一种双闭链弓形五连杆四足滚动机器人
本发明涉及移动机器人领域,尤其涉及一种双闭链弓形五连杆四足滚动机器人。
背景技术:
1、轮足复合移动机器人综合了轮式滚动和足式步行的优点,既能够在平坦地形中保持较高的移动速率,又能够在崎岖地形中保持较好的通过性,具有较好的综合移动性能,是复合移动机器人中研究较多的一种。纵观国内外现有研究成果,可将轮足复合移动机器人分为两类:第一类是直接将轮子以串联的形式置于腿的末端,轮子以主动或被动的形式驱动;第二类则是采用轮腿分离的形式,将轮式滚动与足式步行设计成两套独立的系统。前述的两种传统轮足复合移动机器人基本都实现了足式步行和轮式滚动的结合,但仍存在如下一些问题:
2、1.传统轮足复合机器人轮与足的相互独立,使得运动模式的转换需要增加转换或调整机构来实现。而且驱动器的增加和布线问题,从而导致控制系统更加复杂,控制算法难度增大,可靠性降低。并且,当复合系统以单一系统运行时,另一系统就完全冗余,影响系统的动态性能。
3、2.轮腿一体式和仿生轮足复合式移动机器人均较好地实现了轮与足的融合。但是轮腿一体式机器人步态较为单一,行走速度较慢,轮腿转换时稳定性较差,且随着轮辐的增加,越障能力明显下降;而仿生轮足复合式机器人滚动速度较低,未能获得连续、稳定的动态滚动,且步态规划和控制策略相对复杂,越障能力较弱。
4、3.可重构模块化滚动机器人实现了平面或空间滚动,但此类机器人均采用传统结构杆件,使得其在运动的过程中会受到地面冲击力的影响,导致稳定性降低,不能实现稳定的高速动态滚动。
技术实现思路
1、针对现有技术的上述不足,本发明提供一种从形态学仿生的视角出发,在移动机构的设计中引入了弓形杆件,通过改变自身的形状来实现机器人的动态翻滚或越障的双闭链弓形五连杆四足滚动机器人。
2、为达到上述发明目的,本发明所采用的技术方案为:
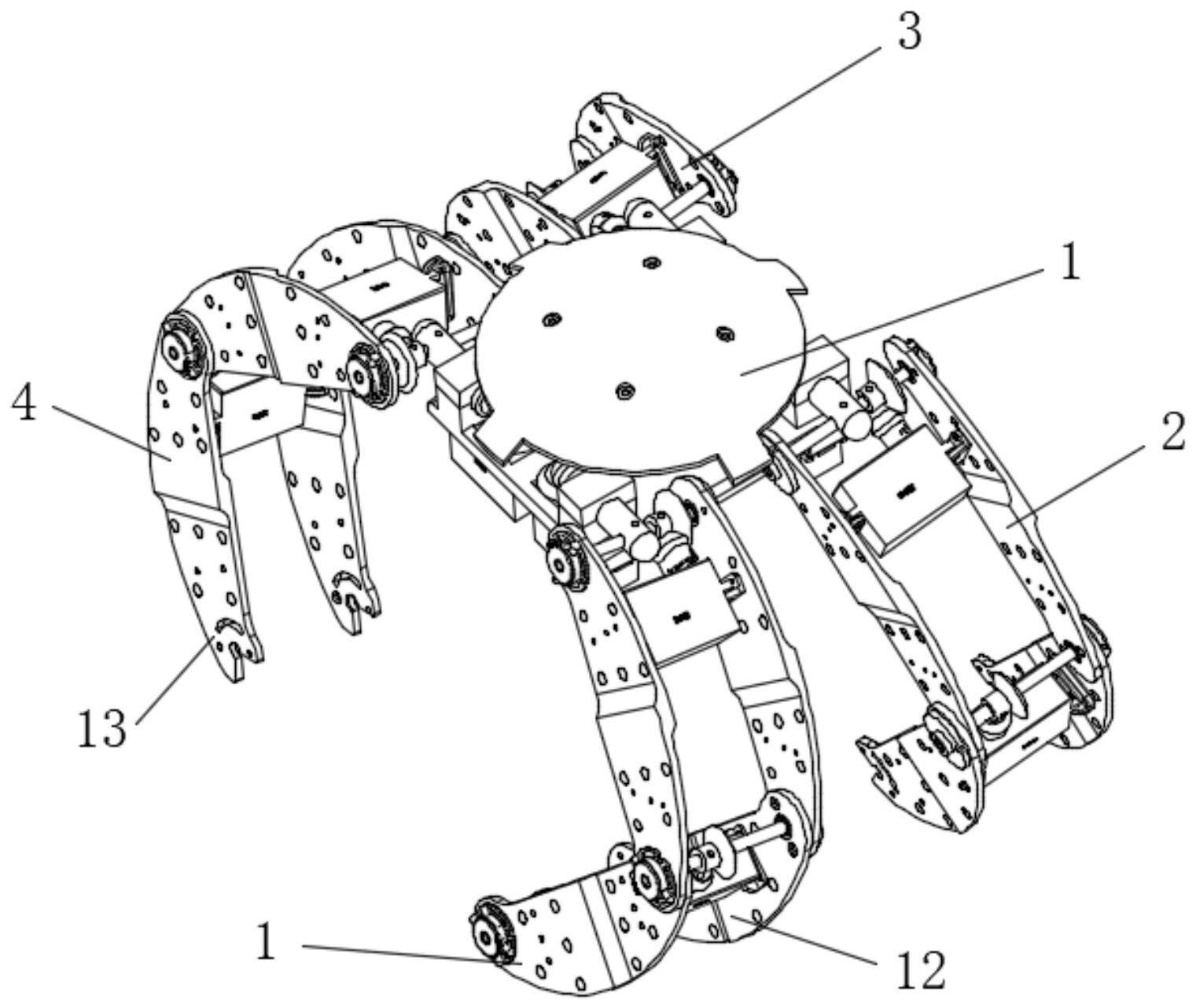
3、提供一种双闭链弓形五连杆四足滚动机器人,包括球冠机体,以及安装在球冠机体上的第一弓形模块、第二弓形模块、第三弓形模块和第四弓形模块;第一弓形模块、第二弓形模块、第三弓形模块和第四弓形模块均通过髋关节侧摆机构安装在球冠机体上,髋关节侧摆机构可带动第一弓形模块、第二弓形模块、第三弓形模块和第四弓形模块的上端前后摆动;第一弓形模块、第二弓形模块、第三弓形模块和第四弓形模块均包括有上弓形模块,上弓形模块与髋关节侧摆机构连接,上弓形模块的上端可以左右摆动;第一弓形模块和第三弓形模块结构相同,第一弓形模块与第三弓形模块还包括有第一下弓形模块,第一下弓形模块的上端与上弓形模块连接,第一下弓形模块的上端可以左右摆动;第二弓形模块与第四弓形模块结构相同,第二弓形模块和第四弓形模块还包括有第二下弓形模块,第二下弓形模块的上端与上弓形模块连接,第二下弓形模块的上端可以左右摆动;第一下弓形模块的下端分别设置有踝关节吸合装置,第一弓形模块与第四弓形模块通过踝关节吸合装置连接形成第一支链;第二弓形模块与第三弓形模块通过踝关节吸合装置连接形成第二支链。
