车辆转向的控制方法、装置、车辆和存储介质与流程
本技术涉及车辆控制,尤其涉及一种车辆转向的控制方法、装置、车辆和存储介质。
背景技术:
1、汽车转向性能是汽车的主要性能之一,转向系统的性能直接影响汽车的操纵稳定性,对确保车辆的安全行驶、减少交通事故以及保护驾驶员的人身安全、改善驾驶员的工作条件起着重要的作用。如何合理地设计转向系统,使汽车具有良好的操纵性能,始终是如今重要的热点问题。
2、在现有技术中,对于汽车转向问题,最原始的操作就是通过驾驶人员转动方向盘,来实现汽车的转向,但是最原始的转向系统在控制车辆转向过程中具有较大的转弯半径,为了能够适应狭窄的道路,通过对车轮设定预设角度进行转向,进而减小转弯半径,但是这种方法对于复杂道路场景下,不能做出灵活性的改变,并且操作频繁,导致车速控制不稳定,使得用户体验感差。
3、综上所述,如何更灵活,精准高效的实现车辆0转弯半径转向是本领域亟需解决的难题。
技术实现思路
1、本技术提供一种车辆转向的控制方法、装置、车辆和存储介质,用以解决如何更灵活,精准高效的实现车辆0转弯半径转向的问题。
2、第一方面,本技术提供一种车辆转向的控制方法,应用于电机控制器,包括:
3、接收整车控制器发送的转向指令,所述转向指令包括目标方向、旋转角度、前馈扭矩、目标轮速和辅助参数,所述辅助参数用于辅助所述电机控制器对所述转向指令做出响应;
4、根据所述目标方向、所述目标轮速和所述辅助参数,对所述前馈扭矩做出响应,得到响应信号;
5、将所述响应信号发送至所述整车控制器;
6、接收所述整车控制器发送的车轮转动角度,所述车轮转动角度是所述整车控制器根据所述响应信号计算得到的;
7、根据所述目标方向、所述目标轮速、所述车轮转动角度、所述旋转角度和所述辅助参数,进行自闭环控制,控制车辆完成转向。
8、结合第一方面,在一些实施例中,所述根据所述目标方向、所述目标轮速、所述车轮转动角度、所述旋转角度和所述辅助参数,进行自闭环控制,控制车辆完成转向,包括:
9、根据所述目标轮速、所述车轮转动角度和所述旋转角度,计算得到电机转速和目标旋转角度;
10、根据所述目标方向、所述电机转速、所述目标旋转角度和所述辅助参数,计算得到目标扭矩;
11、根据所述目标扭矩、所述电机转速和所述目标旋转角度,控制所述车辆完成转向。
12、结合第一方面,在一些实施例中,所述方法还包括:
13、获取自身故障信息,并发送至所述整车控制器,所述自身故障信息包括过温或者超载;
14、接收所述整车控制器发送的终止指令,所述终止指令用于指示所述电机控制器结束控制所述车辆进行转向工作;
15、根据所述终止指令,控制所述车辆终止转向。
16、第二方面,本技术提供一种车辆转向的控制方法,应用于整车控制器,包括:
17、在自动调头模式开启时,获取用户输入的预激活信号,所述预激活信号包括旋转方向信号、旋转角度信号、刹车踏板信号、油门踏板信号和档位信号;
