一种电动助力转向控制方法、装置、车辆及可读存储介质与流程
本发明涉及车辆控制,尤其涉及一种电动助力转向控制方法、装置、车辆及可读存储介质。
背景技术:
1、目前汽车行业正在经历着一个重要变革期,车辆电动化和智能化已成为必然趋势。受限智能驾驶技术发展与法律法规的限制,完全的无人自动驾驶还不能在短期内真正实现商业化落地。因此绝大多数的汽车仍是搭载sae level3(society of automotiveengineers,国际汽车工程学会)以下的辅助驾驶功能为主。根据国际汽车工程学会对自动驾驶等级的划分,level3级及其以下的自动驾驶辅助功能是以人为车辆驾驶主体的辅助功能,智能驾驶系统是车辆驾驶的次要部分。
2、在智能辅助驾驶的复杂环境工况下,驾驶员、智能辅助驾驶系统如何合理的分工配合是一个重要的话题。
3、现有技术中,通过冗余的机械结构实现人机共驾,对车辆转向系统的结构进行了设计,在转向管柱上增加电磁离合器和电磁制动器,用于切断驾驶员转向输入,防止由于驾驶员不适合驾驶或误操作导致的车辆自主转向中断或车辆安全性问题,但是控制系统复杂,冗余的机械结构增加了成本。
技术实现思路
1、本发明的目的之一在于提供一种电动助力转向控制方法,以解决现有技术中的通过冗余的机械结构实现人机共驾成本较高的问题;目的之二在于提供一种电动助力转向控制装置;目的之三在于提供一种车辆;目的之四在于提供一种可读存储介质。
2、为了实现上述目的,本发明采用的技术方案如下:
3、一种电动助力转向控制方法,包括:
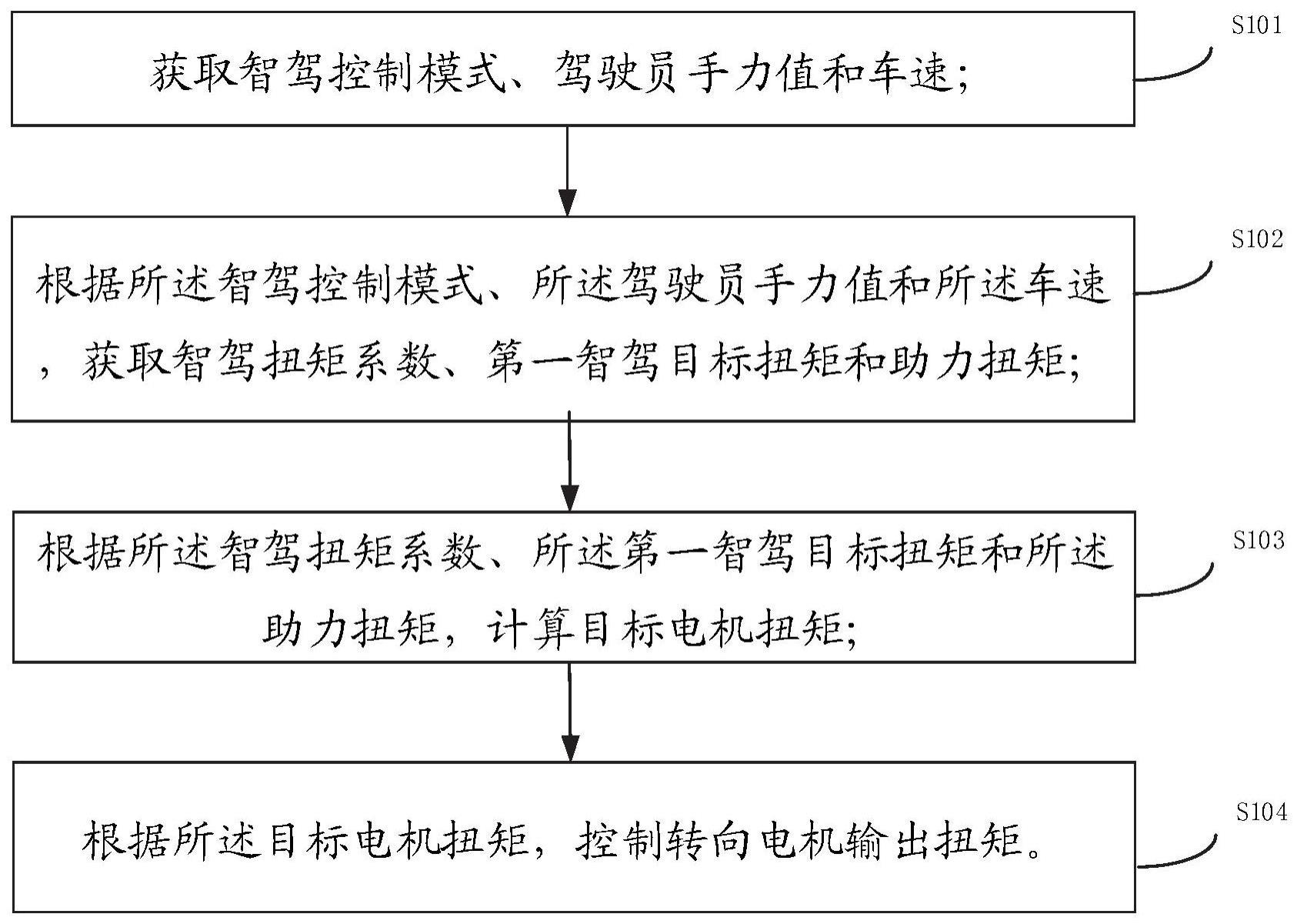
4、获取智驾控制模式、驾驶员手力值和车速;
5、根据所述智驾控制模式、所述驾驶员手力值和所述车速,获取智驾扭矩系数、第一智驾目标扭矩和助力扭矩;
6、根据所述智驾扭矩系数、所述第一智驾目标扭矩和所述助力扭矩,计算目标电机扭矩;
7、根据所述目标电机扭矩,控制转向电机输出扭矩。
8、本技术实施例提供了一种电动助力转向控制方法,通过获取智驾控制模式,驾驶员手力值和车速;根据智驾控制模式、驾驶员手力值和车速,获取智驾扭矩系数、第一智驾目标扭矩和助力扭矩;根据智驾扭矩系数、第一智驾目标扭矩和助力扭矩,计算目标电机扭矩;根据目标电机扭矩,控制转向电机输出扭矩。这样,根据驾驶控制模式、驾驶员手力值和车速,可以调节智能辅助驾驶系统相关的第一目标扭矩和智驾扭矩系数,以及调节驾驶员的控制端相关的助力扭矩,进而通过扭矩调节的方法实现人机共驾下控制权的转移,不需要通过冗余的机械结构,降低了人机共驾的控制成本。