4、进一步地,上弓形模块包括有髋关节旋转电机、髋关节旋转转轴、大腿主动锥齿轮、大腿从动锥齿轮、膝关节旋转转轴和两处上弓形板;髋关节旋转转轴与髋关节侧摆机构连接,髋关节旋转转轴分别固定在两处上弓形板的上端,膝关节旋转转轴分别固定在两处上弓形板的下端,上弓形板上设置有安装髋关节旋转转轴和膝关节旋转转轴的通孔;髋关节旋转转轴和膝关节旋转转轴的一端设置有大腿安装法兰,另一端设置有大腿角位移传感器;大腿从动锥齿轮固定在髋关节旋转转轴上,大腿主动锥齿轮固定在髋关节旋转电机的输出轴上,大腿主动锥齿轮和大腿主动锥齿轮啮合连接,髋关节旋转电机驱动上弓形模块上端左右摆动;髋关节旋转电机通过第一电机安装板安装在上弓形板上,两处上弓形板上还设置有与第一电机安装板配合的电机安装板通孔;上弓形板上设置有若干减重孔。
5、进一步地,第一下弓形模块包括有第一膝关节旋转电机、第一小腿主动锥齿轮、第一小腿从动锥齿轮、第一小腿角位移传感器、两处第一下弓形板、第一小腿安装法兰、踝关节转轴和两处第一下弓形板;第一小腿从动锥齿轮固定在膝关节旋转转轴上,两处第一下弓形板转动安装在膝关节旋转转轴上,第一小腿主动锥齿轮安装在第一膝关节旋转电机的输出轴上,第一小腿主动锥齿轮与第一小腿从动锥齿轮啮合连接;踝关节转轴固定在两处第一下弓形板的下端,第一小腿角位移传感器、第一小腿安装法兰分别固定在踝关节转轴的两端,踝关节转轴上还设置有踝关节吸合装置;第一膝关节旋转电机驱动第一下弓形模块的上端左右转动;第一膝关节旋转电机通过第二电机安装板固定在两处第一下弓形板之间。
6、进一步地,踝关节吸合装置包括有依次固定在踝关节转轴上的静铁芯、弹簧、动铁芯和插销,静铁芯固定在踝关节转轴上,动铁芯活动安装在踝关节转轴上,动铁芯与插销固定连接;插销包括有弧形插接部和与动铁芯连接的安装底板,弧形插接部与安装底板一体设计;动铁芯和踝关节转轴上设置有连通的径向通孔,动铁芯和插销上设置有配合的轴向螺钉孔,动铁芯和插销通过轴向螺钉孔内的螺钉连接。
7、进一步地,第二下弓形模块包括有第二膝关节旋转电机、第二小腿主动锥齿、第二小腿从动锥齿轮、第二小腿角位移传感器、第二小腿安装法兰和两处第二下弓形板;两处第二下弓形板的上端安装在膝关节旋转转轴上,两处第二下弓形板可以在膝关节旋转轴上转动,第二小腿角位移传感器、第二小腿安装法兰分别设置在膝关节旋转转轴两端;第二小腿从动锥齿轮固定在膝关节旋转转轴上,第二小腿主动锥齿固定在第二膝关节旋转电机的输出端,第二小腿主动锥齿与第二小腿从动锥齿轮啮合连接,第二膝关节旋转电机驱动第二下弓形模块的上端左右转动;第二下弓形板的下端设置有圆弧形插孔和踝关节轴孔,踝关节轴孔的底部设置有扇形开口;第二膝关节旋转电机通过第三电机安装板安装在两处第二下弓形板之间;第二下弓形板上设置安装膝关节旋转转轴的转轴孔。
