一种车辆后轮控制方法、装置、车辆和存储介质与流程
本技术涉及汽车控制,并且更具体地,涉及一种车辆后轮控制方法、车辆后轮控制装置、车辆和计算机可读存储介质。
背景技术:
1、在使用车辆的过程中,倒车是会令大多用户感到头疼的事情,为了提高车辆在倒车过程中的灵活性,可以通过增加后轮转向减小车辆的转弯半径,使倒车入库变得更加简便。但是,后轮转向的增加可能会使用户在倒车入库时需要反复调整车辆的位置来完成倒车入库,增加了用户倒车入库的困难程度。
2、因此,如何降低后轮转向对用户倒车效率和准确度的影响成为了亟需解决的问题。
技术实现思路
1、本技术提供了一种车辆后轮控制方法、车辆后轮控制装置、车辆和计算机可读存储介质,该方法能够提高用户的倒车效率和准确度,同时还可以降低车辆后轮的使用损耗,增加了车辆后轮的使用寿命。
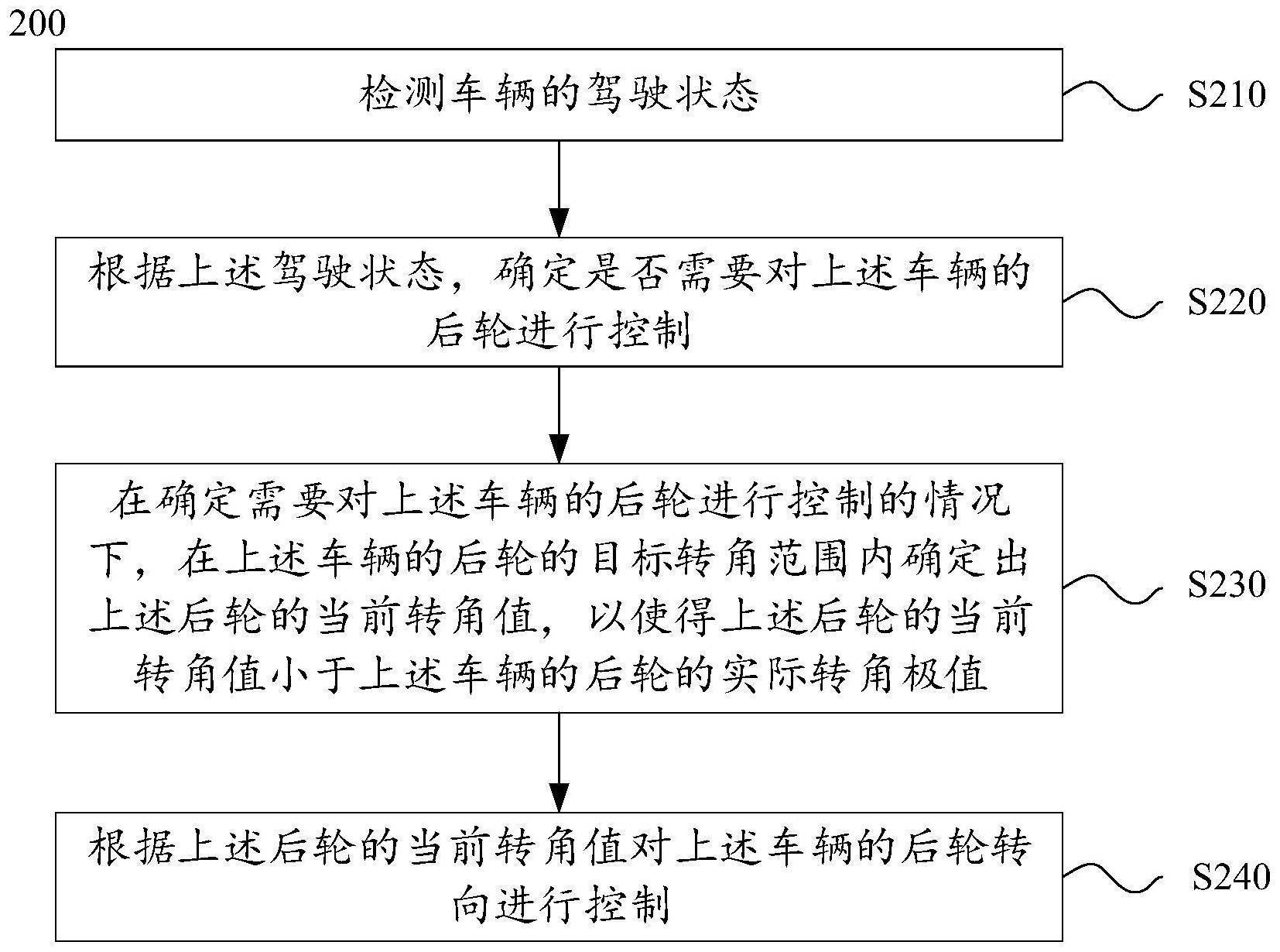
2、第一方面,提供了一种车辆后轮控制方法,该方法包括:检测车辆的驾驶状态;根据上述驾驶状态,确定是否需要对上述车辆的后轮进行控制;在确定需要对上述车辆的后轮进行控制的情况下,在上述车辆的后轮的目标转角范围内确定出上述后轮的当前转角值,以使得上述后轮的当前转角值小于上述车辆的后轮的实际转角极值;根据后轮的当前转角值对车辆的后轮转向进行控制。
3、结合第一方面,在第一方面的某些实现方式中,上述在上述车辆的后轮的目标转角范围内确定出上述后轮的当前转角值,该方法包括:获取上述车辆的车速信息;根据上述车速信息确定上述车辆的转角比例值,其中,上述转角比例值与上述车速信息存在线性关系,上述转角比例值为上述后轮的转角值和上述前轮的转角值的比值;获取上述车辆的前轮的当前转角值,并根据确定的上述转角比例值和上述前轮的当前转角值,在上述目标转角范围内确定出上述后轮的当前转角值。
4、结合第一方面和上述实现方式,在第一方面的某些实现方式中,上述线性关系基于多个车速信息和多个转角比例值标定得到,上述多个转角比例值处于预设的比例值范围,以使得根据上述转角比例值计算得到的后轮的当前转角值处于上述目标转角范围内。
5、结合第一方面和上述实现方式,在第一方面的某些实现方式中,上述根据上述驾驶状态,确定是否需要对上述车辆的后轮进行控制,该方法包括:在上述驾驶状态处于倒车状态或转弯状态的情况下,确定需要对上述车辆的后轮进行控制。
6、结合第一方面和上述实现方式,在第一方面的某些实现方式中,该方法还包括:在确定不需要对上述车辆的后轮进行控制的情况下,控制上述后轮的当前转角值复位至初始角度,其中,上述初始角度为上述车辆的后轮未进行转向的角度。
