手轮致动器组件的制作方法
本发明涉及一种在车辆的线控转向系统中使用的手轮致动器组件。
背景技术:
1、电动马达被广泛用于机动车辆应用中并在机动车辆应用中越来越常见。例如,已知提供一种电动动力辅助转向系统,其中,电动马达设备向转向系统的一部分施加辅助转矩,以使驾驶员更容易转动车辆的方向盘。辅助转矩的量值根据控制算法来确定,该控制算法接收一个或多个参数(比如通过驾驶员转动方向盘向转向柱施加的转矩、车辆速度等)作为输入。
2、电动马达在机动车辆应用中的使用的另一个示例是线控转向系统。在正常使用期间,这些系统与驾驶员所运动的手轮、和转向车轮没有直接的机械连结。这些系统依靠传感器将方向盘处的用户输入数据转发到控制单元,这些控制单元将用户输入数据与其他信息(比如车辆速度和横摆速率)相结合,以将控制信号递送到物理致动车辆的转向齿条的主马达。控制单元还用于过滤掉来自前车轮的不需要的反馈,并向联接到方向盘的次级电动马达提供响应信号。次级马达响应于方向盘处的特定用户输入而为驾驶员提供适当的阻力和反馈,以模仿常规转向系统的感觉。该次级马达连接到通过齿轮组支撑手轮的轴,这三个零件共同形成手轮致动器组件。
3、线控转向系统中的马达典型地由定子构造,定子包括沿轴向方向堆叠在一起的叠片。这是制造马达的有成本效益的方式,而且通过在堆叠体中的每个叠片之间施加电绝缘涂层,防止电流轴向流过定子。这减少了马达内的能量损失,因为沿该方向流动的电流不利于马达产生转矩。这种现有技术的马达构造由于消除或严格限制轴向流动的电流而表现出低水平的阻力矩(drag torque/拖曳力矩)。
4、本说明书中使用的术语“阻力矩”是指马达在旋转时产生的转矩,该转矩与施加以驱动马达的任何转矩相反。所有相都开路且阻力矩几乎为零的马达的转子只需施加少量的外部转矩就可以旋转,阻力矩非常高的马达的转子将需要同样高或更高的外部转矩才能使定子旋转。
5、在线控转向系统中,组件的一部分的失灵或故障可能会损害使车辆转向的能力。因此,期望提供具有用于提供至少暂时的故障安全操作的结构的组件。us 2006/0042858a1公开了包括转向组件的转向设备,该转向组件包括手轮致动器。手轮致动器包括用于支撑方向盘的转向柱、传动机构和两个马达,这两个马达各自用于向转向柱提供转矩。单马达手轮致动器组件也是已知的。
6、当线控转向系统通电并正确工作时,hwa对承载手轮的轴施加转矩,该转矩抵抗驾驶员转动方向盘轴。对于系统的大部分操作,手轮致动器内的一个或多个马达操作以对驾驶员产生受控阻力。这可以用来让驾驶员感觉到车轮和路面之间的交接处发生的情况,否则,这种感觉会随着从手轮到车轮的机械连结的移除而消失。
7、手轮能够自由旋转是不期望的,而驾驶员总是能够克服的少量运动阻力始终是期望的。优选地,该运动阻力是恒定的或者与手轮速度成比例,以实现良好的转向感觉。在现有技术中,已知的是通过使用称为制动转矩的原理吸收马达驱动电子器件内的能量来提供运动阻力。当在马达各相中存在至少一个闭合电路(马达旋转时产生的电流将在该闭合电路中流动)时,产生制动转矩。这需要对马达驱动电路进行主动控制,以操作(典型地是闭合)适当的相开关并强制马达中的电路闭合。
