角度检测系统和车辆的制作方法
本技术涉及工程车辆,具体而言,涉及一种角度检测系统和一种车辆。
背景技术:
1、由于矿用车采用了液压转向,在无人驾驶的矿用车上需要实时反馈车轮转角信息,因此转角信息反馈的精度对于无人驾驶控制的准确性十分重要。
2、现有技术中采用独立悬架的矿车,一般采用油缸内置式位移式传感器,此类型传感器需要增大油缸长度,对于部分车辆存在布置困难的问题。此外,油缸内置式位移传感器维修时需要拆卸油缸,提高了维修成本,增加了维修工时。
技术实现思路
1、本实用新型旨在至少解决现有技术或相关技术中存在的技术问题之一。
2、为此,本实用新型的第一个目的在于提出了一种角度检测系统。
3、本实用新型的第二个目的在于提出了一种车辆。
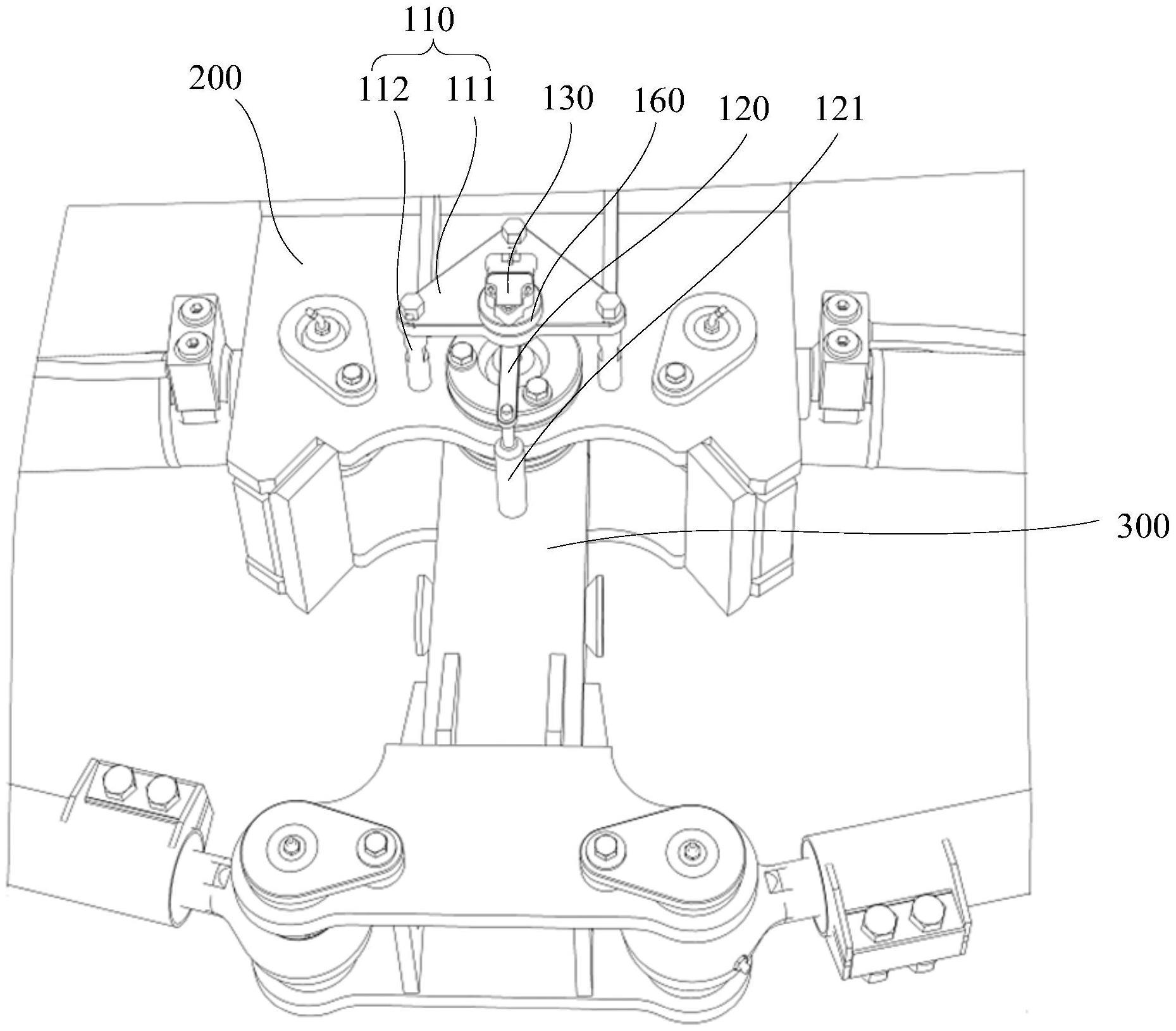
4、为实现上述至少一个目的,根据本实用新型的第一方面,提出了一种角度检测系统,用于检测车辆的车轮的转弯角度,角度检测系统包括:支架组件,安装于车辆的车架;摇臂,摇臂的一端可转动地连接于支架组件,摇臂的另一端连接于车辆的悬架,车辆的悬架用于带动车轮转弯,摇臂能够在悬架的带动下相对于支架组件转动;转角传感器,安装于支架组件,转角传感器用于检测摇臂的转动角度;车辆控制器,与转角传感器电连接,车辆控制器用于根据转角传感器的检测结果确定车轮的转弯角度。
5、本技术所提出的角度检测系统,用于具有独立悬架的车辆中,具有独立悬架的车辆包括车架和悬架,悬架与车架可转动地连接,悬架与车辆的车轮相连,在悬架相对于车架转动时,悬架能够带动车轮在一定的角度范围内转弯,进而实现车辆的转弯。可理解地,在控制车辆行走的过程中,需要对车轮的转弯角度进行监测,为此,本技术提出了一种能够用于车辆中的角度检测系统,通过角度检测系统能够对车辆中车轮的转弯角度进行检测,以提升对车辆的控制精度。
6、进一步地,角度检测系统包括支架组件、摇臂、转角传感器和车辆控制器,其中,支架组件用于对摇臂和转角传感器进行安装固定,摇臂的一端能够随悬架移动,另一端能够在悬架的带动下相对于支架组件转动,转角传感器能够对摇臂的转动角度进行检测,车辆控制器能够根据转角传感器所检测到的摇臂的转动角度确定车轮的转弯角度。具体地,支架组件安装于车辆的车架,摇臂的一端与车辆的悬架相连,另一端可转动地连接于支架组件,由于悬架能够相对于车架转动,因此,在悬架相对于车架转动的情况下,悬架带动摇臂相对于固定于车架的支架组件转动。转角传感器安装于支架组件,转角传感器与摇臂连接于支架组件的一端相对设置,转角传感器能够检测摇臂的转动角度,由于摇臂随悬架转动,因此摇臂的转动角度即为悬架相对于车架的转动角度。车辆控制器与转角传感器电连接,车辆控制器能够接收到转角传感器所检测到的摇臂的转动角度,车辆控制器根据转角传感器的检测结果确定车轮的转弯角度。
7、通过在角度检测系统中设置摇臂和转角传感器,并将摇臂的一端连接于车辆的悬架,另一端可转动地连接于安装于车架的支架组件,从而能够使摇臂能够随悬架转动,通过转角传感器对摇臂的转动角度进行检测,以确定悬架的转动角度,进而通过车辆控制器根据转角传感器的检测结果确定车轮的转弯角度,实现对车辆中车轮的转弯角度的检测,以便于对车轮的转弯角度进行控制,实现对车辆运行的精确控制。相较于采用油缸内置式位移式传感器而言,本技术所提出的角度检测系统无需增大油缸的长度,节省了油缸所占用的空间,降低了零部件的布置难度,并且,在对角度检测系统进行维修时,无需对油缸进行拆卸,降低了维修难度,提高了维修效率。
