一种可变缩放比例的腿足行走装置及缩放比例变换方法
本发明涉及行走机构,具体涉及一种可变缩放比例的腿足行走装置及缩放比例变换方法。
背景技术:
1、目前典型的腿足行走装置构型有开链铰接式、笛卡尔坐标系式和闭链定比例缩放式。上述腿部构型被广泛应用于腿足式运载平台和腿足式机器人,并在抢险救灾、山地运输、森林消防、军事作战等领域中发挥着重要的作用。但现有构型也存在着步行控制难度大,能量利用效率低和峰值功率需求大的问题。
技术实现思路
1、针对上述问题,本发明公开一种可变缩放比例的腿足行走装置及缩放比例变换方法,能够提高能量的利用效率,降低峰值功率需求,并且能够在保证步行稳定的基础上易于控制。
2、本发明的技术方案如下:
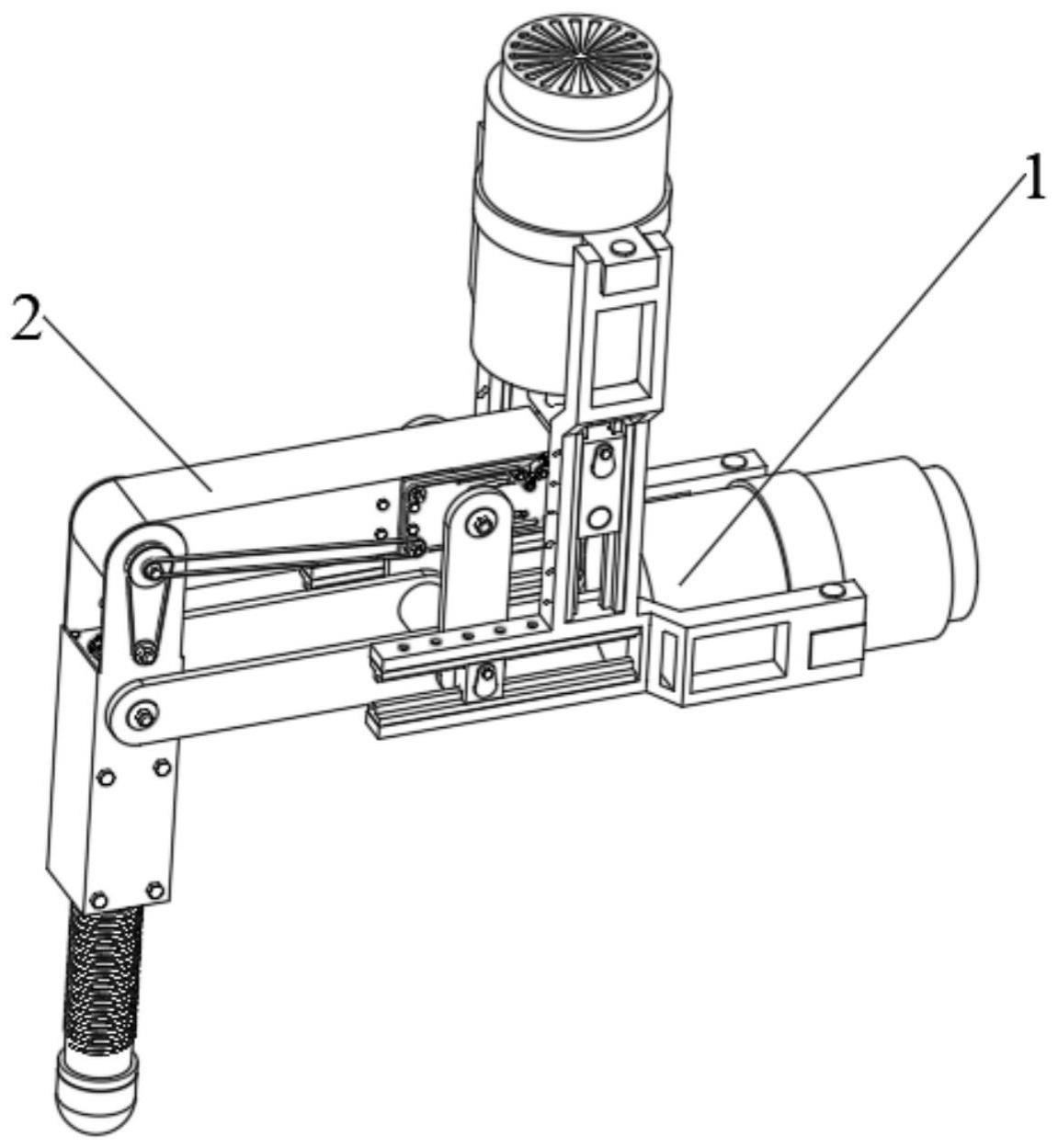
3、一种可变缩放比例的腿足行走装置,包括:机体总成和连杆总成;
4、所述机体总成包括机架、水平驱动器、竖直驱动器、竖直滑块、水平滑块、水平导轨和竖直导轨,水平驱动器和竖直驱动器都带有可伸缩的活塞杆,
5、水平滑块滑动安装在水平导轨上,水平滑块一端连接水平驱动器的活塞杆,另一端连接连杆总成,
6、竖直滑块滑动安装在竖直导轨上,竖直滑块一端连接竖直驱动器的活塞杆,另一端连接连杆总成;
7、所述连杆总成包括大腿模块、非线性传动模块、一级传动带、二级传动带、小腿模块、长连杆、水平驱动轴和短连杆,
8、所述大腿模块一端和竖直滑块铰接,另一端和小腿模块铰接;所述大腿模块两侧有阶梯轴,分别和一短连杆铰接,且一侧的阶梯轴上还套设非线性传动模块并局部固定,所述非线性传动模块位于该侧短连杆的内侧;
9、所述短连杆一端和大腿模块以及非线性传动模块共同铰接,另一端和水平驱动轴铰接;
10、所述长连杆一端和小腿模块铰接,另一端和水平驱动轴铰接;
11、所述水平驱动轴穿过水平滑块中间的轴孔,一端固定在水平滑块上,在水平驱动轴上穿设长连杆、短连杆和水平驱动器的活塞杆;
12、所述小腿模块两侧有阶梯轴,分别和一长连杆铰接;
13、所述一级传动带连接在非线性传动模块上的主动阶梯带轮与小腿模块上的从动阶梯带轮之间,所述从动阶梯带轮安装在小腿大腿连接轴上;
14、所述二级传动带连接在小腿模块上的从动阶梯带轮和带轮之间;
15、所述大腿模块、小腿模块自身都具有两段可相对伸缩和旋转的机构;
16、所述非线性传动模块上设置有可移动的滑板和滚轮、同步带,所述大腿模块带动滑板运动,所述滑板带动滚轮运动,所述滚轮带动同步带运动,所述同步带带动主动阶梯带轮运动。
17、进一步地:
18、所述大腿模块分为大腿杆上段和大腿杆下段;