7、结合第一方面和上述实现方式,在第一方面的某些实现方式中,上述检测车辆的驾驶状态,该方法包括:获取上述车辆的车速信息、方向盘转角信息和电源状态;在确定上述车速信息和上述方向盘转角信息有效,且上述电源状态处于激活状态的情况下,获取上述车辆的当前档位;在确定上述当前档位为倒车档的情况下,确定上述车辆的驾驶状态为倒车状态。
8、结合第一方面和上述实现方式,在第一方面的某些实现方式中,上述根据上述后轮的转角值对上述车辆的后轮转向进行控制之后,该方法还包括:接收上述车辆的执行模块反馈的关于上述后轮转向的执行状态,并对上述执行状态进行监测;在上述执行状态出现异常的情况下,向上述车辆的报警控制模块发送异常信息,以使上述报警控制模块根据接收到的上述异常信息发送报警提示。
9、第二方面,提供了一种车辆后轮控制装置,该装置包括:检测模块,用于检测车辆的驾驶状态;第一确定模块,用于根据上述驾驶状态,确定是否需要对上述车辆的后轮进行控制;第二确定模块,用于在确定需要对上述车辆的后轮进行控制的情况下,在上述车辆的后轮的目标转角范围内确定出上述后轮的当前转角值,以使得上述后轮的当前转角值小于上述车辆的后轮的实际转角极值;控制模块,用于根据上述后轮的当前转角值对上述车辆的后轮转向进行控制。
10、结合第二方面,在第二方面的某些实现方式中,上述在上述车辆的后轮的目标转角范围内确定出上述后轮的当前转角值,第二确定模块具体用于:获取上述车辆的车速信息;根据上述车速信息确定上述车辆的转角比例值,其中,上述转角比例值与上述车速信息存在线性关系,上述转角比例值为上述后轮的转角值和上述前轮的转角值的比值;获取上述车辆的前轮的当前转角值,并根据确定的上述转角比例值和上述前轮的当前转角值,在上述目标转角范围内确定出上述后轮的当前转角值。
11、结合第二方面和上述实现方式,在第二方面的某些实现方式中,上述线性关系基于多个车速信息和多个转角比例值标定得到,上述多个转角比例值处于预设的比例值范围,以使得根据上述转角比例值计算得到的后轮的当前转角值处于上述目标转角范围内。
12、结合第二方面和上述实现方式,在第二方面的某些实现方式中,上述根据上述驾驶状态,确定是否需要对上述车辆的后轮进行控制,第一确定模块具体用于:在上述驾驶状态处于倒车状态或转弯状态的情况下,确定需要对上述车辆的后轮进行控制。
13、结合第二方面和上述实现方式,在第二方面的某些实现方式中,第二确定模块还用于:在确定不需要对上述车辆的后轮进行控制的情况下,控制上述后轮的当前转角值复位至初始角度,其中,上述初始角度为上述车辆的后轮未进行转向的角度。
