一种膝关节结构、机械腿及双足机器人的制作方法
本技术涉及智能机器人,尤其涉及一种膝关节结构、机械腿及双足机器人。
背景技术:
1、人形机器人(又称仿人机器人)成为当前机器人领域的热点发展方向。社会老龄化问题越来越严重,发展人形机器人能够弥补年轻劳动力的不足,解决老龄化社会的各类问题。
2、人形机器人的一个研究重点是机械腿。相比履带式或轮式机械腿,双足机器人更接近真人。双足机器人中的膝关节结构连接大腿结构和小腿结构,起到承上启下的作用。目前,双足机器人的膝关节结构设计复杂,增加了机械腿的重量及生产难度。
技术实现思路
1、本实用新型提供了一种膝关节结构、机械腿及双足机器人,旨在解决目前的双足机器人中的膝关节的设计结构复杂的问题。
2、本实用新型的技术方案如下:
3、1、一种膝关节结构,用于机械腿,所述机械腿包括大腿部和小腿部,所述膝关节结构包括膝关节结构件,所述膝关节结构件具有第一连接点、第二连接点、第三连接点和第四连接点;所述第一连接点与所述第二连接点位于第一直线l1,所述第三连接点与所述第四连接点位于第二直线l2,所述第一直线l1与所述第二直线l2交汇于一点;
4、所述膝关节结构件与所述大腿部在所述第一连接点处和所述第二连接点处转动连接,所述膝关节结构件与所述小腿部在所述第三连接点处和所述第四连接点处转动连接。
5、2、根据技术方案1所述的膝关节结构,所述第一直线l1与所述第二直线l2的交汇点位于所述膝关节结构件。
6、3、根据技术方案2所述的膝关节结构,所述第一连接点和/或所述第三连接点与所述交汇点重合。
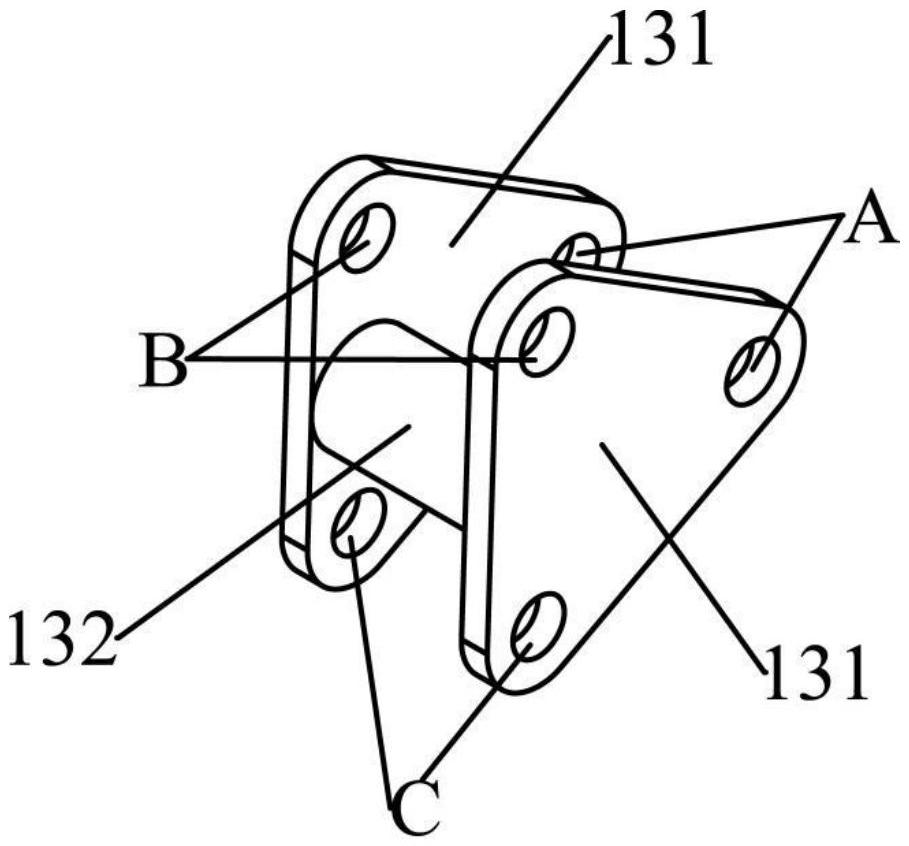
7、4、根据技术方案3所述的膝关节结构,所述膝关节结构件为三角形结构,三个顶点分别为第一顶点a、第二顶点b和第三顶点c;
8、所述第一连接点和/或所述第三连接点与所述第一顶点a重合,所述第二连接点与所述第二顶点b重合,所述第四连接点与所述第三顶点c重合。
9、5、根据技术方案1所述的膝关节结构,所述第一直线l1与所述第二直线l2的交汇点位于所述膝关节结构件之外。
10、6、根据技术方案5所述的膝关节结构,所述膝关节结构件为梯形结构,所述第一连接点、所述第二连接点、所述第三连接点和所述第四连接点分别位于所述梯形结构的四个顶点处。
11、7、根据技术方案1至6任一项所述的膝关节结构,所述第一直线l1与所述第二直线l2于所述膝关节结构件的前侧方向上交汇于一点;或
12、所述第一直线l1与所述第二直线l2于所述膝关节结构件的后侧方向上交汇于一点。
13、8、根据技术方案1至7任一项所述的膝关节结构,所述膝关节结构件为一体结构或包括多个结构单元的分体结构。
14、9、根据技术方案1至8任一项所述的膝关节结构,所述膝关节结构包括两个平行设置的所述膝关节结构件以及用于固定连接两个所述膝关节结构件的固定件。
15、10、一种机械腿,包括:
16、大腿结构,包括髋关节部和大腿部;
17、技术方案1至9任一项所述的膝关节结构;
18、小腿结构,包括小腿部和足部。
19、11、根据技术10所述的机械腿,所述大腿部包括:
20、大腿前部,上下两端分别与所述髋关节部的前侧和所述膝关节部的前侧转动连接;
21、大腿后部,上下两端分别与所述髋关节部的后侧和所述膝关节部的后侧转动连接;所述髋关节部、所述大腿前部、所述膝关节部和所述大腿后部构成平行四连杆结构;
22、第一推杆装置,上端连接于所述髋关节部,下端连接于所述大腿前部;所述大腿前部为主动件,所述大腿后部为从动件,所述大腿前部在所述第一推杆装置的驱动下可相对于所述髋关节部转动,且带动所述大腿后部同步相对于所述髋关节部转动。
23、12、根据技术方案11所述的机械腿,所述第一推杆装置具有第一上连接部与第一下连接部;
24、所述第一推杆装置通过所述第一上连接部连接于所述髋关节部,通过所述第一下连接部连接于所述大腿前部。
25、13、根据技术方案12所述的机械腿,所述第一上连接部位于所述第一推杆装置的两侧。
26、14、根据技术方案13所述的机械腿,所述第一推杆装置包括:
27、电机,下方两侧具有第一上连接部;
28、丝杠,连接于所述电机的输出轴;和
29、推杆,连接于所述丝杠,下端具有第一下连接部,且被配置为:当所述电机转动时,在所述丝杠的带动下沿所述电机的输出轴的轴向做直线运动。
30、15、根据技术方案11至14任一项所述的机械腿,所述大腿前部包括:
31、第一本体;
32、髋连接部,位于所述第一本体的上端,与所述髋关节部转动连接;
33、第一膝连接部,位于所述第一本体的下端,与所述膝关节部转动连接。
34、16、根据技术方案15所述的机械腿,所述第一本体包括第一前支撑件和分别与所述第一前支撑件两侧连接的一对第一侧支撑件;
35、所述髋连接部连接于所述第一前支撑件和/或第一侧支撑件的上端;
36、所述第一膝连接部连接于所述第一前支撑件和/或第一侧支撑件的下端。
37、17、根据技术方案15所述的机械腿,所述第一本体为具有第一容纳腔的壳体结构,所述第一推杆装置至少部分位于所述第一容纳腔中。
38、18、根据技术方案11至17任一项所述的机械腿,所述大腿后部包括一对第二侧支撑件,上下两端分别与所述髋关节部的后侧和所述膝关节部的后侧转动连接。
39、19、根据技术方案10至18任一项所述的机械腿,所述髋关节部包括髋支架,所述髋支架包括髋顶部和分别连接于所述髋顶部前后的髋前侧部和髋后侧部;
40、所述大腿前部与所述第一推杆装置转动连接于所述髋前侧部;所述大腿后部转动连接于所述髋后侧部。
41、20、根据技术方案19所述的机械腿,所述髋关节部还包括髋旋转关节模组,输出轴垂直地面且连接于所述髋顶部,用于驱动所述髋支架在水平面上绕所述髋旋转关节模组的输出轴转动。
42、21、根据技术方案10至20任一项所述的机械腿,所述小腿部包括:
43、小腿前部,上下两端分别与所述膝关节部的前侧和所述足部的前侧连接;
44、小腿后部,上下两端分别与所述膝关节部的后侧和所述足部的后侧连接;所述膝关节部、所述小腿前部、所述小腿后部和所述足部构成平行四连杆结构。
45、22、根据技术方案21所述的机械腿,所述小腿部还包括第二推杆装置,上端连接于所述大腿前部,下端连接于所述小腿前部。