18、根据所述预激活信号,获取车辆的辅助参数,所述辅助参数用于辅助电机控制器对转向指令做出响应;
19、根据所述旋转方向信号、刹车踏板信号、油门踏板信号和档位信号,得到目标方向、旋转角度、前馈扭矩、目标轮速,所述前馈扭矩用于指示所述电机控制器开始控制车辆进行转向工作;
20、向所述电机控制器发送所述转向指令,所述转向指令包括所述目标方向、所述旋转角度、所述前馈扭矩、所述目标轮速和所述辅助参数。
21、结合第二方面,在一些实施例中,所述方法还包括:
22、接收所述电机控制器发送的响应信号;
23、根据所述响应信号,获取摆角度传感器信息和侧纵向加速度信息;
24、根据所述摆角度传感器信息和所述侧纵向加速度信息,计算得到车轮转动角度;
25、将所述车轮转动角度,发送至所述电机控制器。
26、结合第二方面,在一些实施例中,所述方法还包括:
27、接收所述电机控制器发送的自身故障信息,所述自身故障信息包括过温或者超载;
28、根据所述自身故障信息,生成终止指令,并发送至所述电机控制器,所述终止指令用于指示所述电机控制器结束控制所述车辆进行转向工作。
29、结合第二方面,在一些实施例中,所述接收用户发送的预激活信号之前,所述方法还包括:
30、接收所述用户输入的自动调头开启信号;
31、根据所述自动调头开启信号,开启自动调头模式。
32、第三方面,本技术提供一种车辆转向的控制装置,包括:
33、第一接收模块,用于接收整车控制器发送的转向指令,所述转向指令包括目标方向、旋转角度、前馈扭矩、目标轮速和辅助参数,所述辅助参数用于辅助电机控制器对所述转向指令做出响应;
34、响应模块,用于根据所述目标方向、所述目标轮速和所述辅助参数,对所述前馈扭矩做出响应,得到响应信号;
35、发送模块,用于将所述响应信号发送至所述整车控制器;
36、第二接收模块,用于接收所述整车控制器发送的车轮转动角度,所述车轮转动角度是所述整车控制器根据所述响应信号计算得到的;
37、第一控制模块,用于根据所述目标方向、所述目标轮速、所述车轮转动角度、所述旋转角度和所述辅助参数,进行自闭环控制,控制车辆完成转向。
38、结合第三方面,在一些实施例中,所述第一控制模块,包括:
39、第一计算单元,用于根据所述目标轮速、所述车轮转动角度和所述旋转角度,计算得到电机转速和目标旋转角度;
40、第二计算单元,用于根据所述目标方向、所述电机转速、所述目标旋转角度和所述辅助参数,计算得到目标扭矩;
41、控制单元,用于根据所述目标扭矩、所述电机转速和所述目标旋转角度,控制所述车辆完成转向。
42、结合第三方面,在一些实施例中,所述装置还包括:
43、获取模块,用于获取自身故障信息,并发送至所述整车控制器,所述自身故障信息包括过温或者超载;
44、第三接收模块,用于接收所述整车控制器发送的终止指令,所述终止指令用于指示所述电机控制器结束控制所述车辆进行转向工作;
45、第二控制模块,用于根据所述终止指令,控制所述车辆终止转向。
