一种基于线驱动的人形机器人腿部结构及机器人
本发明涉及人形机器人,具体涉及一种基于线驱动的人形机器人腿部结构及机器人。
背景技术:
1、如今,人形机器人技术已经取得了长足发展,但是离实际应用还有很长的距离。究其原因,与其独特的结构构造和双足运动特性具有密切联系。目前,人形机器人腿部结构大多采用旋转电机直驱的方式,导致腿部结构仿生度不高、惯量高。
2、为了提高人形机器人的行走的稳定性、灵活性,一般采用将机器人腿部结构中的驱动器位置提高,从而提高机器人质心高度,降低机器人腿部机构的转动惯量。
技术实现思路
1、为了解决目前人形机器人腿部结构高惯量、整体仿生程度不高的问题,本发明提供一种基于线驱动的人形机器人腿部结构及机器人。
2、本发明解决其技术问题所采用的技术方案如下:
3、一种基于线驱动的人形机器人腿部结构及机器人,包括髋关节、膝关节和踝关节,其中髋关节三自由度、膝关节一自由度和踝关节两自由度,腿部结构的所有伺服电机均分布在大腿上,膝关节采用线驱动,从而更好的模拟肌肉的收缩和舒张,提高仿生度;踝关节采用四连杆传动和带传动,将伺服电机的动力从大腿传递到踝关节,从而降低惯量。
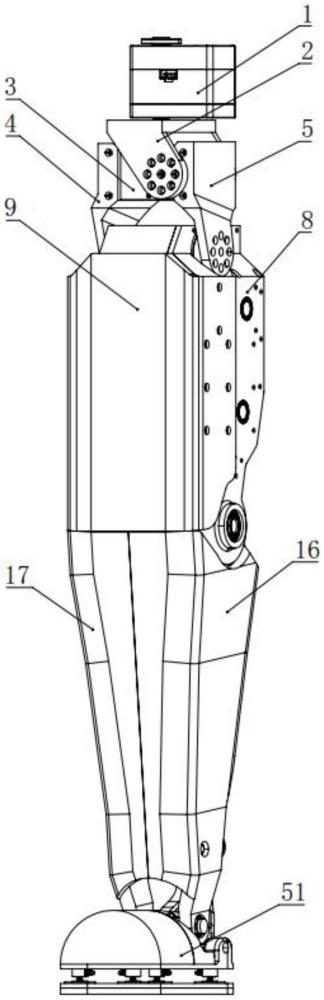
4、进一步的,所述的髋关节结构包括第一伺服电机(1)、上固定架(2)、第二伺服电机(3)、左固定架(4)、右固定架(5)、第三伺服电机(6)、大腿左固定架(8)、大腿右固定架(7)、前固定架(9);所述髋关节从上往下依次为第一伺服电机(1)、第二伺服电机(3)、第三伺服电机(6);所述第一伺服电机(1)的输出轴与上固定架(2)的顶部连接,上固定架(2)的两侧与第二面伺服电机(3)的输出轴连接;第二伺服电机(3)的两侧分别与左固定架(4)、右固定架(5)的上端固定连接,左固定架(4)、右固定架(5)的下端与第三伺服电机(6)的输出轴连接;第三伺服电机(6)与大腿左固定架(8)、大腿右固定架(7)的上端固定连接;所述前固定架(9)的两侧与大腿左固定架(8)、大腿右固定架(7)固定连接;第一伺服电机(1)旋转带动上固定架(2)及以下的腿部结构在水平面运动;由于第二伺服电机(3)的输出轴与上固定架(2)连接,因此第二伺服电机(3)旋转时,上固定架(2)不动,第二伺服电机(3)及以下的腿部结构在冠状面运动;同理,第三伺服电机(6)旋转带动第三伺服电机(6)及以下的腿部结构在矢状面运动。
5、进一步的,所述膝关节结构包括膝关节伺服电机(10)、绕线盘(11)、惰轮(12)、第一定轮(13)、第二定轮(14)、第三定轮(43)、第四定轮(44)、第一钢丝绳(15)、第二钢丝绳(45)、小腿左固定架(16)、小腿右固定架(17)、第一定轮固定件(18)、踝关节左伺服电机(19)、左输出轴(20)、左输入轮(21)、左输出轮(22)、左同步带(23)、左张紧轮固定件(24)、左张紧轮(25)、左输出转盘(26)、左心轴固定盘(27)、踝关节右伺服电机(28)、右输出轴(29)、右输入轮(30)、右输出轮(31)、右同步带(32)、右张紧轮固定件(33)、右张紧轮(34