46、23、根据技术方案22所述的机械腿,所述第二推杆装置具有第二上连接部和第二下连接部;
47、所述第二推杆装置通过所述第二上连接部连接于所述大腿前部,通过所述第二下连接部连接于所述小腿前部。
48、24、根据技术方案23所述的机械腿,所述第二上连接部分布于所述第二推杆装置的两侧。
49、25、根据技术方案24所述的机械腿,所述第二推杆装置包括:
50、电机,下方两侧具有第二上连接部;
51、丝杠,连接于所述电机的输出轴;和
52、推杆,连接于所述丝杠,下端具有第二下连接部,且被配置为:当所述电机转动时,在所述丝杠的带动下沿所述电机的输出轴的轴向做直线运动。
53、26、根据技术方案21至25任一项所述的机械腿,所述小腿前部包括:
54、第二本体;
55、第二膝连接部,位于所述第二本体的上端,与所述膝关节部转动连接;
56、足连接部,位于所述第二本体的下端,与所述足部转动连接。
57、27、根据技术方案26所述的机械腿,所述第二本体包括第二前支撑件和分别与所述第二前支撑件两侧连接的一对第三侧支撑件;
58、所述第二膝连接部连接于所述第二前支撑件和/或第三侧支撑件的上端;
59、所述足连接部连接于所述第二前支撑件和/或第二侧支撑件的下端。
60、28、根据技术方案26所述的机械腿,所述第二本体为具有第二容纳腔的壳体结构。
61、29、根据技术方案21至28任一项所述的机械腿,所述小腿后部包括一对第四侧支撑件,上下两端分别与所述膝关节部的后侧和所述足部的后侧转动连接。
62、30、根据技术方案29所述的机械腿,所述小腿后部为一体结构,其中,一对所述第四侧支撑件的下部为一体结构。
63、31、根据技术方案10至30任一项所述的机械腿,所述足部包括:
64、足板;
65、第一安装部,位于所述足板的前侧,与所述小腿前部连接;和
66、第二安装部,位于所述足板的后侧,与所述小腿后部连接。
67、32、一种双足机器人,包括两个技术方案12至31任一项所述的机械腿。
68、33、根据技术方案32所述的双足机器人,还包括腰部装置;两个所述机械腿分别位于所述腰部装置的两侧。
69、34、根据技术方案33所述的双足机器人,所述腰部装置包括:
70、腰部支架;
71、第一腰部关节模组,安装于所述腰部支架上,输出轴垂直地面,用于驱动所述腰部支架绕所述第一腰部关节模组的输出轴转动;
72、第二腰部关节模组,安装于所述腰部支架侧面,输出轴平行地面,用于驱动所述腰部支架绕所述第二腰部关节模组的输出轴转动。
73、本实用新型的上述技术方案具有如下优点:
74、膝关节结构件作为连接大腿部与小腿部的结构件,与大腿部转动连接的两个连接点位于第一直线l1,与小腿部转动连接的两个连接点位于第二直线l2,而第一直线l1与第二直线l2相交,无需复杂结构设计,可以显著降低机械腿的腿部重量和生产难度。而且,这使膝关节结构件与大腿部和小腿部构成三角约束关系,当大腿部发生运动时,小腿部在膝关节结构件的联动配合下发生相应的运动,便于实现大腿部带动小腿部运动。
- 还没有人留言评论。精彩留言会获得点赞!