8、申请人已经认识到,即使从系统中移除电功率,也期望该阻力应该存在。在通过向马达施加适当的电流来实现阻力的情况下,在马达内无法供应或产生电流的故障情况下,该阻力将被移除。
技术实现思路
1、根据本发明的第一方面,提供了一种用于车辆的线控转向系统的手轮致动器组件,该手轮致动器组件包括:
2、壳体;
3、轴,该轴相对于壳体可旋转地安装,轴可连接至手轮;
4、一个或多个马达,每个马达具有定子和转子,该定子承载多个相绕组,并且该转子承载多个磁极并连接到轴;
5、控制电路,该控制电路适于控制流入或流出该马达或每个马达的电流,以在正常操作期间引起施加到轴的净转矩,并且
6、其中,这些马达中的至少一个马达的定子被配置成使得在控制电路断电或断开连接并且手轮以每秒180度旋转的情况下,这些马达的组合总体上提供轴的旋转阻力的至少50%的阻力矩并在手轮处提供至少2nm的转矩。
7、通过提供一个或多个马达(其中至少一个马达提供相当大且有用的阻力矩水平),驾驶员必须在180度/秒的手轮速度下施加至少2nm的转矩,以保持手轮180度/秒的恒定转速,因为在使用任何额外转矩来使手轮加速之前必须克服该阻力。在汽车手轮致动器应用中,这种阻力水平通常被认为是可接受的。如果阻力水平太低,转向感觉太轻并且可能太容易在高速下转动(包括稳定性),但如果阻力水平太高,可能会使转向太重,驾驶员可能难以转动手轮并操纵车辆。
8、本发明提供了对反之则会不受控制的旋转的阻尼,而无需电子器件、额外的机械部件或复杂机制来在功率移除、马达断开连接或在导致控制单元无法电气操作的某些故障条件下防止方向盘自由旋转。如从现有技术中已知的,消除了驱动电路中能量损失的需要保护了电路免受由于热量积聚而造成的损坏,并将热损失转移到可以被更好地管理的马达中。
9、马达的定子可以被配置成在马达使用期间由于定子内的涡电流、磁滞和其他损耗(其他损耗通常称为超额损耗或异常损耗)的组合而引起阻力矩的产生。
10、定子可以通过在定子内包含一个或多个导电闭环路径来提供所需水平的阻力矩,变化的磁通量可以流经这些导电闭环路径。在常规的现有技术马达中,这些轴向路径通过使用层压定子而被很大程度上阻挡,其中每个叠片与相邻的一个叠片电绝缘。
11、定子可以包括实心定子,例如通过铸造、增材制造、放电机加工或以其他方式由坯料机加工而形成为整体元件。马达可以包括未层压的实心定子。马达可以包括由粘合铁粉制成的一组齿。
12、与对于定子使用一叠绝缘层压板并且其他方面相同的马达相比,实心定子将具有更高的阻力矩。
13、在替代方案中,定子可以包括一叠叠片,其中至少一个叠片各自通过低电阻导电路径电连接至相邻的一个或多个叠片。在每个叠片相连接的情况下,这种布置可以提供与真正的实心定子基本上相同的电特性。
14、在另一替代方案中,定子可以包括两个或更多个轴向布置的大厚度叠片,这些叠片可以电连接或通过绝缘体间隔开,每个叠片具有轴向地测量的至少1mm或至少2mm或至少4mm或5mm的厚度。现有技术的层压定子将使用大约0.5mm或更薄的叠片,基本上防止任何轴向通量在定子中流动,
15、在定子是使用一叠叠片形成的情况下(每个叠片通过电绝缘体与相邻的一个或多个叠片间隔开),叠片可以通过一条或多条焊接线连接,这些焊接线沿着定子在基本上正交于通量流的方向上延伸,并且其中焊接线与定子材料一起形成闭合电路以使电流在回路中流动。