)、右输出转盘(35)、右心轴固定盘(36)、中心轴(37)、第一套筒(38)、第二套筒(39)、左第一套筒(40)、左第二套筒(41)、第二定轮固定件(42);所述大腿左固定架(8)、大腿右固定架(7)上开有四组伺服电机固定孔,每组伺服电机固定孔有六个,与每个伺服电机上的固定孔一一对应;所述膝关节伺服电机(10)紧贴第三伺服电机(6),通过伺服电机固定孔固定在大腿左固定架(8)、大腿右固定架(7)上;所述踝关节左伺服电机(19)与踝关节右伺服电机(28)并列纵向分布于大腿左固定架(8)、大腿右固定架(7)中间,并通过伺服电机固定孔固定在大腿左固定架(8)、大腿右固定架(7)上;所述踝关节左伺服电机(19)靠近膝关节伺服电机(10)输出轴的正下方。
6、进一步的,所述绕线盘(11)的一端与膝关节伺服电机(10)的输出轴连接,绕线盘(11)的另一端与大腿左固定架(8)通过轴承连接;所述绕线盘(11)的侧面开有两个小孔,用于固定第一钢丝绳(15)和第二钢丝绳(45);所述第一定轮固定件(18)与大腿左固定件(7)连接,第一定轮(13)与第三定轮(43)设置在第一定轮固定件(18)对应的轮槽内,且第一定轮(13)与第三定轮(43)的一端通过螺栓与第一定轮固定件(18)的一端相连接,另一端通过螺栓与大腿左固定件(7)相连接;所述第二定轮固定件(42)与小腿左固定架(16)连接,所述第二定轮和第四定轮(44)与小腿左固定架(16)、第二定轮固定架(42)的连接方式与第一定轮(13)、第三定轮(43)相同。
7、进一步的,所述左输出轴(20)与踝关节左伺服电机(19)的输出轴连接;所述左输出轴(20)的实心轴部分从左到右依次设置第二套筒(39)、惰轮(12)、第一套筒(38)、左输入轮(21);所述左输入轮(21)通过左输出轴(20)实心轴上的键与左输出轴(20)连接;所述惰轮(12)通过轴承与左输出轴(20)连接,第一套筒(38)、第二套筒(39)为惰轮(12)中的轴承起到轴向固定作用;左输出轴(20)左端通过轴承与大腿左固定架(8)连接;
8、所述右输出轴(29)一端与踝关节右伺服电机(28)的输出轴相连接,另一端通过轴承与大腿右固定架(7)连接;所述右输入轮(30)通过右输出轴(29)实心轴上的键与右输出轴(29)连接。
9、进一步的,所述小腿左固定架(16)上端有一段实心轴,通过轴承与大腿左固定架(8)连接;所述左心轴固定盘(27)与小腿左固定架(16)的上端右侧固定连接;所述小腿右固定架(17)与大腿右固定架(7)、右心轴固定盘(36)的连接方式和小腿左固定架(16)相同。
10、进一步的,所述第一钢丝绳(15)一端固定在绕线盘(11)侧方的小孔中;所述第一钢丝绳(15)从绕线盘引出后,从上到下,依次先绕过惰轮(12)的内侧,再穿过第一定轮固定架(18)的穿线槽,绕过第一定轮(13),再穿进小腿左固定架(16)的环形线槽中,绕第二定轮(14)一周,再次穿回小腿左固定架(16)的环形线槽,再次绕过第一定轮(13),最终,固定在大腿左固定架(8)上;第二钢丝绳(45)在膝关节的绕线方式与第一钢丝绳(15)相同,此处不在赘述;所述第一定轮(13)和第三定轮(43)为定滑轮,所述第二定轮(14)和第四定轮(44)为动滑轮;当膝关节伺服电机(10)顺时针旋转时,第二定轮(14)绕膝关节向第一定轮(13)靠拢,第四定轮绕膝关节远离第三定轮,从而带动膝关节以下,与小腿左固定架(16)相连接的腿部结构在矢状面运动。
