一种电助力一体式主动转向系统及装配有所述系统的车辆
本技术涉及汽车转向,尤其涉及电助力一体式主动转向系统及装配有所述系统的车辆。
背景技术:
1、转向系统是决定横向汽车稳定性的关键执行部件。为了提升汽车的横向稳定性,主动转向系统得以研发并取得广泛应用。主动转向系统在传统转向系统的基础上,通过机电装置叠加一个主动转向角,能够根据实时车况自主调整汽车转向轮转角,进而保障汽车复杂工况下的横向稳定性。在此基础上,为了兼顾汽车主动转向系统的转向轻便性,具备助力转向功能的主动转向系统已成为当前研发的重点。
2、目前,具备助力转向功能的主动转向系统主要采用分体设计的方案,即助力转向模块和主动转向模块独立设计开发,涉及主动转向电机和助力电机两套电机硬件;另外,助力转向模块和主动转向模块主要采用电机和机械传动装置(蜗轮蜗杆、行星齿轮等)组合的方式实现。上述方案存在以下问题:1、主动转向模块和助力转向模块分体设计容易导致汽车主动转向系统集成度低、体积大和质量重等问题,安装、使用不便;2、主动转向模块和助力转向模块分体设计需采用两套电机硬件,成本高;3、机械传动装置固有的摩擦、磨损、老化和卡死等特性,严重恶化主动转向系统的可靠性。
技术实现思路
1、本技术旨在至少在一定程度上解决相关技术中的技术问题之一。
2、为此,本技术的第一个目的在于提出一种电助力一体式主动转向系统,解决了现有方法中主动转向模块和助力转向模块分体设计导致的汽车主动转向系统集成度低、体积大、质量重和成本高的技术问题,同时解决机械传动装置摩擦、磨损、老化和卡死等问题导致的主动转向系统可靠性低的问题,能够大幅提升主动转向系统的效率和可靠性。
3、本技术的第二个目的在于提出一种车辆。
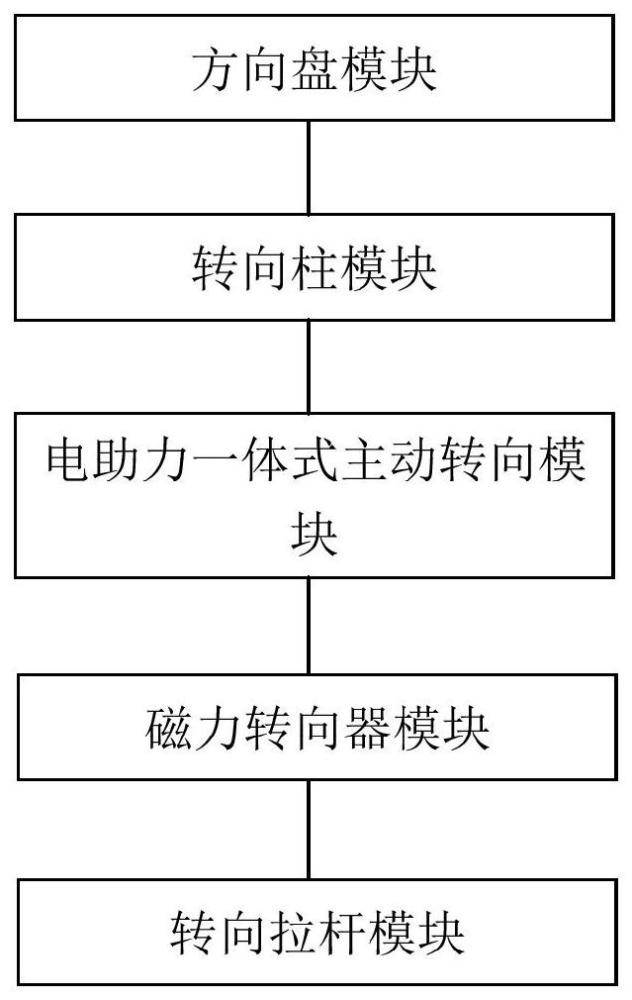
4、为达上述目的,本技术第一方面实施例提出了一种电助力一体式主动转向系统,包括方向盘模块、转向柱模块、电助力一体式主动转向模块、磁力转向器模块和转向拉杆模块,其中,
5、方向盘模块,用于给定驾驶员的转向输入;
6、转向柱模块,用于检测方向盘模块的输入转矩和输入转角;
7、电助力一体式主动转向模块,用于生成转向助力转矩和主动转向角,并与输入转矩和输入转角叠加;
8、磁力转向器模块,用于将来自电助力一体式主动转向模块的旋转运动转化为直线运动;
9、转向拉杆模块,用于在磁力转向器模块直线运动的推动下,带动转向轮转向。
10、本技术实施例的电助力一体式主动转向系统,采用一个双转子电机和一个行星磁齿轮构成助力转向和主动转向一体化的设计方案,将主动转向电机和助力电机集成设计为一个双转子电机,具有集成度更高、结构更紧凑、重量更轻、成本更低等显著优势,本技术取消了机械传动装置,从根本上避免了机械传动装置造成的不必要的功率损耗,大幅提升了主动转向系统效率,从根本上消除了机械传动装置固有摩擦、磨损、老化和卡死等特性导致的可靠性低的问题,大幅提升了主动转向系统的可靠性。
11、可选地,在本技术的一个实施例中,转向柱模块包括转向柱和传感器,转向拉杆模块包括转向横拉杆、转向节臂和转向节,电助力一体式主动转向模块,具体用于:
12、为主动转向系统提供转向助力转矩,并与输入转矩叠加;
13、为主动转向系统提供主动转向角,并采用磁力矩耦合传输的方式,将主动转向角和输入转角固定比例叠加。
14、可选地,在本技术的一个实施例中,电助力一体式主动转向模块采用双转子电机和行星磁齿轮耦合的设计方式,电助力一体式主动转向模块包括转向电机定子、转向电机外转子、转向电机内转子、永磁外齿圈、永磁行星转子、永磁太阳转子、电磁离合器、轴承和外壳体,其中,
15、转向电机定子固定于外壳体,保持静止;
16、转向电机外转子与永磁外齿圈固定连接、同步旋转;
17、转向电机内转子与转向柱模块、永磁太阳转子固定连接、同步旋转;
18、电磁离合器设置于永磁外齿圈与外壳体之间;
19、永磁行星转子与磁力转向器模块固定连接、同步旋转。