8、根据本实用新型上述的角度检测系统,还可以具有以下区别技术特征:
9、在一些技术方案中,可选地,角度检测系统还包括:磁性件,与摇臂相连,摇臂带动磁性件相对于转角传感器转动,转角传感器根据磁性件的转动角度确定摇臂的转动角度。
10、在该技术方案中,对角度检测系统进行进一步限定。角度检测系统还包括磁性件,磁性件与摇臂连接于支架组件的一端相连,摇臂能够带动磁性件相对于转角传感器转动。磁性件能够形成磁场,在磁性件随摇臂相对于转角传感器转动的情况下,磁性件所形成的磁场发生变化,转角传感器能够根据磁场的变化确定磁性件所转过的角度,进而确定摇臂所转过的角度。
11、通过在角度检测系统中设置能够随摇臂进行转动的磁性件,可以使转角传感器根据磁性件所形成的磁场变化确定磁性件转过的角度,进而确定摇臂所转过的角度,实现转角传感器的角度检测功能。
12、在一些技术方案中,可选地,摇臂具有摇臂转轴,支架组件具有安装孔,摇臂转轴穿设于安装孔;角度检测系统还包括:连接件,连接件用于将摇臂转轴可转动地连接于安装孔,磁性件固定安装于连接件的端部,连接件能够带动磁性件随摇臂转轴相对于支架组件转动。
13、在该技术方案中,对角度检测系统进行进一步限定。为了使摇臂能够可转动地连接于支架组件,本技术在摇臂中设置了摇臂转轴,并在支架组件上设置了与摇臂转轴适配的安装孔,摇臂转轴穿设于安装孔内,角度检测系统还包括连接件,连接件用于将摇臂转轴可转动地连接于安装孔。在连接件将摇臂转轴连接于安装孔的情况下,连接件随摇臂转轴同步转动,在摇臂相对于支架组件转动的情况下,摇臂中的摇臂转轴带动连接件同步相对于支架组件转动。
14、进一步地,磁性件固定安装于连接件的上端,连接件能够带动磁性件随摇臂转轴同步相对于支架组件转动。转角传感器检测到磁性件的磁场变化,车辆控制器根据转角传感器的检测结果确定车轮的转弯角度。
15、在一种可能的技术方案中,连接件被构造为螺栓,磁性件套设于螺栓的头部,螺栓具有螺纹的螺杆穿过摇臂转轴与支架组件相连,以将摇臂转轴可转动地连接于支架组件。
16、通过在角度检测系统中设置连接件,一方面能够通过连接件将摇臂连接于支架组件,另一方面能够对磁性件进行安装定位。
17、在一些技术方案中,可选地,角度检测系统还包括:支撑块,设于支架组件与转角传感器之间,支撑块用于支撑转角传感器,以使转角传感器与磁性件之间具有间距。
18、在该技术方案中,在角度检测系统中还设有支撑块,支撑块设于支架组件与转角传感器之间,支撑块用于支撑转角传感器,如此,可以使转角传感器与磁性件之间保持合适的距离。具体地,支撑块采用不具有磁性的材料制成,支撑块的材料可以为316不锈钢,以避免对磁性件的磁场产生影响。支撑块具有通孔,该通孔与磁性件相对设置,以避免支撑件对磁性件的磁场产生影响,使转角传感器能够正常地检测到磁性件所形成的磁场。
19、在一些技术方案中,可选地,支架组件包括:支撑板,摇臂转动连接于支撑板,转角传感器安装于支撑板;多个第一支撑件,任一第一支撑件的两端分别与车架和支撑板相连,第一支撑件用于支撑支撑板。
