一种基于信息融合转向路感模拟计算方法、装置及车辆与流程
本发明涉及智能驾驶,尤其涉及一种基于信息融合转向路感模拟计算方法、装置及车辆。
背景技术:
1、由于人工智能技术和计算机技术的飞速发展,汽车产业技术快速迭代更新,传统汽车向智能驾驶方向发展,而转向系统则是智能驾驶系统中关键的一环。转向系统一方面在车辆行驶过程中按照驾驶员对转向盘的操作进行转向,实时地改变汽车的行驶方向;另一方面转向系统将行驶过程中地面对轮胎的反馈力传递给方向盘,以转向盘力矩的形式传递给驾驶员,即称为“路感”,帮助驾驶员获得行驶过程中汽车与道路所传递的反馈信息,进而对驾驶操作进行修正。转向系统的优劣,将会直接影响汽车行驶的安全性以及驾驶员的操纵舒适性等。
2、目前,电动助力转向系统(electric power steering, eps)因成本的降低而得到广泛地应用,其由助力电机根据车速和转向盘或转向力矩的不同,主动控制输出力矩实现转向功能,进而使得驾驶员获得良好的操控。但eps系统中转向盘通过机械部件与转向车轮相连,方向盘与转向轮之间都有机械结构的束缚,不能实现转向系统的自由设计,因此实际的控制效果有限。
3、线控转向系统(steer-by-wire system, sbw)在结构上摒弃了传统的机械连接的转向模式,取消了转向中间轴,转向盘与转向车轮之间不存在机械结构上的束缚,实现了在不影响转向盘总成的前提下直接控制转向执行机构的功能,能够轻松完成变传动比设计、方向盘力传递与角传递的解耦等,能够更好地在转向系统中融入主动安全装置提高驾驶的安全性;同时,线控转向系统在功能实现上采用模块化思想,由各种传感器通过总线网络完成信息交互,有利于汽车的电动化、集成化、智能化的发展。
4、然而,由于线控转向系统取消了方向盘与转向轮之间的机械结构,路面对轮胎的反馈力无法直接传递到方向盘上,在行驶过程中驾驶员无法感受到路面的状况,即“路感”,导致驾驶安全性的降低。出于驾驶安全性和可操纵性的考虑,路感模拟计算出反馈值是线控转向系统不可或缺的重要组成功能,为此研发出一种基于信息融合转向路感模拟计算方法。
技术实现思路
1、本发明的目的在于提供一种基于信息融合转向路感模拟计算方法、装置及车辆,解决了由于线控转向系统取消了方向盘与转向轮之间的机械结构,路面对轮胎的反馈力无法直接传递到方向盘上,在行驶过程中驾驶员无法感受到路面的状况,也就是指无法得到路感模拟反馈力值,即“路感”,导致驾驶安全性的降低的问题。
2、第一方面,本发明提供一种基于信息融合转向路感模拟计算方法,应用于将齿轮齿条转向器作为转向机构的线控转向系统,包括;
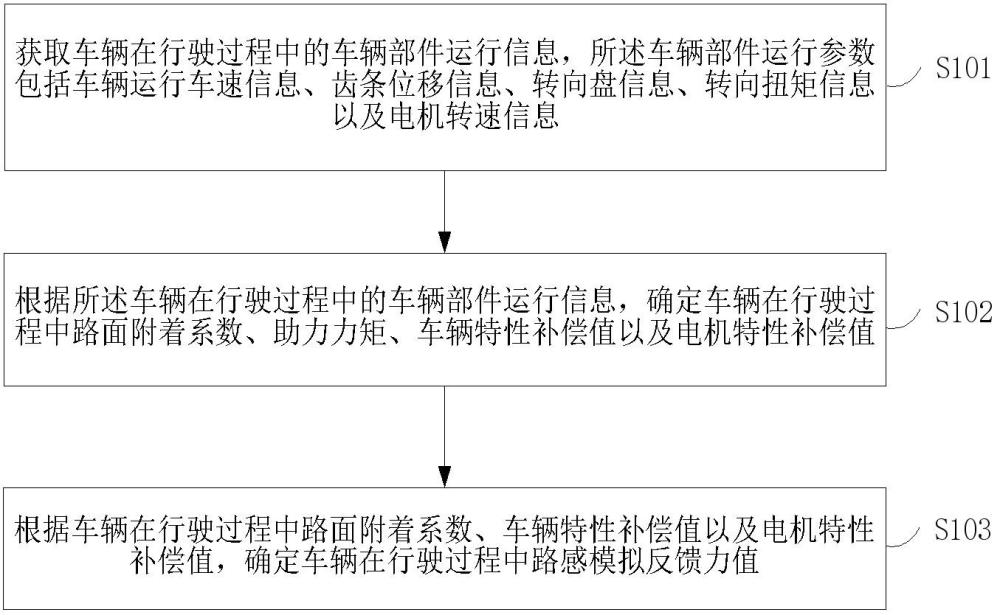
3、获取车辆在行驶过程中的车辆部件运行信息,所述车辆部件运行参数包括车辆运行车速信息、齿条位移信息、转向盘信息、转向扭矩信息以及电机转速信息;
4、根据所述车辆在行驶过程中的车辆部件运行信息,确定车辆在行驶过程中路面附着系数、助力力矩、车辆特性补偿值以及电机特性补偿值;
5、根据车辆在行驶过程中路面附着系数、车辆特性补偿值以及电机特性补偿值,确定车辆在行驶过程中路感模拟反馈力值。
6、进一步地,确定车辆在行驶过程中路面附着系数、助力力矩、车辆特性补偿值以及电机特性补偿值,包括;
7、将所述齿条位移信息进行齿条力滤波降噪,得到齿条力滤波降噪后的齿条位移信息;
8、根据所述齿条力滤波降噪后的齿条位移信息与所述车辆运行车速信息,确定得到反馈力中主要力矩。
9、进一步地,确定车辆在行驶过程中路面附着系数、助力力矩、车辆特性补偿值以及电机特性补偿值,包括;
10、所述转向盘信息包括转向盘角度信息以及转向盘角速度,根据转向盘信息包括转向盘角度信息以及转向盘角速度,确定得到助力力矩。
11、进一步地,确定车辆在行驶过程中路面附着系数、助力力矩、车辆特性补偿值以及电机特性补偿值,包括;