20、可选地,在本技术的一个实施例中,转向电机定子包括转向电机定子绕组一、转向电机定子绕组二、转向电机定子磁障和转向电机定子铁心,转向电机定子绕组一、转向电机定子绕组二和转向电机磁障固定于转向电机定子铁心,且转向电机定子绕组一和转向电子定子绕组二分别布置于转向电机定子磁障的外侧和内侧;
21、转向电机外转子包括转向电机外转子永磁阵列和转向电机外转子铁心,转向电机外转子永磁阵列固定于转向电机外转子铁心的内侧。
22、转向电机内转子包括转向电机内转子永磁阵列和转向电机内转子铁心,转向电机内转子永磁阵列固定于转向电机内转子铁心的外侧;
23、永磁外齿圈包括外齿圈永磁阵列和外齿圈铁心,外齿圈永磁阵列固定于外齿圈铁心的内侧;
24、永磁行星转子包括行星轮和行星架,行星轮包括行星轮永磁阵列和行星轮铁心,行星轮永磁阵列固定于行星轮铁心的外侧;
25、永磁太阳转子包括太阳转子永磁阵列和太阳转子铁心,太阳转子永磁阵列固定于太阳转子铁心的外侧。
26、可选地,在本技术的一个实施例中,电助力一体式主动转向模块的助力电机和主动转向电机为一体化设计,
27、转向电机定子绕组二和转向电机内转子构成第一通用永磁电机,经转向电机内转子输出转向助力转矩;
28、转向电机定子绕组一和转向电机外转子构成第二通用永磁电机,经转向电机外转子输出主动转向角;
29、永磁外齿圈、永磁行星转子和永磁太阳转子构成永磁行星磁齿轮,将来自转向电机外转子的主动转向角与来自转向电机内转子的驾驶员输入转角固定比例叠加,经永磁行星转子耦合输出。
30、可选地,在本技术的一个实施例中,外齿圈永磁阵列、行星轮永磁阵列和太阳转子永磁阵列均采用径向充磁方式,且同一圆周侧面依据n级-s级的交替方式布置,外齿圈永磁阵列、行星轮永磁阵列和太阳转子永磁阵列的极对数、尺寸所满足的条件表示为:
31、
32、其中,pasr表示外齿圈永磁阵列的极对数,pass表示行星轮永磁阵列的极对数,pasp表示太阳转子永磁阵列的极对数,rrg表示外齿圈永磁阵列的半径,rsg表示行星轮永磁阵列的半径,rpg表示太阳转子永磁阵列的半径。
33、可选地,在本技术的一个实施例中,磁力转向器模块采用两自由度调速磁齿轮,磁力转向器模块包括磁齿轮转子部件、磁齿轮调磁部件、磁齿轮动子部件、磁齿轮轴承和磁齿轮外壳体,其中,
34、磁齿轮转子部件与永磁行星转子固定连接、同步旋转。
35、磁齿轮调磁部件固定于磁齿轮外壳体,保持静止。
36、磁齿轮动子部件在磁齿轮转子部件和磁齿轮调磁部件的磁力耦合作用下,执行直线运动;
37、磁齿轮轴承包括磁齿轮旋转轴承和磁齿轮直线轴承。
38、可选地,在本技术的一个实施例中,磁齿轮转子部件包括磁齿轮转子永磁阵列磁和齿轮转子铁心,磁齿轮转子永磁阵列固定于磁齿轮转子。
39、磁齿轮调磁部件包括导磁介质和非导磁介质,磁齿轮调磁部件依据导磁介质-非导磁介质的交替方式布置。
40、磁齿轮动子部件包括磁齿轮动子永磁阵列和磁齿轮动子铁心,磁齿轮动子永磁阵列固定于磁齿轮动子铁心。
41、磁齿轮旋转轴承设置于磁齿轮转子部件和磁齿轮外壳体之间,用于支撑磁齿轮转子部件的旋转运动;
42、磁齿轮直线轴承设置于磁齿轮动子部件磁齿轮外壳体之间,用于引导磁齿轮动子部件的直线运动。
43、可选地,在本技术的一个实施例中,磁齿轮转子永磁阵列和磁齿轮动子永磁阵列均采用径向充磁方式,且同一侧面依据n极-s极的交替方式布置,磁齿轮转子永磁阵列、磁齿轮调磁部件和磁齿轮动子永磁阵列的极对数所满足的条件表示为:
44、ptm=ptd+ptr
45、其中,ptm是磁齿轮调磁部件的极对数,ptd是磁齿轮动子永磁阵列的极对数,ptr是磁齿轮转子永磁阵列的极对数。
46、为达上述目的,本发明第二方面实施例提出了一种车辆,包括上述的电助力一体式主动转向系统。
47、本技术附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!