16、在现有技术的定子中,焊接线位于定子的外周上。这些焊接线的位置与叠片之间的绝缘间隔件相结合防止了大量通量被闭合导电回路包围。焊接线将叠片刚性地固定在一起。发明人已经认识到,这些焊接线可以有利地放置在形成闭合导电回路的区域中,当马达旋转时变化的磁通量穿过该闭合导电回路。
17、定子可以包括一组齿,这组齿从外约束环向内朝向与定子同心定位且位于定子内部的转子突出,该一条或多条焊接线形成在至少一个齿的一侧或两侧上。
18、这些齿可以与约束环成一体,每个叠片包括具有向内突出的齿的环。
19、马达的定子可以被配置成提供阻力矩,与通过使用电工钢而最佳地降低阻力矩并具有层压定子(其中每个叠片与相邻叠片绝缘)的其他方面相同的马达相比,该阻力矩随着轴的转速而更快地增加。
20、马达包括的定子可以被构造和布置为使得与由根据无取向电工钢规范din en10106:2016-03(以下称为m470-50a规范)的电工钢m470-50a的叠片构成、并且叠片彼此电绝缘的层压结构制成的定子相比,当手轮以180度/秒旋转时,该定子贡献的阻力矩是至少4倍大。
21、马达可以如此构造和布置成与除了使用包括满足m470-50a规范的胶合在一起的电工钢叠片的定子叠片之外相同的马达相比,在手轮以180度/秒旋转时提供至少10倍大的阻力矩。
22、上述手轮致动器特性的定义假设机械摩擦在阻止手轮旋转方面的影响是可忽略的。实际上,它们不可忽略,并且实际上可能在非常低的手轮转速下占主导地位。当然,在非常低的手轮转速下,产生的阻力矩将低于较高速度下的阻力矩,但是如果在180度/秒或更高的手轮速度下实现所需的阻力矩,则这被认为通常是可接受的。
23、从另一个角度来看,手轮致动器的马达定子可以被配置成使得不包括铜绕组的马达定子组件具有至少30瓦/kg的有效单位质量损耗。这个数字大于电机、特别是现有的汽车电动辅助转向组件中使用的任何标准电工钢。
24、马达可以被配置成对于至少一个速度提供该范围内至少60%的旋转阻力,或者在非零转速范围内提供至少70%、或80%、或基本上所有的阻力矩。马达可以向驾驶员使手轮旋转并因此使轴旋转提供所有或基本上所有的阻力,这意味着比组件中存在的机械摩擦提供的任何阻力大至少一个数量级。这种摩擦将发生在轴承内和齿轮齿的啮合中。
25、马达可以被配置成在手轮的非零转速的大范围内提供至少2nm的阻力矩。
26、马达可以被配置成对于正常操作范围内的至少一个非零手轮速度提供至少3nm的阻力矩,或者至少5nm或更多。
27、马达包括的定子可以包括不满足m470-50a标准的损耗(w/kg)要求的有损耗钢。
28、该钢可以包括低硅含量钢,并且可以具有按重量计小于1%的硅。
29、可以用于形成本发明的手轮致动器组件的定子的钢的示例是易切削低碳钢,比如en1a或astm 1215,其中阻力矩主要由于涡电流损耗产生。
30、可以用于形成本发明的手轮致动器组件的定子的钢的示例是c75碳弹簧钢(该碳弹簧钢可以以0.5mm厚的片材的形式提供),其中阻力矩主要由于磁滞损耗产生。
