一种多场景越障建筑机器人的制作方法
本发明属于建筑工程领域,具体涉及一种具备越障能力的机器人。
背景技术:
1、近年来,建筑机器人技术逐渐兴起,主要用于土建施工、主体工程和装修工程等建筑领域。建造智能化不仅可以极大地提高生产力,还能提升建筑产品的质量,对行业的发展有积极的推动作用。并且现在我国逐渐呈现人口老龄化的趋势,适龄劳动力增长规模预计将持续减少,从事建筑行业的人员数量也将越来越少,在建筑行业推行建造智能化是一个必须解决的课题。
2、由于施工现场环境复杂,面对复杂半结构化的施工环境,一个具备越障能力的机器人是推动建造智能化蓬勃发展的重要支撑。现有技术中通常使用履带式机器人来完成工作。例如公开号为cn116788354a的中国专利文件公开了一种履带式建筑机器人,其主要包含框架,框架底部固定有底框,且底框底部两侧安装有履带装置,其通过履带电机组件带动移动履带进行移动,上述建筑机器人在一定程度上实现了越障的功能。
3、但是面对不同的建筑施工场景,单纯的履带移动方式存在移速较慢,远距离移动效率较低的问题,往往只能适应单一场景的工作需求,适用性较差,无法满足现代多样化、复杂化的建筑需求。
技术实现思路
1、本实用新型的目的是提供一种多场景越障建筑机器人,其不仅具备翻越复杂地形的越障能力,还具备在平整地面高速移动的能力。可满足多种场景下的施工需求,工作效率高,适应性强。
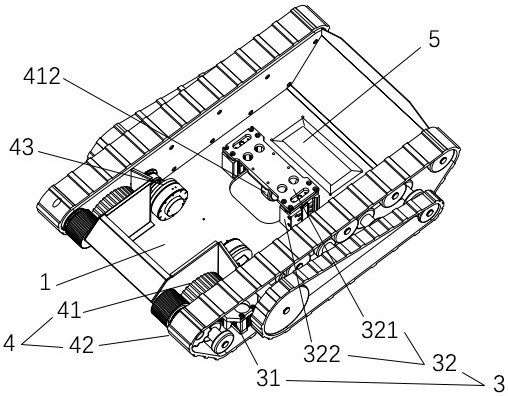
2、一种多场景越障建筑机器人,包含底盘和安装在所述底盘上的顶盖,其特征在于,还包含安装在所述底盘上的轮履切换组件和行进组件;所述行进组件包含用于在平地行走的车轮组件、用于越障的履带组件和动力组件;所述车轮组件和所述履带组件通过所述轮履切换组件切换不同的接地状态。
3、底盘用于为轮履切换组件和行进组件提供安装空间和支撑,其具体为具有较大容纳空间的金属壳体。轮履切换组件安装在底盘的容纳空间中,并且与车轮组件和履带组件连接,当轮履切换组件动作时,可以改变车轮组件和履带组件的接地状态;与此同时,动力组件为上述履带组件和车轮组件提供动力,以带动底盘行进。
4、当处于轮子状态时,轮履切换组件控制车轮组件接地,此时履带组件悬空,不与地面发生接触,车轮组件中的车轮与地面的摩擦力较小,可带动底盘快速行进,以满足平整地面高速移动的需求。
5、当处于履带状态时,轮履切换组件履带组件接地,此时车轮组件收回底盘中,履带组件中的履带与地面摩擦力较大,当施工现场存在沙石或其他障碍物时,履带将带动底盘翻越障碍物,以满足越障的需求。
6、顶盖覆盖在底盘上,并与底盘可拆卸连接,可保护底盘上安装的其他部件不被环境滚落物砸坏和雨水浸入。
7、作为本实用新型的优选,所述车轮组件包含与所述动力组件连接,由所述动力组件驱动的主动轮和用于配合该机器人调整行进方向的万向轮。
8、主动轮选用具备高摩擦性的材料制作,例如橡胶,可提高与地面的摩擦力,降低该机器人在行进中出现打滑的概率。在底盘前部对称安装两个主动轮可以平衡车体;万向轮安装在车体中后部,其轮体可进行全向旋转,当两个主动轮的转动速度不同时,配合万向轮即可实现向不同方向的拐弯的功能。
9、作为本实用新型的优选,所述履带组件包含负责带动所述底盘行进的主履带和辅履带;还包含分别用于带动所述主履带和所述辅履带转动的主履带主动轮和辅履带主动轮;以及为履带提供支撑的主履带从动轮、主侧板和辅侧板。
10、履带组件用于该机器人越障翻越使用。两块主侧板左右垂直安装在底盘上,用于为履带组件提供安装和支撑。每块主侧板外侧均安装有个主履带主动轮和个主履带从动轮,两轮之间还设置有若干无动力支撑轮,主履带围绕上述各轮设置,由主履带主动轮带动主履带转动。该主履带具备较大的宽度,作为主要的行进履带使用。
11、在上述主履带外侧还平行设置有辅侧板,辅侧板上安装有辅履带主动轮和其他支撑轮,其上设置有辅履带,行进时,辅履带主动轮带动辅履带转动。
12、辅履带的设置扩展了履带结构的横向宽度,并且主履带和辅履带分别由不同的主动轮驱动,因此动力输出具备不同时的优点,面对复杂地形时,可以分别调控不同履带的输出时间点和速度,以组合实现不同的动力模式。例如,当该机器人在攀爬楼梯时,履带和台阶至少有3点接触,可减缓车体在攀爬楼梯时的震动;并且在其卡在某节台阶时,可单独驱动某条与台阶接触面积较大的履带,帮助翻越,增加越障能力。
