一种机器人爬行控制方法与流程
本发明涉及一种机器人的爬行控制方法,特别使用在树木分支的裁切或为电杆上安装作业的工人提供安装的部件。
背景技术:
1、电力电杆顾名思义就是架电线的杆,出现于各个农村-田野-马路-街道,是电力领域的重要基础设施之一,早期的各种电线杆,都是从木杆起步的,甚至包括电压等级不是太高的高压线电杆,后来由于钢铁和钢筋混凝土的发展,和技术上的要求,这两种材料代替了大部分木杆,而且适用的木材逐步稀缺,城市里面就基本上难见木杆了;但是在一些不太发达的地方架设电话线等还是使用木杆。
2、在电力电杆上部需要承载诸多电力部件,如横担、包箍、瓷瓶、线夹等等,该些部件重量不重,以往该些部件可以由安装工人携带在身上并攀爬电杆顶端进行安装,但当该电杆具有多组横担等时,即需要上、下往返几次,从而增加了一定的工作量。
3、另外,电力设施和电力线缆等经常安装在丛林中,由于树木的分支较多,有时会延伸至电力线缆和电线杆上,从而对电力设施造成一定的安全隐患,因此需要针对一些树木的分支进行切断,以往树木的分支都是由人工攀爬进行手工裁切,该项工作对工人的人身安全存在巨大的隐患。
4、目前检索到的中国专利“绿化苗木的自动修枝机 ,公开号 cn111386887a”,其包括安装架、升降爬树装置、树枝修理装置、控制器且升降爬树装置及与树枝修理装置均安装于安装架上,升降爬树装置用于使本爬树修枝机整体夹持设置于待修枝树木主干外部并且还可牵引本爬树修枝机整体沿树木主干轴向进行上升或下降运动,树枝修理装置用于按照需求对树木主干上的分支进行修理,控制器用于控制升降爬树装置与树枝修理装置内的电机运行;其只需工作人员辅助将本树枝修理机同轴安装于树木主干外部即可,后续过程只需工作人员通过操作控制器进而控制升降爬树装置及树枝修理装置内的电机运行即可实现对树木分支的切断修理,不仅降低了工作人员的劳动强度,还大大提高了工作人员的安全性;虽然该设备可以实现树木分支的裁切,但其要裁切高处的分支时,需要高处以下所有的分支进行裁切,就造成不会干扰电力设施的分支也被裁切,从而造成巨大的资源浪费和增加了裁切的时间。
5、
技术实现思路
1、鉴于现有技术的上述不足,本发明的目的在于提供一种机器人的爬行控制方法,该一种机器人的爬行控制方法能够在树木上攀爬,对影响电力设施的特定树木分支进行裁切,而不会裁切过多的树木分支,提高裁切效率;以及可以为电杆上安装作业的工人提供安装的部件。
2、为实现上述目的,本发明采用如下技术方案:
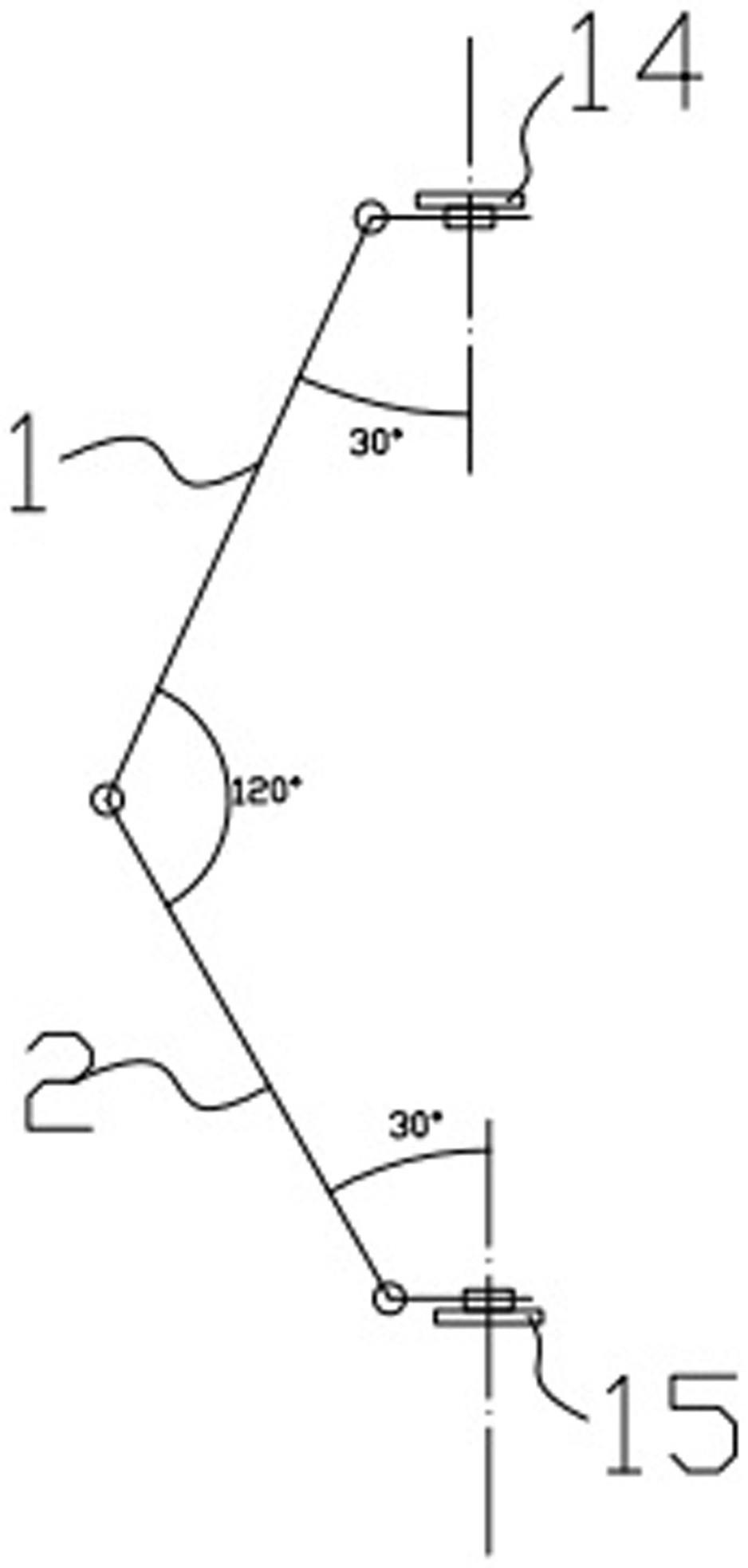