46、第四方面,本技术提供一种车辆转向的控制装置,包括:
47、第一获取模块,用于在自动调头模式开启时,获取用户输入的预激活信号,所述预激活信号包括旋转方向信号、旋转角度信号、刹车踏板信号、油门踏板信号和档位信号;
48、第二获取模块,用于根据所述预激活信号,获取车辆的辅助参数,所述辅助参数用于辅助电机控制器对转向指令做出响应;
49、生成模块,用于根据所述旋转方向信号、刹车踏板信号、油门踏板信号和档位信号,得到目标方向、旋转角度、前馈扭矩、目标轮速,所述前馈扭矩用于指示所述电机控制器开始控制车辆进行转向工作;
50、第一发送模块,用于向所述电机控制器发送所述转向指令,所述转向指令包括所述目标方向、所述旋转角度、所述前馈扭矩、所述目标轮速和所述辅助参数。
51、结合第四方面,在一些实施例中,所述装置还包括:
52、第一接收模块,用于接收所述电机控制器发送的响应信号;
53、第三获取模块,用于根据所述响应信号,获取摆角度传感器信息和侧纵向加速度信息;
54、计算模块,用于根据所述摆角度传感器信息和所述侧纵向加速度信息,计算得到车轮转动角度;
55、第二发送模块,用于将所述车轮转动角度,发送至所述电机控制器。
56、结合第四方面,在一些实施例中,所述装置还包括:
57、第二接收模块,用于接收所述用户输入的自动调头开启信号;
58、模式开启模块,用于根据所述自动调头开启信号,开启自动调头模式。
59、第五方面,本技术提供一种车辆,包括:车辆主体,设置于车辆主体中的存储单元,电子控制单元,显示屏;
60、所述存储单元存储计算机执行指令;
61、所述电子控制单元执行所述存储单元存储的计算机执行指令,以实现上述任一方面所述的方法。
62、第六方面,本技术提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机执行指令,所述计算机执行指令被处理器执行时用于实现上述任一项所述的车辆转向的控制方法。
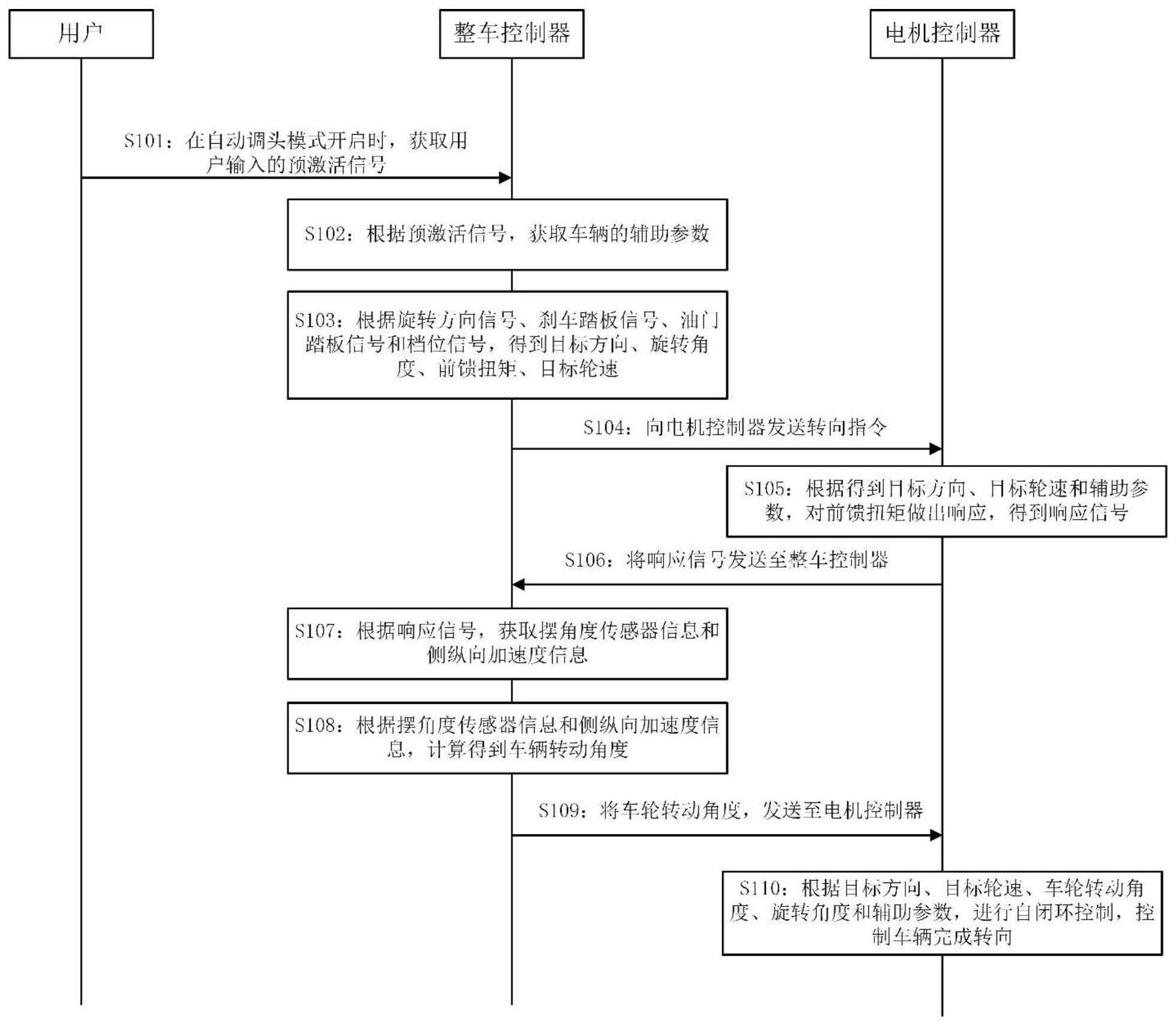
63、本技术提供的车辆转向的控制方法、装置、车辆和存储介质,在自动调头模式开启时,整车控制器获取用户输入的预激活信号,根据预激活信号,获取车辆的辅助参数,再根据旋转方向信号、刹车踏板信号、油门踏板信号和档位信号,得到目标方向、旋转角度、前馈扭矩、目标轮速,向电机控制器发送转向指令。电机控制器根据目标方向、目标轮速和辅助参数,对前馈扭矩做出响应,得到响应信号,并将响应信号发送至整车控制器。整车控制器根据响应信号,获取摆角度传感器信息和侧纵向加速度信息,然后计算得到车轮转动角度,并发送至电机控制器。电机控制器根据目标方向、目标轮速、车轮转动角度、旋转角度和辅助参数,进行自闭环控制,控制车辆完成转向。通过上述方法,实现了车辆自动调头0转弯半径转向,使得车辆转向更加灵活,精准高效,并且减少了旋转误差,实现了毫秒级的驱动控制。
- 还没有人留言评论。精彩留言会获得点赞!