13、作为本实用新型的优选,所述轮履切换组件包含主动轮切换机构和万向轮升降机构,所述主动轮切换机构与所述主动轮连接,用于带动所述主动轮升降移动;所述万向轮升降机构与所述万向轮连接,用于带动所述万向轮升降移动。
14、主动轮切换机构与主动轮连接,可带动主动轮进行竖直方向的的位移;每个主动轮均与一个主动轮切换机构连接。万向轮升降机构与万向轮连接,可带动万向轮进行竖直方向的的位移。当主动轮切换机构与万向轮升降机构同时控制主动轮和万向轮做相同幅度的位移时,可实现该机器人车轮组件的全面接地。
15、主动轮切换机构和万向轮升降机构均可以采用现有技术中的小型气缸作为动力。
16、作为本实用新型的优选,所述主动轮切换机构包含第一气缸、与所述主履带主动轮共轴连接的摩擦轮和与所述第一气缸连接的导轨座;所述主动轮还与所述导轨座连接。
17、第一气缸安装在主侧板外侧,其动作时可带动导轨座同向位移,主动轮位于主侧板内侧,并与导轨座连接,两者通过穿过主侧板的连接杆连接,可同步运动。摩擦轮安装在主侧板内侧,其安装靠近主动轮,当主动轮由第一气缸带动运动至高位点时,摩擦轮与主动轮抵触,此时主动轮转动时可带动摩擦轮转动。由于摩擦轮与主履带主动轮共轴连接,故可以同步带动主履带主动轮转动,最终带动主履带转动,实现履带模式下的行进。
18、作为本实用新型的优选,所述动力组件包含安装在所述主侧板上的且用于驱动所述辅履带主动轮旋转的第一电机和安装在所述导轨座上的且用于驱动所述主动轮转动的第二电机。
19、第一电机与第二电机均可以选用现有技术中的小型伺服电机,其中第一电机安装在主侧板上,用于驱动辅履带主动轮旋转,进而带动辅履带运动。第二电机安装在导轨座上,跟随导轨座同步运动,用于驱动主动轮进行转动,作为在轮子模式和履带模式下的主要驱动力量来源。
20、作为本实用新型的优选,所述万向轮升降机构包含固定在所述底盘上的万向轮支架和安装在所述万向轮支架的第二气缸。
21、万向轮升降机构负责控制万向轮的收起与放下动作,其动力来源于第二气缸,第二气缸的输出轴与万向轮固定连接,第二气缸自身安装固定在万向轮支架上,万向轮支架与底盘固定连接。由此,可通过气缸动力控制万向轮相对于底盘的位置。
22、作为本实用新型的优选,该机器人还包含用于控制所述动力组件和所述主动轮切换机构和所述万向轮升降机构的控制器。
23、控制器可使用现有技术中的嵌入式技术,使用控制单片机对与其连接的动力组件、主动轮切换机构和万向轮升降机构发送控制指令,实现多样的电机驱动模式,并通过控制气缸的动作实现主动轮切换机构和万向轮升降机构对主动轮和万向轮升降时机的选择,以自动化切换该机器人的轮子模式和履带模式,以满足多场景的使用需求。
24、作为本实用新型的优选,该机器人还包含安装在所述顶盖上的,且与所述控制器电连接的传感器,所述传感器用于识别周围环境。
25、传感器可选用现有技术中的激光雷达、距离传感器、红外传感器或图像识别摄像头等。例如,当选用激光雷达时,将其安装在顶盖上,激光雷达在工作时将持续扫描周围环境,并将数据发送给与其连接的控制器,作为控制器做出路径规划和模式调整的数据依据。激光雷达可安装多个,例如在车头和车尾各安装一个,以尽可能的缩小扫面盲区。
26、作为本实用新型的优选,该机器人还包含安装在所述顶盖上的机械臂,所述机械臂包含活动臂和安装在所述活动臂末端的操作手。
27、机械臂可选用现有技术中的jaka六自由度机械臂,配合其末端安装的不同操作手,可实现多种功能,例如抓取、探照、夹持等。对于某些空间狭小的施工场景,可代替人工实现一些特殊的安装操作。
28、综上所述,本实用新型具有如下的有益效果:
29、1.通过设置轮履切换组件,可以使得该越障建筑机器人根据不同场景选择不同的行进模式,当遇到复杂路面时,可自动切换履带模式,以翻越例如石块、沟壑和台阶等障碍物;当遇到平整路面时,可切换轮子模式,以快速行进,节省时间按提高效率。
30、2.通过设置辅履带,可以拓宽单侧履带的接地面积,同时增加不同的履带驱动组合,面对复杂地形时,可以通过选择不同的履带和不同的转动方向来获得最佳的通过性。
31、3.通过设置传感器和机械臂,可以使得该越障建筑机器人的自动工作能力得到大幅提升,可更好的适应现代环境下的高质量施工需求。
- 还没有人留言评论。精彩留言会获得点赞!