转向装置的制作方法
本发明总体涉及一种转向装置,更具体地,涉及一种用于转向车辆的至少一个车轮的方向的转向装置。
背景技术:
1、线控转向(steer-by-wire)系统可以是一种方向盘和车辆的车轮之间不具有机械连接,并且通过电信号执行车辆车轮的转向的转向装置。在线控转向系统中,由于方向盘和车辆的车轮之间不具有机械连接,因此在减少车辆部件的数量、减轻重量、最小化转向组件的包装方面上具有优点。此外,由于线控转向系统是通过电信号执行转向的,因此在功能扩展性的方面上也是有利的。近来,随着积极开展车辆的电气化和自动驾驶技术的研发,对线控转向系统的需求也在增加。
2、在工作原理上,线控转向系统在用于提供转向反作用力的转向反作用力系统和用于调整实际车辆车轮的方向的负重轮转向系统之间不具有机械连接,因此,需要有高响应性的网络构成。此外,还需要实现用于满足较高的汽车安全完整性等级(automotivesoftware integrity level,asil)的电子控制单元、每个网络的独立性、系统级别的后退(fall back)概念。
3、现有技术文献
4、专利文献
5、专利文献1:韩国授权专利第2086428号“线控转向式转向装置”,授权日:2020年03月03日
技术实现思路
1、发明要解决的问题
2、本发明是为了解决上述现有技术中的问题而提出的,本发明的目的在于,提供一种具有满足线控转向系统所要求的高响应性和每个网络的独立性的网络构成的转向装置。
3、此外,本发明的另一目的在于,提供一种即使在线控转向系统的一个或一些部件发生故障的情况下,也能运行线控转向系统的转向装置。
4、本发明的问题不限于以上所提及的问题,本领域普通技术人员将通过以下记载明确理解其他未提及的问题。
5、用于解决问题的手段
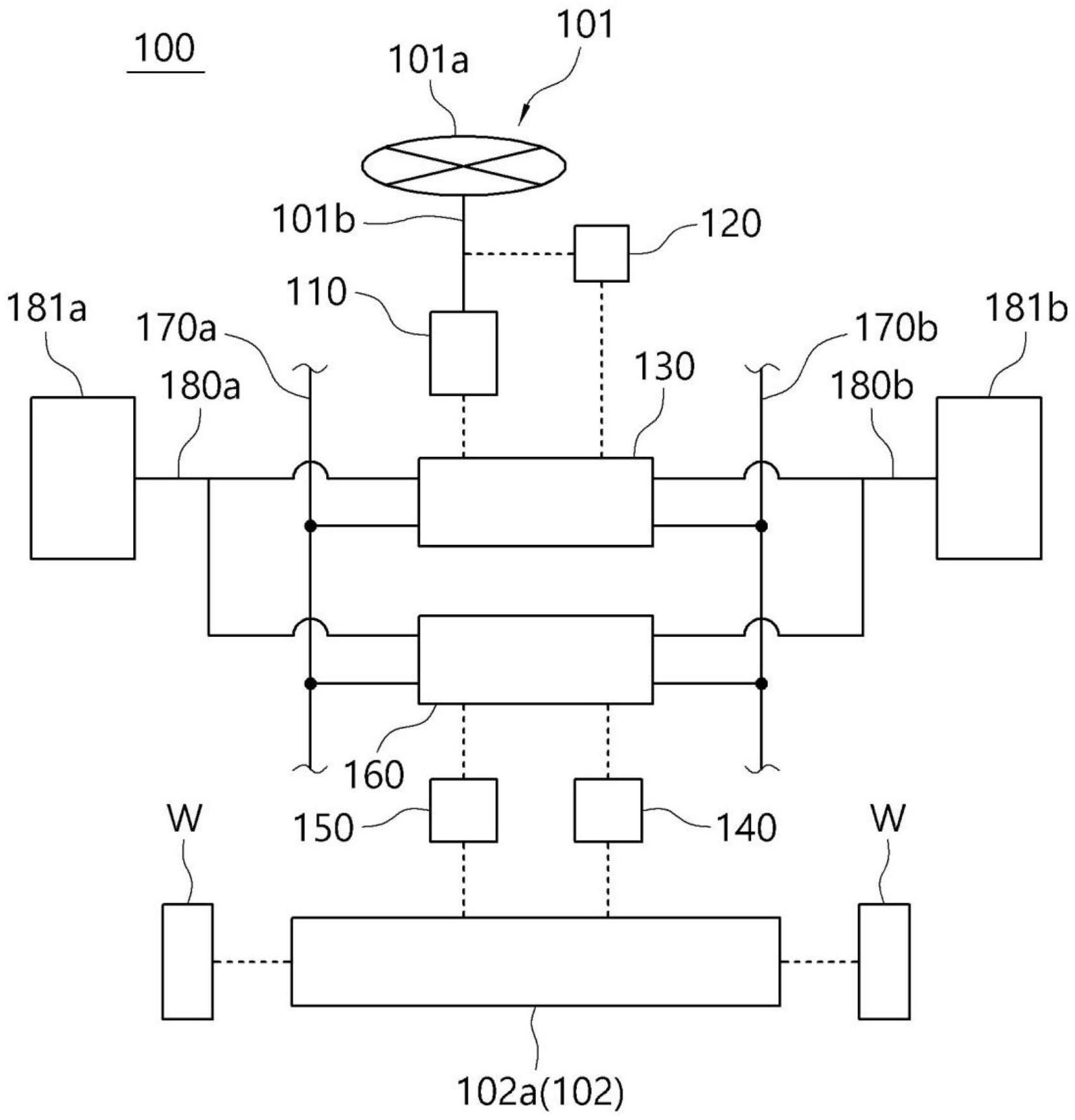
6、根据本发明的一个方面,提供一种转向装置,其包括:反作用力致动器,对由车辆的驾驶员操作的转向操作构件的工作产生反作用力;反作用力控制单元,基于由所述转向操作构件的工作所生成的电信号而控制所述反作用力致动器;转向致动器,驱动用于调整所述车辆的车轮的方向的转向机构;转向控制单元,基于所述电信号控制所述转向致动器;第一通信网络,连接到所述反作用力控制单元和所述转向控制单元,以向所述反作用力控制单元和所述转向控制单元发送控制相关信息;以及第二通信网络,独立于所述第一通信网络连接到所述反作用力控制单元和所述转向控制单元,并且能够向所述反作用力控制单元和所述转向控制单元发送所述控制相关信息。
7、此时,根据本发明的一个方面的转向装置,还可以包括:第一电源线,连接到所述反作用力控制单元和所述转向控制单元,以向所述反作用力控制单元和所述转向控制单元供应电力;以及第二电源线,独立于所述第一电源线而连接到所述反作用力控制单元和所述转向控制单元,以能够向所述反作用力控制单元和所述转向控制单元供应电力。
8、此外,根据本发明的一个方面的转向装置,还可以包括:第一电池,其与所述第一电源线连接,以向所述第一电源线供应电力;以及第二电池,其与所述第二电源线连接,以向所述第二电源线供应电力。
