一种巡检机器人的拐弯防跌落方法及巡检机器人与流程
本发明涉及巡检设备,尤其涉及一种巡检机器人的拐弯防跌落方法及巡检机器人。
背景技术:
1、目前随着智能变电站建设的加快,机器人逐渐被用于变电站巡检,大大减轻了值班人员的工作量。巡检机器人在执行巡检任务时在巡检道路上行走,巡检道路的宽度一般为80cm,高出变电站地面5cm。由于巡检道路的宽度较狭窄且高出表电站地面高度较高,巡检器人在巡检道路的直角弯道拐弯时容易跌落巡检道路无法自己脱困,需要值班人员到现场扶起,增加了值班人员的工作量。
2、经分析,导致巡检机器人跌落巡检道路的原因是:变电站现场存在一次设备和其他厂家的无线通信设备,这些设备会对巡检机器人的无线通信信号存在干扰导致间歇性通信延时,一但发生通信延时将会导致巡检机器人不受后台机控制,直接冲出巡检道路并掉落巡检道路,甚至有可能撞向巡检道路两侧的设备,存在安全隐患。
技术实现思路
1、本发明的一个目的在于:提供一种巡检机器人的拐弯防跌落方法,其能防止巡检机器人跌落巡检道路,提高巡检机器人使用的安全性。
2、本发明的另一个目的在于:提供一种巡检机器人,其安全性高。
3、为达到此目的,本发明采用以下技术方案:
4、一方面,提供一种巡检机器人的拐弯防跌落方法,所述巡检机器人包括车体以及四个组触发组件,四个所述触发组件中的其中两者分别设置在所述车体前端的左、右两侧,另外两者分别设置在所述车体后端的左、右两侧,当所述车体到达巡检道路的边缘时,所述触发组件能够被触发,设定所述车体右拐时所述车体后端的左侧所述触发组件与所述巡检道路左侧边缘之间的安全间距d1、设定所述车体左拐时所述车体后端的右侧所述触发组件与所述巡检道路右侧之间的安全间距d2以及分别在所述巡检道路上划出右拐安全位置和左拐安全位置,所述右拐安全位置与所述巡检道路左侧边缘之间间距以及所述左拐安全位置与所述巡检道路右侧边缘之间间距均为d3,包括以下步骤:
5、步骤s10、所述车体拐弯前,获取所述车体的位置信息,得到所述车体的第一位置,并判断所述巡检机器人需要拐弯的方向,若所述巡检机器人需要向右拐弯,则执行步骤s20,若所述巡检机器人需要向左拐弯,则执行步骤s30;
6、所述步骤s20包括以下步骤:
7、步骤s21、调整所述车体后端的位置,得到第二位置,所述第二位置上的所述车体后端的左侧所述触发组件与所述巡检道路的左侧边缘之间的间距为d4,d4≥d1;
8、步骤s22、将所述巡检机器人从所述第二位置向前直行,当所述车体前端的左和/或右所述触发组件被触发时所述车体停止,然后将所述车体直线后退距离d5,d5=d3,再将所述巡检机器人向右拐弯;
9、所述步骤s30包括以下步骤:
10、步骤s31、调整所述车体后端的位置,得到第三位置,所述第三位置上的所述车体后端的右侧所述触发组件与所述巡检道路的右侧边缘之间的间距为d6,d6≥d2;
11、步骤s32、将所述巡检机器人从所述第三位置向前直行,当所述车体前端的左或右所述触发组件被触发时所述车体停止,然后将所述车体直线后退距离d7,d7=d3,再将所述巡检机器人向左拐弯。