19、所述大腿杆上段两侧的阶梯轴与竖直滑块铰接;
20、所述大腿杆下段两侧的阶梯轴上各铰接一所述短连杆;
21、所述大腿杆上段、大腿螺纹轴均可伸进所述大腿杆下段内;
22、所述大腿杆上段和大腿杆下段之间设置大腿花键轴、大腿螺纹轴,一调整电机安装于所述大腿杆上段端部,电机输出轴和大腿花键轴连接,所述大腿花键轴与大腿螺纹轴内部花键配合,大腿螺纹轴外部与大腿杆上段通过螺纹配合;
23、所述大腿杆上段通过螺钉穿过大腿杆下段侧面的安装槽与滑板进行固定。
24、进一步地:
25、所述大腿螺纹轴为阶梯轴,两个大腿圆锥滚子轴承分别套设在大腿螺纹轴的两个轴颈上,将轴环夹在两个大腿圆锥滚子轴承之间;
26、大腿轴承座插在大腿杆下段内部并固定,大腿轴承座端部连接大腿轴承端盖;
27、大腿轴承座中间有凹槽,所述大腿圆锥滚子轴承安装在所述凹槽内,一个大腿圆锥滚子轴承的轴承外圈端面顶在大腿轴承座的凹槽底面上,另一个大腿圆锥滚子轴承的轴承外圈端面顶在大腿轴承端盖上;
28、两个大腿圆锥滚子轴承的轴承内圈端面分别顶在大腿螺纹轴的两个轴肩上。
29、进一步地:
30、所述非线性传动模块设置有安装板,所述安装板固定于大腿杆上段侧面,所述安装板上有调整槽、横向滑槽、滑板导向槽;
31、所述安装板上正面安装有大带轮、带轮固定块、带轮压板、主动阶梯带轮、小带轮、滚轮和同步带,反面安装有滑板,滑板夹在安装板和大腿杆下段之间;
32、所述同步带内侧缠绕在三个大带轮、两个小带轮和主动阶梯带轮上,外侧缠绕在两个滚轮上,并且被夹在两组带轮固定块和带轮压板之间;
33、所述滑板上带有小带轮安装轴和带轮固定块安装轴和纵向滑槽,所述小带轮安装轴和带轮固定块安装轴穿过安装板的横向滑槽后分别套设小带轮和带轮固定块;
34、滚轮轴穿过滑板的纵向滑槽和安装板的调整槽;
35、所述滑板导向槽为矩形槽,与滑板配合,限制滑板位置。
36、进一步地:
37、所述滑板有两个,且互为镜像结构,一个滑板通过螺钉和大腿杆上段连接,在滑板导向槽内滑动;另一个滑板不与大腿杆上段连接,能在同步带的带动下在滑板导向槽内滑动。
38、进一步地:
39、所述调整槽中心线与横向滑槽的中心线为非线性函数对应关系,调整槽给滚轮轴提供导向,使滚轮轴沿着调整槽做曲线运动。
40、进一步地:
41、所述滚轮轴为阶梯轴,滚轮轴的一端夹在滑板和大腿杆下段之间,滚轮轴的轴肩上套设滚轮,轴向通过螺母限位;
42、主动阶梯带轮轴为阶梯轴,中间的轴颈上套设主动阶梯带轮,轴向通过螺母限位;
43、所述大带轮三个,分布在矩形安装板的三个角上;
44、带轮压板通过螺栓固定在带轮固定块上。