3、本发明机器人的爬行控制方法,其特征在于:包括两个相互转动铰接的第一摆臂和第二摆臂,第一摆臂和第二摆臂的铰接端通过第一电机驱动开合,第一摆臂和第二摆臂的自由端分别转动铰接有第一安装座和第二安装座,第一摆臂的自由端与第一安装座通过第二电机驱动两者相对转动,第二摆臂的自由端与第二安装座通过第三电机驱动两者相对转动,第一安装座上安装有第一舵机和连接在第一舵机输出轴上的第一支座,第二安装座上安装有第二舵机和连接在第二舵机输出轴上的第二支座,第一支座上安装有第一机械夹爪,第二支座上安装有第二机械夹爪;在第一摆臂、第二摆臂或它们的铰接处安装有锯切设备或盛料筐;
4、在机器人初始状态时,第一摆臂与第二摆臂相互摆转至形成120度的夹角,第一机械夹爪与第二机械夹爪处于张开状态,且第一机械夹爪与第二机械夹爪分别围抱形成柱形的第一轴心线和第二轴心线,第一轴心线与第二轴心线平行或同轴,第一摆臂与第一轴心线30度夹角,第二摆臂与第二轴心线30度夹角;
5、开始工作时,将该机器人搬移至待攀爬的树干或电杆的地面上,翻转摆正机器人,使张开状态的第一机械夹爪与第二机械夹爪环抱在树干或电杆的外围,先使位于高位的第一机械夹爪夹持住树干或电杆的外表面;
6、接着启动第一电机、第二电机、第三电机工作,第一步,使第一摆臂与第一轴心线由30度夹角变为60度夹角,第二步,使第一摆臂与第二摆臂由120度夹角变为90度夹角,第三步,使第一摆臂与第一轴心线由60度夹角变为75度夹角,第四步,使第一摆臂与第二摆臂由90度夹角变为30度夹角,第五步,使第二摆臂与第二轴心线由30度夹角变为75度夹角,即使第一机械夹爪与第二机械夹爪此时分别围抱形成柱形的第一轴心线和第二轴心线平行或同轴,此时使位于低位的第二机械夹爪夹持住树干或电杆的外表面,上述步骤完成第一个上升动作;
7、然后使位于高位的第一机械夹爪张开,位于低位的第二机械夹爪保持夹持住树干或电杆的外表面,启动第一电机、第二电机、第三电机工作,第一步,使第一摆臂与第二摆臂由30度夹角变为90度夹角,第二步,使第二摆臂与第二轴心线由75度夹角变为60度夹角,第三步,使第一摆臂与第二摆臂由90度夹角变为120度夹角,第四步,使第二摆臂与第二轴心线由60度夹角变为30度夹角,第五步,使第一摆臂与第一轴心线由60度夹角变为30度夹角,上述步骤完成第二个上升动作;
8、后续攀爬时,依照上述第一个上升动作与第二个上升动作进行,直至达到预定高度;
9、在上述两个上升攀爬过程中,如果机器人的部件遇到树木分支或电杆上的横担的干涉而无法上升,那么启动第一舵机或第二舵机,使机器人的部件避让树木分支或电杆上的横担。
10、进一步的,上述第一支座设有由第四电机驱动转动的第一丝杆螺母机构,所述第一丝杆螺母机构的第一螺母块滑动连接在第一支座的第一滑道上,所述第一丝杆螺母机构的第一丝杆与第一螺母块螺纹连接,且第一丝杆的端头穿出第一支座并连接有第一齿轮,所述第四电机的输出轴端部设有与第一齿轮啮合传动的第二齿轮。