11、进一步的,所述右张紧轮固定件(33)与大腿右固定架(7)固定连接;所述右张紧轮(34)设置在右张紧轮固定件(33)的对应轮槽内,通过螺栓与右张紧轮固定件(33)连接;所述左张紧轮固定件(24)与第一定轮固定件(18)相连接;所述左张紧轮(25)与第一定轮固定架(18)的轮槽同轴心,且与第一定轮(13)相贴,通过螺栓与左张紧轮固定件(24)连接;所述右张紧轮(34)、左张紧轮(25)均设置在靠近输出轮,传动带的外侧。
12、进一步的,所述中心轴(37)所在位置为膝关节的轴心,从左往右到中心轴(37)中间依次设置左心轴固定盘(27)、左第一套筒(40)、左输出轮(22)、左输出转盘(26)、左第二套筒,此为左半部分;中心轴(37)右半部分组件与左半部分对称分布。
13、进一步的,所述踝关节包括第一连杆(46)、第二连杆(47)、第三连杆(48)、第四连杆(49)、十字轴(50)、底板(51)、t轴(52)、第一支架(53)、第二支架(54)、t轴支架(55);所述十字轴(50)为踝关节轴,左右两端通过轴承与小腿左固定架(16)、小腿右固定架(17)的下端连接,前后两端通过轴承与第一支架(53)、第二支架(54)连接;所述第一支架(53)、第二支架(54)与底板(51)固定连接;所述踝关节右伺服电机(28)旋转时,带动右输入轮(30)转动,通过右同步带(32)将动力传递到右输出轮(31);同理,所述踝关节左伺服电机(19)通过左同步带(23)将动力传递到左输出转盘(26)上;此为踝关节动力的第一级传动;所述第一连杆(46)上端通过轴承与左输出转盘(26)连接,下端通过轴承与第三连杆连接;所述第二连杆(47)一端通过轴承与大腿左固定架(16)连接,作为第一ruu机构的转动副r,另一端通过轴承与第三连杆(48)连接;所述第三连杆(48)通过轴承与第四连杆(49)的上端连接,所述第三连杆(48)作为第一ruu机构的虎克铰u;所述第四连杆(49)的下端通过轴承与t轴(52)的一端连接;所述t轴(52)的另外两端通过轴承与底板(51)、t轴支架(5)5连接,所述t轴(52)作为第一ruu机构的虎克铰u;在踝关节的另一侧存在另一组平行的第二ruu机构,该第二ruu机构与第一ruu机构相同;上述两组ruu机构与十字轴共同组成2ruu-u机构,作为踝关节动力的第二级传动,实现踝关节的矢状面和冠状面的运动。
14、本发明与现有技术相比产生的有益效果是:
15、1.采用多种混合传动机构设计,尤其体现为线驱动与刚性驱动相结合的刚柔并济的传动结构,降低了腿部结构的惯量,提高了动态响应能力。
16、2.采用分段结构设计,对不同分段采用不同材料,进一步实现保证刚性以及轻量化的双重要求。
- 还没有人留言评论。精彩留言会获得点赞!