45、进一步地:
46、所述小腿模块分为小腿杆上段和小腿杆下段,
47、所述小腿杆上段一端和大腿模块铰接,
48、所述小腿杆上段两侧铰接所述长连杆,
49、所述小腿杆上段安装传动轴,传动轴上固定有带轮和主动锥齿轮,
50、主动锥齿轮和从动锥齿轮啮合,所述从动锥齿轮固定在锥齿轮固定架上,所述锥齿轮固定架连接在小腿花键轴一端,
51、所述小腿杆上段两侧连接小腿轴承座,
52、小腿杆下段内部与小腿花键轴花键配合,
53、小腿杆下段外部与小腿轴承座螺纹配合。
54、一种可变缩放比例的腿足行走装置的缩放比例变换方法,其特征在于,
55、设置初始条件如下:
56、铰点a为大腿杆上段和竖直滑块的铰接点,
57、铰点b为长连杆、短连杆和水平驱动器活塞杆的铰接点,
58、点c为小腿杆下段底部足端,
59、铰点d为大腿杆下段和短连杆的铰接点,
60、铰点e为大腿模块和小腿模块的铰接点,
61、铰点f为小腿杆上段和长连杆的铰接点,
62、则,ae对应大腿模块长,ce对应小腿模块长,bd对应短连杆长,bf对应长连杆长;
63、保证bdef是平行四边形,且a、b、c在一条线上,则大小腿的比例缩放特性存在,缩放比例k为:
64、
65、设ad长度为a,cf的长度为b,由于ef和de长度为定值,所以ef和de长度的乘积为常数c,ad和cf的乘积也为常数c;
66、设ad长度最短为a0,最长为a1,ad长度改变量为δa,主动阶梯带轮与同步带配合部分半径为r,
67、当满足如下条件:
68、(1)ad长度由a0增加δa时,所述大腿杆下段带动非线性传动模块的滑板在大腿杆上段移动距离δa,调整滚轮沿与δa移动方向垂直的方向移动:
69、
70、(2)主动阶梯带轮至从动锥齿轮传动比为:
71、(3)小腿下段螺纹导程为:2πr;
72、即可实现缩放比例调整。
73、与现有技术相比,本发明的有益效果体现在:
74、1.本发明提出的可变缩放比例的腿足行走装置,将水平驱动和竖直驱动分离,实现了腿足行走系统在矢状面内的运动解耦,易于步行控制的实现;
75、2.本发明提出的可变缩放比例的腿足行走装置,只需要一个调整驱动器,通过非线性机械传动机构,就可以调节大腿模块和小腿模块的长度,实现行走装置的缩放比例调整;
76、3.本发明提出的可变缩放比例的腿足行走装置,能够在一定范围内调整缩放比例,实现腿足式机器人的多模式行走运动,在空载和轻载工况下能够高抬腿、大跨度迈步快速行走,在重载工况下能够低抬腿、小跨度迈步稳健行走,提高了整机的能量利用效率并降低系统峰值功率。
- 还没有人留言评论。精彩留言会获得点赞!