9、此外,根据本发明的一个方面的转向装置,还可以包括通信线路,所述通信线路直接连接所述反作用力控制单元和所述转向控制单元,以能够实现所述反作用力控制单元和所述转向控制单元之间的信息交换。
10、此外,根据本发明的一个方面的转向装置,还可以包括转向操作传感器,所述转向操作传感器测量与所述转向操作构件的工作相关的物理量并将该物理量提供给所述反作用力控制单元,所述电信号与所述物理量具有相关性。
11、此外,在根据本发明的一个方面的转向装置中,所述物理量可以包括所述转向操作构件工作时所产生的扭矩。
12、此外,根据本发明的一个方面的转向装置,还可以包括转向机构工作传感器,所述转向机构工作传感器测量所述转向机构的工作相关信息并将该工作相关信息提供给所述转向控制单元。
13、此外,在根据本发明的一个方面的转向装置中,所述转向机构可以包括线性移动构件,所述转向机构的工作相关信息包含所述线性移动构件的位置。
14、根据本发明的另一个方面,提供一种转向装置,其包括:反作用力致动器,对由车辆的驾驶员操作的转向操作构件的工作产生反作用力;第一反作用力控制单元,基于与所述转向操作构件的工作相关联的电信号而控制所述反作用力致动器;第二反作用力控制单元,与所述第一反作用力控制单元一起,或者在所述第一反作用力控制单元发生故障时代替所述第一反作用力控制单元,基于所述电信号控制所述反作用力致动器;转向致动器,驱动用于调整所述车辆的车轮方向的转向机构;第一转向控制单元,基于所述电信号控制所述转向致动器;第二转向控制单元,与所述第一转向控制单元一起,或者在所述第一转向控制单元发生故障时代替所述第一转向控制单元,基于所述电信号控制所述转向致动器;第一通信网络,连接到所述第一反作用力控制单元和所述第一转向控制单元,以向所述第一反作用力控制单元和所述第一转向控制单元发送控制相关信息;以及第二通信网络,连接到所述第二反作用力控制单元和所述第二转向控制单元,以向所述第二反作用力控制单元和所述第二转向控制单元发送控制相关信息。
15、此时,根据本发明的另一个方面的转向装置,还可以包括:第一电源线,连接到所述第一反作用力控制单元和所述第一转向控制单元,以向所述第一反作用力控制单元和所述第一转向控制单元供应电力;以及第二电源线,连接到所述第二反作用力控制单元和所述第二转向控制单元,以向所述第二反作用力控制单元和所述第二转向控制单元供应电力。
16、此外,根据本发明的另一个方面的转向装置,还可以包括:第一电池,其与所述第一电源线连接,以向所述第一电源线供应电力;以及第二电池,其与所述第二电源线连接,以向所述第二电源线供应电力。
17、此时,根据本发明的另一个方面的转向装置,还可以包括:第一通信线路,直接连接所述第一反作用力控制单元和所述第一转向控制单元,以能够实现所述第一反作用力控制单元和所述第一转向控制单元之间的信息交换;以及第二通信线路,直接连接所述第二反作用力控制单元和所述第二转向控制单元,以能够实现所述第二反作用力控制单元和所述第二转向控制单元之间的信息交换。
