牵引物品,能够在遇到沟壑时,对沟壑两侧的物品进行输送;(3)本实用新型通过土壤探测组件能够对土壤进行湿度以及酸碱度检测,同时便于土壤探测仪的携带以及运输。
附图说明
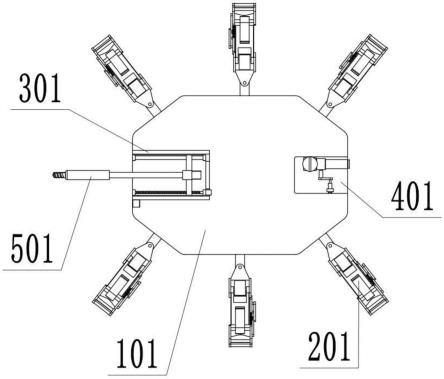
15.图1为本实用新型整体结构示意图一。
16.图2为本实用新型整体结构示意图二。
17.图3为本实用新型行走组件结构示意图一。
18.图4为本实用新型行走组件结构示意图二。
19.图5为本实用新型土壤探测组件结构示意图一。
20.图6为本实用新型土壤探测组件结构示意图二。
21.图7为本实用新型绳索弹射组件结构示意图。
22.图8为本实用新型绳索弹射组件局部结构示意图。
23.图9为本实用新型绳索弹射组件局部结构剖视图。
24.图10为本实用新型土壤探测仪结构示意图。
25.附图标号:101-支撑板;201-大腿支架;202-舵机一;203-支撑架一;204-舵机二;205-转动轴一;206-连杆一;207-连杆二;208-转动轴二;209-连杆三;210-小腿支架一;211-小腿支架二;212-转动轴三;213-从动齿轮;214-主动齿轮;215-舵机三;301-支撑座一;302-电机一;303-支撑座二;304-支撑轴;305-导向杆;306-滑动架;307-电机二;308-电机三;309-丝杠;401-支撑座三;402-支撑座四;403-转动轮;404-限位座;405-弹射箱;406-连接头;407-支撑座五;408-电缸;409-连接杆;410-卡杆;411-绳索;412-绕线轮;413-弹射杆;414-弹簧;501-土壤探测仪。
具体实施方式
26.下面结合具体实施例对本实用新型作进一步描述,在此实用新型的示意性实施例以及说明用来解释本实用新型,但并不作为对本实用新型的限定。
27.实施例:如图1-图10所示的一种仿生蜘蛛机器人,包括支撑板101,支撑板101上设置有程序控制组件,支撑板101的侧面安装有多个行走组件,支撑板101上安装有绳索弹射组件和土壤探测组件;行走组件包括大腿支架201、第一驱动单元、小腿机构、第二驱动单元,第一驱动单元安装在支撑板101上,大腿支架201安装在第一驱动单元上,第二驱动单元安装在大腿支架201上,小腿机构安装在第二驱动单元上,小腿机构和大腿支架201之间安装有限位组件;小腿机构包括小腿支架一210和小腿支架二211,小腿支架二211安装在第二驱动单元上,小腿支架一210固定安装在小腿支架二211上;限位组件包括连杆一206、连杆二207、连杆三209,连杆一206的一端转动安装在大腿支架201上,连杆三209的一端转动安装在小腿支架二211上,连杆一206的另一端与连杆三209的另一端转动连接,连杆三209上开有弧形槽,连杆二207的一端滑动安装在连杆三209上的弧形槽内,连杆二207的另一端转动安装在连杆一206上。
28.第一驱动单元包括舵机一202、支撑架一203,舵机一202固定安装在支撑板101上,支撑架一203固定安装在舵机一202的输出轴上,支撑架一203上固定安装有舵机二204,舵机二204的输出轴上固定安装有转动轴一205,转动轴一205和支撑架一203转动连接,大腿支架201固定安装在转动轴一205上,舵机一202与舵机二204呈十字形分布。
29.第二驱动单元包括转动轴二208、转动轴三212、从动齿轮213、主动齿轮214、舵机三215,舵机三215固定安装在大腿支架201内,转动轴二208固定安装在舵机三215的输出轴上,转动轴二208与大腿支架201转动连接,主动齿轮214固定安装在转动轴二208上,转动轴三212转动安装在大腿支架201上,小腿支架二211和从动齿轮213均固定安装在转动轴三212上,从动齿轮213与主动齿轮214啮合连接。
30.绳索弹射组件包括支撑座三401、弹射机构、绳索收放机构,弹射机构和绳索收放机构均安装在支撑座三401上,弹射机构和绳索收放机构连接。
31.绳索收放机构包括支撑座四402、转动轮403、绳索411、绕线轮412,支撑座四402固定安装在支撑座三401上,绕线轮412转动安装在支撑座四402内,绕线轮412与支撑座三401转动连接,绳索411呈卷状缠绕在绕线轮412上,绳索411的一端固定安装在绕线轮412上,绳索411的另一端与弹射机构连接,转动轮403转动安装在支撑座四402上,转动轮403与绕线轮412同轴固定安装。