9、进一步,所述根据所述智驾扭矩系数、所述第一智驾目标扭矩和所述助力扭矩,计算目标电机扭矩的步骤,包括:
10、计算所述智驾扭矩系数与所述第一智驾目标扭矩之积,获取第二智驾目标扭矩;
11、计算所述第二智驾目标扭矩与所述助力扭矩之和,获取所述目标电机扭矩。
12、根据上述技术手段,第二智驾目标扭矩为智驾扭矩系数与第一智驾目标扭矩之积,可以通过智驾扭矩系数和第一智驾目标同时调节第二智驾目标扭矩,实现冗余调节,提高了安全性。
13、进一步,所述智驾控制模式包括非紧急控制模式和紧急控制模式;
14、所述根据所述智驾控制模式、所述驾驶员手力值和所述车速,获取智驾扭矩系数的步骤,包括:
15、在所述非紧急控制模式下,根据所述驾驶员手力值和所述车速,获取所述智驾扭矩系数;
16、在所述紧急控制模式下,获取所述智驾扭矩系数为1。
17、根据上述技术手段,在所述非紧急控制模式下,当驾驶员手力值增加时,智驾扭矩系数减小,第二智驾目标扭矩减小,进而实现控制权向驾驶员转移;在所述紧急控制模式下,智驾扭矩系数不会因驾驶员手力值变化而变化,一定程度上避免驾驶员的控制端的干扰。
18、进一步,所述根据所述智驾控制模式、所述驾驶员手力值和所述车速,获取第一智驾目标扭矩的步骤包括:
19、根据所述智驾控制模式、所述驾驶员手力值和所述车速,获取比例参数增益系数和积分参数增益系数;
20、获取目标方向盘角度、实际方向盘角度和实际方向盘转速;
21、根据所述比例参数增益系数、所述积分参数增益系数、所述目标方向盘角度、所述实际方向盘角度和所述实际方向盘转速,获取所述第一智驾目标扭矩。
22、根据上述技术手段,可以实现第一智驾目标扭矩的获取。
23、进一步,所述根据所述智驾控制模式、所述驾驶员手力值和所述车速,获取比例参数增益系数和积分参数增益系数的步骤包括:
24、在所述非紧急控制模式下,根据所述驾驶员手力值和所述车速,获取所述比例参数增益系数和所述积分参数增益系数;所述比例参数增益系数和所述积分参数增益系数分别和所述驾驶员手力值负相关;
25、在所述紧急控制模式下,获取所述比例参数增益系数为1,并且获取所述积分参数增益系数为1。
26、根据上述技术手段,保证了在所述非紧急控制模式下,当驾驶员手力值增加时,比例参数增益系数和积分参数增益系数减小,第一智驾目标扭矩减小,第二智驾目标扭矩减小,进而实现控制权向驾驶员转移;当驾驶员手力值减小时,比例参数增益系数和积分参数增益系数增大,第一智驾目标扭矩增大,第二智驾目标扭矩增大,进而实现控制权向智能辅助驾驶系统转移;在所述紧急控制模式下,所述比例参数增益系数为1,所述积分参数增益系数为1,比例参数增益系数和积分参数增益系数不会因驾驶员手力值变化而变化,一定程度上避免驾驶员的控制端的干扰。