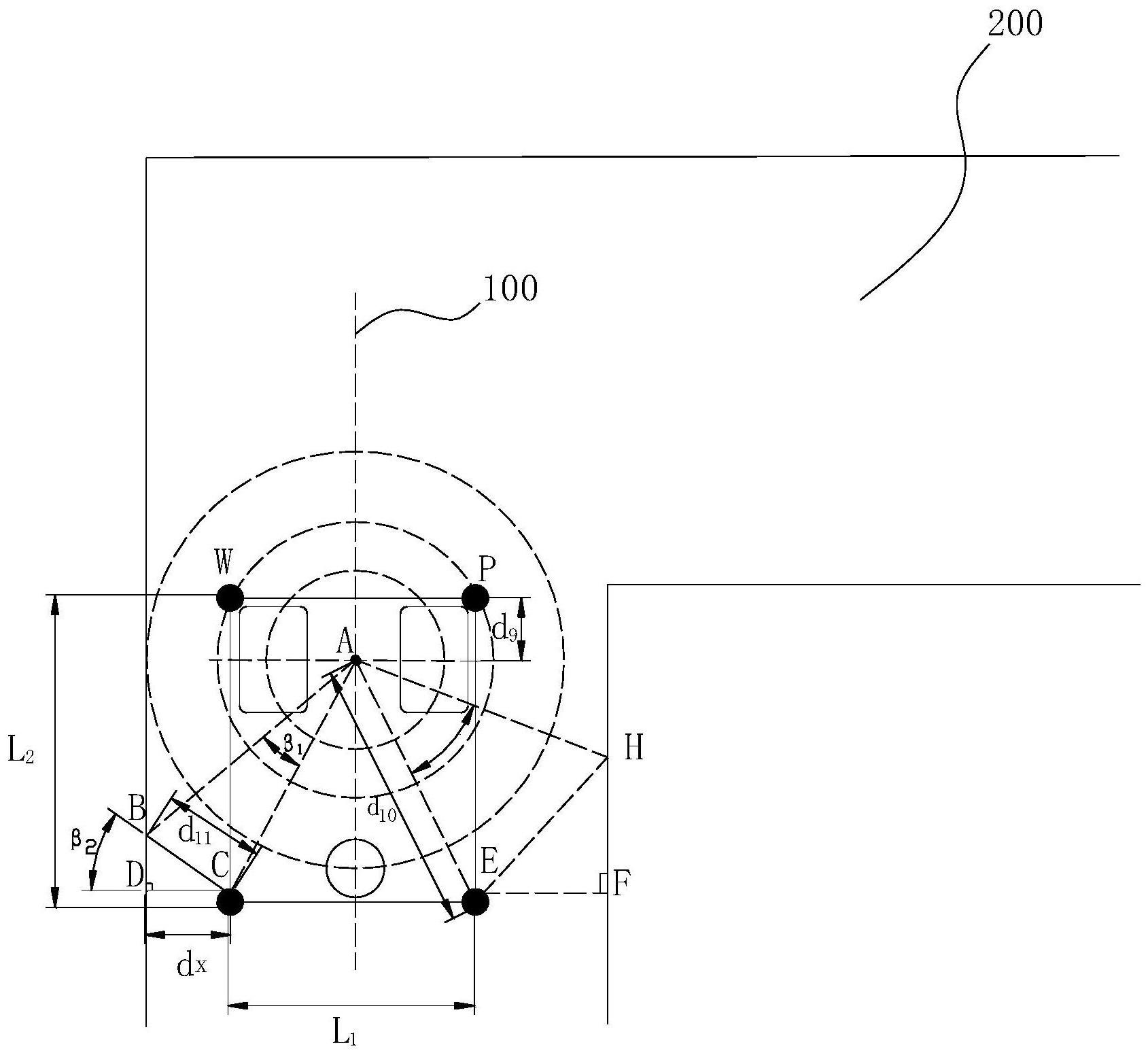
12、作为所述的巡检机器人的拐弯防跌落方法的一种优选的技术方案,在所述步骤s10之前,确定所述车体的转动中心点、获取车体的前左轮中心或前右轮中心与所述转动中心点的间距d8、获取所述车体后端左、右两组所述触发组件之间的间距l1、获取所述车体前端的左侧所述触发组件与所述车体后端的左侧所述触发组件之间的间距l2以及获取前左轮中心与前右轮中心所在直线到所述车体前端的右侧触发组件之间的间距d9,设定所述前左轮和所述前右轮转动的速度大小均为v;
13、所述步骤s21包括具体以下步骤:步骤s211、将所述车体绕所述转动中心点沿着第一方向转动,当所述车体后端的左侧所述触发组件被触发时,所述车体停止转动,得到第四位置,然后将所述车体回复至所述第一位置,根据所述车体由所述第一位置转动至所述第四位置所用的时长t1、d8和v,计算得到所述车体由所述第一位置到所述第四位置所转动的角度β1;
14、步骤s212、根据β1、l1和d9,计算在所述第一位置上的所述车体后端与在所述第四位置上所述车体后端之间的间距dx,根据d1和dx算出所述车体后端由所述第一位置到所述第二位置需要移动的距离δd1后,根据δd1将所述车体由所述第一位置调整至所述第二位置;
15、在所述步骤s31中包括以下步骤:步骤s31、将所述车体绕所述转动中心沿着第二方向转动,所述第一方向与所述第二方向相反,当所述车体后端的右侧所述触发组件被触发时,所述车体停止转动,得到第五位置,然后将所述车体回复至所述第一位置,根据所述车体由所述第一位置转动至所述第五位置所用的时长t2、d8和v,计算得到所述车体由所述第一位置到所述第五位置所转动的角度α1;
16、步骤s312、根据α1、l1和d9,计算所述第一位置上所述车体后端与所述第五位置上所述车体后端之间的间距,得到dy,根据d2和dy算出所述车体后端由所述第一位置到所述第三位置需要移动的距离δd2后,根据δd2将所述车体由所述第一位置调整至所述第三位置。
17、另一方面,还提供一种巡检机器人,包括车体和四个设置在所述车体上的触发组件,四个所述触发组件中的其中两者分别设置在在所述车体前端的左、右两侧,另外两者分别设置在所述车体后端的左、右两侧,每组所述触发组件均包括驱动件、第一升降件和位于所述第一升降件上方的第二升降件,所述第一升降件和所述第二升降件均可升降,所述第一升降件通过第一弹性件与所述第二升降件连接,所述第一弹性件始终具有驱使所述第一升降件向下运动的趋势,所述第一升降件的底部连接有抵接件,所述抵接件被移出巡检道路的外部时,所述第一弹性件驱使所述抵接件下降并抵接在所述巡检道路的下侧地面,使所述触发组件被触发,当所述触发组件被触发时,所述驱动件驱动所述第二升降件上升,带动所述抵接件上升并复位,以使所述触发组件由触发状态转为非触发状态。