11、进一步的,上述第一螺母块两侧伸出第一滑道的位置上转动铰接有第一转动杆,第一转动杆的自由端转动铰接有第二转动杆,第二转动杆的自由端上转动铰接有第一卡爪,在第二转动杆与第一支座之间连接有第一连杆,所述第一支座上设有第二卡爪。
12、进一步的,上述第一卡爪和第二卡爪均为90度弯折形成的金属板片,所述第一卡爪与第二卡爪的转动轴心线相互平行。
13、进一步的,上述第二支座设有由第五电机驱动转动的第二丝杆螺母机构,所述第二丝杆螺母机构的第二螺母块滑动连接在第二支座的第二滑道上,所述第二丝杆螺母机构的第二丝杆与第二螺母块螺纹连接,且第二丝杆的端头穿出第二支座并连接有第三齿轮,所述第五电机的输出轴端部设有与第三齿轮啮合传动的第四齿轮。
14、进一步的,上述第二螺母块两侧伸出第二滑道的位置上转动铰接有第三转动杆,第三转动杆的自由端转动铰接有第四转动杆,第四转动杆的自由端上转动铰接有第三卡爪,在第四转动杆与第二支座之间连接有第二连杆,所述第二支座上设有第四卡爪。
15、进一步的,上述第三卡爪和第四卡爪均为90度弯折形成的金属板片,所述第三卡爪和第四卡爪的转动轴心线相互平行。
16、进一步的,上述第一电机的机体固定在第一摆臂上,第一电机的输出轴与第二摆臂固定连接。
17、进一步的,上述第一摆臂的铰接端具有u形槽,第二摆臂的铰接端伸入u形槽中,u形槽的壁体上设有穿孔,所述第二摆臂伸入u形槽的壁体上设有花键槽,第一电机的输出轴具有与花键槽插配的花键,第一电机的输出轴与穿孔间隙配合,第一电机的机体固定在u形槽的壁体上。
18、进一步的,上述第二摆臂的铰接端侧壁与u形槽壁体之间挤压设有套接在第一电机输出轴上的橡胶摩擦片。
19、进一步的,上述第一安装座和第二安装座均包括第一侧板和垂直于第一侧板的第一横板,所述第一摆臂的自由端与第一安装座的第一侧板转动铰接,其中第二电机机体固定在第一摆臂的自由端上,第二电机的输出轴与第一安装座的第一侧板固定连接;所述第二摆臂的自由端与第二安装座的第一侧板转动铰接,其中第三电机机体固定在第二摆臂的自由端上,第三电机的输出轴与第二安装座的第一侧板固定连接,所述第一横板上固定连接第一舵机或第二舵机的机体。
20、本发明一种机器人的爬行控制方法能够在攀爬过程中通过第一舵机或第二舵机相对第一支座、第二支座的相对旋转,从而以此来越过不必要切断的树木分支,从而减少切割树木分支的数量和提高切割效率;在攀爬电杆时也可以越过障碍的横担等,从而满足使用需要。
21、
- 还没有人留言评论。精彩留言会获得点赞!