18、此外,根据本发明的另一个方面的转向装置,还可以包括:第一转向操作传感器,测量与所述转向操作构件的工作相关联的物理量并将该物理量提供给所述第一反作用力控制单元;以及第二转向操作传感器,测量与所述转向操作构件的工作相关联的物理量并将该物理量提供给所述第二反作用力控制单元,所述电信号与所述物理量具有相关性。
19、此外,在根据本发明的另一个方面的转向装置中,所述物理量可以包括所述转向操作构件工作时产生的扭矩。
20、此外,根据本发明的另一个方面的转向装置,还可以包括:第一转向机构工作传感器,测量所述转向机构的工作相关信息并将该工作相关信息提供给所述第一转向控制单元;以及第二转向机构工作传感器,测量所述转向机构的工作相关信息并将该工作相关信息提供给所述第二转向控制单元。
21、此外,在根据本发明的另一个方面的转向装置中,所述转向机构可以包括线性移动构件,所述转向机构的工作相关信息包含所述线性移动构件的位置。
22、此外,根据本发明的另一个方面的转向装置,还可以包括反作用力控制单元间通信线路,所述反作用力控制单元间通信线路直接连接所述第一反作用力控制单元和所述第二反作用力控制单元。
23、此外,根据本发明的另一个方面的转向装置,还可以包括转向控制单元间通信线路,所述转向控制单元间通信线路直接连接所述第一转向控制单元和所述第二转向控制单元。
24、此外,在根据本发明的另一个方面的转向装置中,所述第一反作用力控制单元可以生成针对所述反作用力致动器的控制命令,所述第二反作用力控制单元接收由所述第一反作用力控制单元所生成的控制命令以控制所述反作用力致动器,当所述第一反作用力控制单元发生故障时,所述第二反作用力控制单元生成针对所述反作用力致动器的控制命令。
25、此外,在根据本发明的另一个方面的转向装置中,所述反作用力致动器是用于产生反作用力的反作用力电机,针对所述反作用力致动器的控制命令可以包括针对所述反作用力致动器的扭矩控制命令。
26、此外,在根据本发明的另一个方面的转向装置中,所述第一转向控制单元生成针对所述转向致动器的控制命令,所述第二转向控制单元接收由所述第一转向控制单元所生成的控制命令以控制所述转向致动器,当所述第一转向控制单元发生故障时,所述第二转向控制单元生成针对所述转向致动器的控制命令。
27、此外,在根据本发明的另一个方面的转向装置中,所述转向致动器是用于驱动所述转向机构的驱动电机,针对所述转向致动器的控制命令可以包括针对所述转向致动器的扭矩控制命令。
28、发明效果
29、根据如上所述的构成,根据本发明的一些实施例的转向装置被配置为可以通过至少两个独立的通信网络来将控制命令分别发送至反作用力控制单元或控制器和转向控制单元或控制器,从而实现线控转向系统所要求的高响应性和每个网络的独立性。
30、此外,根据本发明的一些实施例的转向装置,提供与反作用力控制和转向控制相关的独立冗余(redundancy),从而即使在转向系统的一部分构成发生故障时,转向系统也能够正确地或准确地工作。
31、应当理解,本发明的效果不限于上述效果,并且包括可以从本发明的详细描述或权利要求中描述的本发明的配置推断的所有效果。
- 还没有人留言评论。精彩留言会获得点赞!