8、进一步地,球冠机体包括有上球冠和机体支撑板,上球冠固定在机体支撑板上,机体支撑板的顶部设置有安装髋关节侧摆机构的轴承支架,机体支撑板的底部设置有安装电机安装孔;上球冠上设置有安装沉孔,机体支撑板上设置有安装螺纹孔。
9、进一步地,髋关节侧摆机构包括有髋关节侧摆电机、第一主动锥齿轮、第二从动锥齿轮和髋关节侧摆轴;髋关节侧摆电机和髋关节侧摆轴固定在球冠机体上,第二从动锥齿轮固定在髋关节侧摆轴上,第一主动锥齿轮固定在髋关节侧摆电机的输出轴上;髋关节侧摆轴上设置有安装上弓形模块的转动通孔;髋关节侧摆机构设置有四处,四处髋关节侧摆机构分别与第一弓形模块、第二弓形模块、第三弓形模块和第四弓形模块连接。
10、本发明的有益效果为:
11、本发明的第一弓形模块、第二弓形模块、第三弓形模块、第四弓形模块和球冠机体均采用弧形元素设计四足机器人的结构,实现了轮式滚动与足式步行的真正融合。本发明的四足机器人由球冠机体和四处弓形模块四肢组成,在踝关节安装踝关节吸合装置,使前后小腿的末端能够在滚动过程中组合为被动关节,形成双闭链弓形五连杆机构。
12、本发明通过髋关节侧摆机构、上弓形模块、第一下弓形模块、第二下弓形模块的控制关节运动,可使四足机器人由步行模式转换到滚动模式。使四足机器人既能以其固有的步行模式通过崎岖地形,也可在平坦地形进行快捷高效的动态滚动,对多重特征地形具有良好的适应能力。
13、本发明在滚动过程中,改变第一支链、第二支链的相对构型,从而改变第一支链、第二支链的质心偏置,产生重力偏置力矩以驱动机器人滚动。通过调节第一支链、第二支链的速度、加速度,获得相应的曲线滚动轨迹。第一支链、第二支链的外侧为可变形的圆环形结构,使得机器人在滚动过程中可有效消除地面冲击力的影响,进而以动态滚动的形式快速通过平坦地形,提高了能量利用效率,而且在滚动中可通过第一支链、第二支链的协同运动来实现曲线滚动,提高运动灵活性。
14、本发明的四足机器人的结构功能一体化设计方法以及四足机器人变为五连杆滚动机器人的转换形式。基于弧形元素设计四足机器人,使其能够利用自身肢体构成双闭链机构进行滚动,实现了轮与足的真正融合。
15、本发明基于对称差速协同的双闭链弓形五连杆机构曲线滚动方法。针对弓形四肢和球冠机体相继触地过程,采用对称差速协同的双闭链机构曲线滚动策略,使不同构件触地滚动过程具有统一的运动学形式。
16、本发明通过将第一弓形模块与第四弓形模块、第二弓形模块和第三弓形模块在踝关节处连接形成一个闭环,使机器人整体构成一个双闭链滚动体,以滚动体的形式在平坦地面进行高效的滚动运动,实现了轮式滚动与足式步行的真正融合。
17、本发明借鉴仿生学以及被动步行机器人方面的研究成果,从形态学仿生的视角出发,在移动机构的设计中引入了弓形杆件,设计了一种双闭链弓形五连杆四足滚动机器人。该机器人可以通过改变自身的形状来实现机器人的动态翻滚或越障。由于弓形杆件具有规则的圆弧外轮廓,形态学特性良好,当其绕曲率中心点转动时,其杆件与地面间的接触效果是稳定而圆滑的。
- 还没有人留言评论。精彩留言会获得点赞!