18、作为所述的巡检机器人优选的技术方案,所述触发组件还包括控制器,所述控制器包括控制单元和与所述控制单元连接的电阻检测单元,所述控制单元用于控制所述驱动件运转,所述第一升降件包括导电件和与所述导电件滑动连接的电阻杆,所述导电件设置在所述电阻杆的一侧,所述电阻杆的上端和所述导电件分别与所述电阻检测单元电连接,所述抵接件与所述电阻杆的下端连接。
19、作为所述的巡检机器人优选的技术方案,所述电阻杆的上端设置有第一连接块,所述第一连接块为导电体,所述第一弹性件远离所述第二升降件的一端和所述电阻杆的上端均与所述第一连接块连接,所述第一连接块与所述控制器的所述电阻检测单元电连接。
20、作为所述的巡检机器人优选的技术方案,所述第二升降件包括升降杆和第二连接块,所述升降杆的下端与所述第二连接块连接,所述第一弹性件的远离所述第一升降件的一端与所述第二连接块连接,所述升降杆上具有齿条段,所述齿条段沿着所述升降杆的长度方向延伸,所述驱动件包括驱动电机和设置在所述驱动电机的输出轴上的驱动齿轮,所述驱动齿轮与所述齿条段啮合连接,所述控制器与所述驱动电机电连接,以控制所述驱动电机的运转。
21、作为所述的巡检机器人优选的技术方案,所述触发组件还包括壳体,所述壳体的内部设置有腔体,所述腔体的底部贯穿设置有第一通孔,所述驱动齿轮、所述第一弹性件、所述第一升降件和所述第二升降件均设置在所述腔体内,所述抵接件的下端穿过所述第一通孔凸出于所述腔体的外部。
22、作为所述的巡检机器人优选的技术方案,所述第一通孔的设置有第一导向套,所述第一导向套与所述抵接件滑动连接,所述抵接件穿设所述第一导向套。
23、作为所述的巡检机器人优选的技术方案,所述壳体的顶部贯穿设置有与所述腔体内部连通的第二通孔,所述升降杆的上端活动穿过所述第二通孔伸出至所述壳体的外部。
24、作为所述的巡检机器人优选的技术方案,所述第二通孔设置有第二导向套,所述第二导向套与所述升降杆滑动连接,所述升降杆穿设所述第二导向套。
25、本发明的有益效果为:通过调整车体后端的位置,使得车体后端左侧的触发组件与巡检道路左侧之间的间距大于d1,在车体后端的左侧预留了足够的空间供车体后端拐弯,这样右拐弯过程中巡检机器人的后端不会从巡检道路的左侧边缘跌落,通过触发组件与车体的配合可以将车体调整至第二位置,在车体前端的左侧预留足够的空间供车体前端拐弯,这样右拐的过程中巡检机器人的前端不会从巡检道路的左侧跌落;通过调整车体后端的位置,使得车体后端右侧的触发组件与巡检道路右侧之间的间距大于d2,在车体后端的右侧预留了足够的空间供车体后端拐弯,这样左拐弯过程中巡检机器人的后端不会从巡检道路的右侧边缘跌落,通过触发组件与车体的配合可以将车体调整至第三位置,在车体前端的右侧预留足够的空间供车体前端拐弯,这样左拐的过程中巡检机器人的前端不会从巡检道路的右侧跌落。此种防跌落方法中,可以有效地防止巡检机器人拐弯时从巡检道路的左侧边缘或右侧边缘跌落而导致巡检机器人无法脱困的现象,有利于减少值班人员的工作量以及提高了巡检机器人的安全性。
- 还没有人留言评论。精彩留言会获得点赞!