20、在该技术方案中,对支架组件的结构进行限定。支架组件包括支撑板和多个第一支撑件,其中,摇臂转动连接于支撑板,转角传感器安装于支撑板,具体地,沿支架组件的高度方向,转角传感器、支撑块和支撑板依次设置。支撑板采用不具有磁性的材料制成,支撑板的材料可以为316不锈钢,以避免对磁性件的磁场产生影响。
21、进一步地,第一支撑件的数量为多个,任一第一支撑件的两端分别与车架和支撑板相连,第一支撑件用于对支撑板进行支撑和固定。
22、在一些技术方案中,可选地,角度检测系统还包括:第二支撑件,第二支撑件的两端分别与摇臂和悬架相连。
23、在该技术方案中,在角度检测系统中还设有第二支撑件,第二支撑件用于将摇臂与悬架相连。具体地,第二支撑件的一端与摇臂背离支架组件的一端固定相连,另一端连接于悬架。
24、通过在角度检测系统中设置第二支撑件,可以实现摇臂与悬架的连接。
25、在一些技术方案中,可选地,车辆控制器在车轮位于中位的情况下根据转角传感器的检测结果确定中位标定值,并在车轮转弯的情况下根据转角传感器的检测结果和中位标定值确定车轮的转弯角度。
26、在该技术方案中,对车辆控制器进行限定。车辆控制器能够根据转角传感器的检测结果确定车轮的转弯角度。具体地,车辆控制器在确定车轮的转弯角度之前,先在车轮位于中位时确定其所对应的中位标定值。当车轮位于中位时,转角传感器对磁性件所转过的角度进行检测,车辆控制器根据转角传感器此时的检测结果确定中位标定值。在车辆控制器确定了中位标定值后,转角传感器在车轮转弯的情况下对磁性件所转过的角度进行检测,车辆控制器根据转角传感器在车轮转弯的情况下的检测结果和中位标定值确定车轮的转弯角度。如此,可以无需限制磁性件和转角传感器的安装角度,降低了装配难度。
27、在一些技术方案中,可选地,车辆控制器能够根据车轮的转弯角度控制车轮的运行。
28、在该技术方案中,对车辆控制器进行进一步限定,在车辆控制器确定车轮的转弯角度之后,还可以根据车轮反馈的角度对车轮的转角进行闭环控制,以使车轮的转弯角度始终保持与目标转角一致,以便于对车轮的转弯角度进行控制,实现对车辆运行的精确控制。
29、本实用新型的第二方面还提出了一种车辆,包括:本实用新型第一方面所提出的角度检测系统;车架,角度检测系统中的支架组件设于车架;悬架,与车架活动连接,悬架能够相对于车架转动,角度检测系统中的摇臂的一端连接于悬架;车轮,与悬架相连,悬架能够带动车轮转弯。
30、本技术所提出的车辆,包括车架、悬架和车轮,悬架与车架活动连接,车轮与悬架相连,悬架能够相对于车架转动,进而带动车轮进行转弯。角度检测系统中的支架组件设于车架,角度检测系统中的摇臂的一端与悬架相连,另一端可转动地连接于支架组件,在悬架带动车轮进行转弯的情况下,摇臂随悬架相对于支架组件转动,角度检测系统中的转角传感器能够检测到摇臂的转动角度,角度检测系统中的车辆控制器根据转角传感器的检测结果确定车轮的转弯角度。如此,可实现对车轮转弯角度的检测。车辆控制器还能够根据车轮的转弯角度控制车轮的运行,如此,可便于对车轮的转弯角度进行控制,实现对车辆运行的精确控制。
31、本实用新型第二方面提供的车辆,因包括本实用新型第一方面提出的角度检测系统,因此具有角度检测系统的全部有益效果。
32、所述车辆包括矿用车。
33、本实用新型的附加方面和优点将在下面的描述部分中变得明显,或通过本实用新型的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!