27、进一步,所述根据所述智驾控制模式,获取助力扭矩的步骤,包括:
28、获取助力曲线;
29、根据所述智驾控制模式、所述驾驶员手力值、所述车速和所述助力曲线,获取所述助力扭矩。
30、根据上述技术手段,可以实现助力扭矩的获取。
31、进一步,所述根据所述智驾控制模式、所述驾驶员手力值、所述车速和所述助力曲线,获取所述助力扭矩的步骤,包括:
32、在所述非紧急控制模式下,根据所述驾驶员手力值、所述车速和所述助力曲线,获取所述助力扭矩;
33、在所述紧急控制模式下,获取所述助力扭矩为0。
34、根据上述技术手段,保证了在所述紧急控制模式下,助力扭矩为0,转向电机不会受到驾驶员的控制端的干扰。
35、一种电动助力转向控制装置,包括:
36、参数获取模块,用于获取智驾控制模式,驾驶员手力值和车速;
37、参数计算模块,用于根据所述智驾控制模式、所述驾驶员手力值和所述车速,获取智驾扭矩系数、第一智驾目标扭矩和助力扭矩;
38、目标电机扭矩计算模块,用于根据所述智驾扭矩系数、所述第一智驾目标扭矩和所述助力扭矩,计算目标电机扭矩;
39、转向电机控制模块,用于根据所述目标电机扭矩,控制转向电机输出扭矩。
40、一种车辆,包括电动助力转向控制装置,所述电动助力转向控制装置包括处理器、存储器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序时实现上述任一所述的电动助力转向控制方法。
41、一种计算机可读存储介质,所述计算机可读存储介质上存储程序,当处理器执行所述程序时实现上述任意一项所述的方法的步骤。
42、本发明的有益效果:
43、本发明通过获取智驾控制模式,驾驶员手力值和车速;根据智驾控制模式、驾驶员手力值和车速,获取智驾扭矩系数、第一智驾目标扭矩和助力扭矩;根据智驾扭矩系数、第一智驾目标扭矩和助力扭矩,计算目标电机扭矩;根据目标电机扭矩,控制转向电机输出扭矩。这样,根据驾驶控制模式、驾驶员手力值和车速,可以调节智能辅助驾驶系统相关的第一目标扭矩和智驾扭矩系数,以及调节驾驶员的控制端相关的助力扭矩,进而通过扭矩调节的方法实现人机共驾下控制权的转移,不需要通过冗余的机械结构,降低了人机共驾的控制成本。
- 还没有人留言评论。精彩留言会获得点赞!