14、结合第二方面和上述实现方式,在第二方面的某些实现方式中,上述检测车辆的驾驶状态,检测模块具体用于:获取上述车辆的车速信息、方向盘转角信息和电源状态;在确定上述车速信息和上述方向盘转角信息有效,且上述电源状态处于激活状态的情况下,获取上述车辆的当前档位;在确定上述当前档位为倒车档的情况下,确定上述车辆的驾驶状态为倒车状态。
15、结合第二方面和上述实现方式,在第二方面的某些实现方式中,上述根据上述后轮的转角值对上述车辆的后轮转向进行控制之后,控制模块还用于:接收上述车辆的执行模块反馈的关于上述后轮转向的执行状态,并对上述执行状态进行监测;在上述执行状态出现异常的情况下,向上述车辆的报警控制模块发送异常信息,以使上述报警控制模块根据接收到的上述异常信息发送报警提示。
16、第三方面,提供一种车辆,包括存储器和处理器。该存储器用于存储可执行程序代码,该处理器用于从存储器中调用并运行该可执行程序代码,使得该车辆执行上述第一方面或第一方面任意一种可能的实现方式中的方法。
17、第四方面,提供了一种计算机程序产品,该计算机程序产品包括:计算机程序代码,当该计算机程序代码在计算机上运行时,使得该计算机执行上述第一方面或第一方面任意一种可能的实现方式中的方法。
18、第五方面,提供了一种计算机可读存储介质,该计算机可读存储介质存储有计算机程序代码,当该计算机程序代码在计算机上运行时,使得该计算机执行上述第一方面或第一方面任意一种可能的实现方式中的方法。
19、本技术提供的技术方案中,根据检测到的车辆驾驶状态来确定是否需要对车辆的后轮进行控制,在确定需要对车辆的后轮进行控制时,在车辆的后轮的目标转角范围内确定出后轮的转角值,从而使后轮的当前转角值小于实际转角极值,并根据该后轮的转角值对车辆的后轮转向进行控制。可见,本技术实施例提供的车辆后轮控制方法中,通过车辆驾驶状态来确定是否对车辆的后轮进行控制,在确定需要对车辆的后轮进行控制时,获得与车辆驾驶状态相匹配的车辆后轮控制方案,使用小于车辆的后轮的实际转角极值的转角值来控制车辆的后轮转向,以避免车辆在倒车或转弯时出现后轮过度转向,从而可以使车辆的后轮转向在倒车或转弯时具备灵活性的同时更加符合用户的驾驶习惯,进而可以提高用户的倒车效率和准确度,还可以降低车辆后轮的使用损耗,增加了车辆后轮的使用寿命。
20、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!