32.弹射机构包括限位座404、弹射箱405、连接头406、支撑座五407、电缸408、连接杆409、卡杆410、弹射杆413、弹簧414,限位座404、弹射箱405、支撑座五407均固定安装在支撑座三401上,弹射箱405内设置有滑动腔一和滑动腔二,限位座404内设置有滑动腔三,弹射杆413滑动安装在滑动腔一内,弹射杆413与滑动腔三滑动连接,连接头406设置在滑动腔二内,弹簧414固定安装在连接杆409内,弹簧414设置在滑动腔二内,弹射杆413的一端与绳索411固定连接,连接头406可拆卸地安装在弹射杆413的另一端,弹射杆413与绳索411连接的一端设置有多个插销孔,电缸408固定安装在支撑座五407上,连接杆409固定安装在电缸408的活塞杆上,卡杆410固定安装在连接杆409上,卡杆410远离连接杆409的一端设置有插销,插销与插销孔相匹配。
33.土壤探测组件包括支撑座一301、升降单元、翻转单元、土壤探测仪501,支撑座一301可拆卸地安装在支撑板101上,翻转单元安装在支撑座一301上,升降单元安装在翻转单元上,土壤探测仪501可拆卸地安装在升降单元上。
34.翻转单元包括电机一302、支撑座二303,电机一302安装在支撑座一301上,电机一302的输出轴上固定安装有连接轴,连接轴与支撑座一301转动连接,支撑座二303固定安装在连接轴上。
35.升降单元包括支撑轴304、导向杆305、滑动架306、电机二307、电机三308、丝杠309,导向杆305固定安装在支撑座二303上,丝杠309转动安装在支撑座二303上,电机三308安装在支撑座二303上,电机三308的输出轴和丝杠309固定连接,滑动架306滑动安装在导向杆305上,滑动架306和丝杠309通过螺纹连接,电机二307安装在滑动架306上,支撑轴304和滑动架306转动连接,支撑轴304和电机二307的输出轴固定连接,土壤探测仪501可拆卸地安装在支撑轴304上;土壤探测仪501上设置有钻头、湿度探测传感器、酸碱度探测传感器。
36.本实用新型的工作原理为:通过舵机一202输出轴的转动带动支撑架一203转动,支撑架一203带动大腿支架201在水平方向上转动,大腿支架201带动小腿机构在水平方向上转动,通过舵机二204输出轴的转动带动大腿支架201在竖直方向上转动,大腿支架201带动小腿机构在竖直方向上转动;舵机三215的输出轴通过转动轴二208带动主动齿轮214转动,主动齿轮214通过从动齿轮213带动转动轴三212转动,转动轴三212带动小腿支架二211和小腿支架一210在竖直方向上转动,通过上述运动改变大腿支架201和小腿机构的位置,通过大腿支架201和小腿机构位置的改变带动支撑板101运动,从而能够模仿蜘蛛的行走。
37.通过在连杆三209上设置弧形槽,连杆二207在弧形槽内滑动,从而能够限制小腿机构和大腿支架201之间所形成的角度,能够防止当支撑板101上承载的重物过重时,将舵机三215的输出轴因压力过大导致损坏而发生转动,从而导致大腿支架201和小腿机构在压力作用下变成平行状态,能够防止大腿支架201和小腿机构趴在地上。
38.当需要使用本实用新型进行土壤探测时,将带有钻头的土壤探测仪501安装在支
撑轴304上,电机一302的输出轴通过连接轴带动支撑座二303转动,使支撑座二303转动到与支撑座一301垂直的位置,电机三308的输出轴带动丝杠309转动,丝杠309驱动滑动架306在导向杆305上滑动,滑动架306带动电机二307、支撑轴304、土壤探测仪501移动,同时电机二307的输出轴通过支撑轴304带动土壤探测仪501转动,土壤探测仪501在钻头的作用下伸入到地下,通过土壤探测仪501上的湿度探测传感器和酸碱度探测传感器对土壤进行湿度和酸碱度探测。
39.本实用新型能够模仿蜘蛛吐丝的功能,初始时,卡杆410上的插销插入弹射杆413上的插销孔中,连接头406为收回状态,即连接头406处于弹射箱405上的滑动腔二中,弹簧414为被压缩状态,绳索411呈卷状缠绕在绕线轮412上,当需要牵引物品或遇到沟壑需要输送物品时,绳索弹射组件启用,使用时,电缸408的活塞杆收缩,电缸408的活塞杆通过连接杆409带动卡杆410移动,从而使卡杆410上的插销从弹射杆413上的插销孔中移出,连接头406在弹簧414弹力的作用下从弹射箱405中弹出,连接头406带动弹射杆413移动,弹射杆413通过绳索411带动绕线轮412转动,绕线轮412带动转动轮403转动,将需要牵引或需要输送的物品固定在连接头406上。
40.当需要收回连接头406时,转动转动轮403,转动轮403带动绕线轮412转动,绕线轮412转动时带动绳索411缠绕,从而通过弹射杆413带动弹射杆413移动,当弹射杆413移动到接近弹射箱405的位置后,手动将弹射杆413沿着滑动腔一插入弹射箱405内,继续转动转动轮403,转动轮403带动绕线轮412转动,当绳索411完全被收回后,电缸408的活塞杆带动连接杆409移动,连接杆409带动卡杆410上的插销插入到弹射杆413上的插销孔中。
41.需要特别说明的是,上述动力件的控制均通过程序控制组件进行控制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1