12、根据反馈力中主要力矩与所述助力力矩,确定预处理力矩数据;
13、将所述预处理力矩数据代入至预设的无迹卡尔曼滤波,得到车辆在行驶过程中路面附着系数。
14、进一步地,还包括;
15、将所述车辆在行驶过程中路面附着系数代入预设道路附着系数的增益函数中进行计算,得到增益处理后的力矩。
16、进一步地,确定车辆在行驶过程中路面附着系数、助力力矩、车辆特性补偿值以及电机特性补偿值,包括;
17、所述车辆特性补偿值包括阻尼控制扭矩、主动回正扭矩以及回正速度扭矩;
18、根据所述转向扭矩、所述电机转速以及所述转向盘角度,确定方向盘转角与方向盘转速;
19、将所述方向盘转角与所述方向盘转速代入至预设的阻尼控制扭矩模型,计算得到阻尼控制扭矩;
20、对所述方向盘转角与所述车辆运行车速信息进行计算,得到主动回正补偿扭矩,将所述主动回正补偿扭矩进行限幅以及增益处理,得到主动回正扭矩;
21、通过转向角与方向盘转向角度对车辆转向的状态进行判定,即方向盘为转出或回正,再通过转向速度与方向盘转向速度对车辆的转向速度进行判定,然后通过判定后的转向角与转向速度以及车速计算相应方向盘回正所需的方向盘角速度,以方向盘回正角速度作为目标,得到所需要的回正速度补偿扭矩,对所得到的回正速度补偿扭矩进行限幅与增益的调整,得到最终所需要的回正速度补偿扭矩。
22、进一步地,确定车辆在行驶过程中路面附着系数、助力力矩、车辆特性补偿值以及电机特性补偿值,还包括;
23、所述电机特性补偿包括电机损耗补偿以及电机惯性补偿;
24、将所述电机转速输入转矩补偿计算模型,得到相应的补偿转矩,对补偿扭矩进行限幅与增益的调整,得到所需要的电机损耗补偿扭矩;
25、对输入的电机转速进行低通滤波处理,采用的是1阶iir滤波器,对低通滤波后的电机速度信号进行近似微分计算出电机角加速度信号,将电机角加速度信号作为输入电机惯性补偿模型计算,相位补偿采用1阶iir数字滤波器,得到相应的转矩结果,然后将相应的转矩结果进行相位前移补偿,最后根据车速计算控制增益,乘以电机角加速度信号,并进行相应的限幅处理,得到最后的电机惯性补偿。
26、第二方面,本发明提供一种基于多信息感知融合的线控转向路感模拟装置,所述装置包括;
27、获取模块,用于获取车辆在行驶过程中的车辆部件运行信息,所述车辆部件运行参数包括车辆运行车速信息、齿条位移信息、转向盘信息、转向扭矩信息以及电机转速信息;
28、确定模块,用于根据所述车辆在行驶过程中的车辆部件运行信息,确定车辆在行驶过程中路面附着系数、助力力矩、车辆特性补偿值以及电机特性补偿值;
29、根据车辆在行驶过程中路面附着系数、车辆特性补偿值以及电机特性补偿值,确定车辆在行驶过程中路感模拟反馈力值。
30、第三方面,本发明提供一种车辆,所述车辆包括;
31、存储器,用于存储可执行程序代码;
32、处理器,用于从所述存储器中调用并运行所述可执行程序代码,使得所述车辆执行基于信息融合转向路感模拟计算方法。
33、本发明的有益效果如下:本发明提供的一种基于信息融合转向路感模拟计算方法、装置及车辆,与现有技术相比,本发明的有益效果在于:
34、本发明通过对传统电动助力转向系统控制策略进行分析,设计sbw系统的助力力矩公式,所得到的助力力矩更符合现代驾驶员的操纵习惯,帮助驾驶员在驾驶时获得更准确反馈值、更熟悉的“路感”。
35、本发明通过对齿条位移进行观测获取更为精确的主要反馈力矩。本发明设计阻尼控制扭矩补偿,避免车辆在高速行驶时方向盘“发飘”问题。本发明设计主动回正扭矩与回正速度扭矩,改善方向盘的回正性能,与高速行驶时中点附近的操舵性能。本发明减小了sbw系统电机的扭矩损耗补偿。本发明设计电机惯性补偿策略,减小了sbw系统助力电机减速机构的惯量响应,提高快速转向响应能力。
- 还没有人留言评论。精彩留言会获得点赞!