31、该钢定子材料可以具有相比电工钢、比如m470-50a至少20倍的矫顽力,或至少30倍的矫顽力。
32、制造定子的材料可以在根据astm标准a927/a927m–11(使用电压表-电流表-瓦特计法测定环形铁芯试样交流磁特性的标准试验方法)进行测试时,当用振幅为1特斯拉且频率为50hz的正弦磁通密度激励时,具有大于30w/kg的特定总损耗。
33、马达可以包括未层压的实心定子。整个定子可以是一个实心块,或者定子可以包括单独的齿,这些齿是实心的并且形成为沿着转子轴向地延伸的整体元件并且不是层压的。这些齿可以固定在一起以形成定子。
34、与对于定子使用一叠绝缘层压板且其他方面相同的马达相比,这将具有更高的阻力矩。这可以使用上述类型的损耗更大的钢或电工钢。
35、替代性地,马达可以包括由一叠相对较薄的金属板形成的层压定子,其中在堆叠体中的两个或更多个相邻板之间提供至少部分面对面的直接接触。
36、该堆叠体可以包括未涂覆的钢板,这些钢板与一些或所有板直接接触。
37、通过使用实心定子或一叠接触的层压板,电流可以轴向流动,与传统的绝缘层压定子相比,提供更高的阻力矩。
38、电工钢板通常带有绝缘涂层,比如c-4或c-5(根据aisi绝缘名称),这减少了板之间的涡电流。
39、本发明的手轮的定子可以包括涂有导电保护涂层的钢叠片。保护涂层可以提供防止钢生锈的保护。合适的涂层的示例是锡,另一示例是锌。
40、马达的转矩阻力可以在180度/秒的轴转速下提供轴的旋转阻力的至少60%、或至少70%或更高。马达可以向驾驶员使手轮旋转并因此使轴旋转提供所有或基本上所有的阻力,这意味着比组件中存在的机械摩擦提供的任何阻力大至少一个数量级。这种摩擦将发生在轴承内和齿轮齿的啮合中。
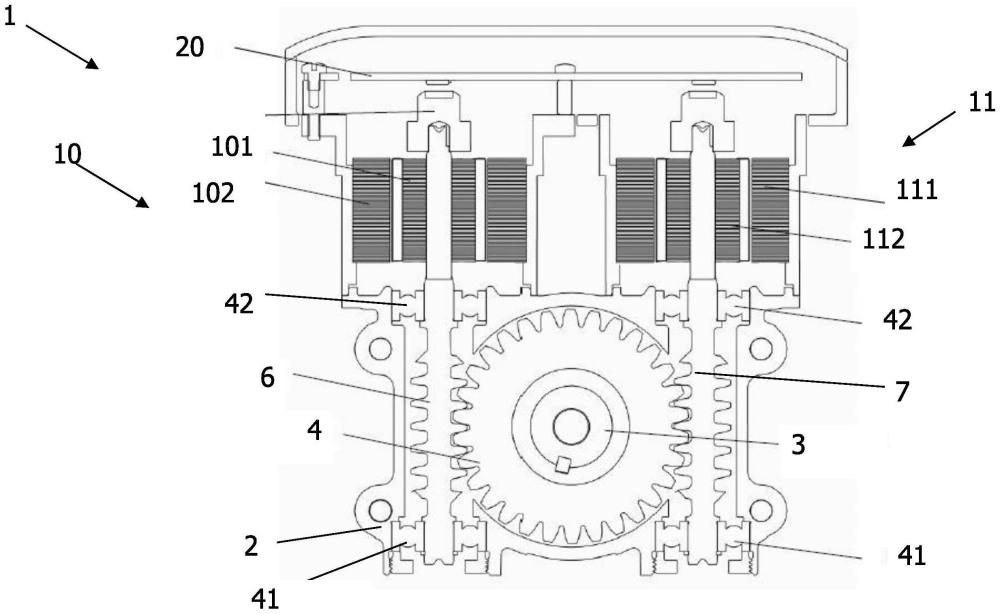
41、手轮致动器可以包括齿轮箱,齿轮箱包括相对于轴固定的第一传动机构以及相对于马达的输出固定的第二传动机构,第一传动机构的旋转引起第二传动机构的旋转。
42、两个传动机构可以直接啮合,也可以通过带彼此连接。手轮致动器可以包括:第二传动机构,该第二传动机构连接到轴并被配置成与轴一起旋转;以及第二马达,该第二马达具有驱动相应第二输出传动机构的输出,第二输出传动机构与第一传动机构并且因此与轴接合。
43、该第二马达还可以产生相当大的阻力矩,使得当马达未通电时,来自两个马达的阻力矩的总和对手轮的转动提供相当大的阻力。
44、替代性地,第二马达可以具有使用电工钢作为转子更常规的构造,使得第二马达在未通电时不会在总体旋转阻力中发挥重要作用。因此,与第二马达相比,第一马达可以提大得多的阻力矩,例如至少两倍的阻力矩。
45、该马达可以包括无刷永磁型马达,该无刷永磁型马达包括转子和定子,该定子具有围绕规则周向间隔开的齿的许多绕组。
46、该轴可以通过轴一端上的花键连接器直接连接至手轮,该轴装配在手轮的内花键连接器中。因此,轴将以与手轮相同的速度旋转。马达如果直接连接到轴也以相同的速度旋转。如果马达通过齿轮箱连接到轴,它们将以与手轮不同的速度旋转。
47、替代性地,轴可以通过齿轮箱连接到手轮。在这种情况下,轴的转速可能与手轮的转速不同。
- 还没有人留言评论。精彩留言会获得点赞!