一种控制车辆转向的方法、装置、车辆和存储介质与流程
本技术涉及车辆转向领域,并且更具体地,涉及车辆转向领域中一种控制车辆转向的方法、装置、车辆和存储介质。
背景技术:
1、随着车辆转向技术的不断发展,后轮转向技术也逐渐被广泛地应用在车辆中。后轮转向技术,也称为全轮转向技术,它允许车辆的后轮在特定条件下也能够根据行驶需求主动地转动一定角度,而不仅仅是跟随前轮被动转向。
2、目前常见的后轮转向技术的应用场景包括两种,分别为低速行驶和高速行驶。车辆在低速行驶时,后轮与前轮的转动方向相反;车辆在高速行驶时,后轮与前轮的转动方向相同。
3、相关技术中,当车辆在任何行驶状态下,后轮所能转动的角度范围都一致。当车辆失稳时,上述后轮转向方式可能会导致车辆发生危险。
技术实现思路
1、本技术提供了一种控制车辆转向的方法、装置、车辆和存储介质,该方法能够在车辆出现失稳时,根据车辆的失稳风险系数,对车辆后轮所能转动的角度进行限制,从而能够保证车辆的稳定性和可操控性。
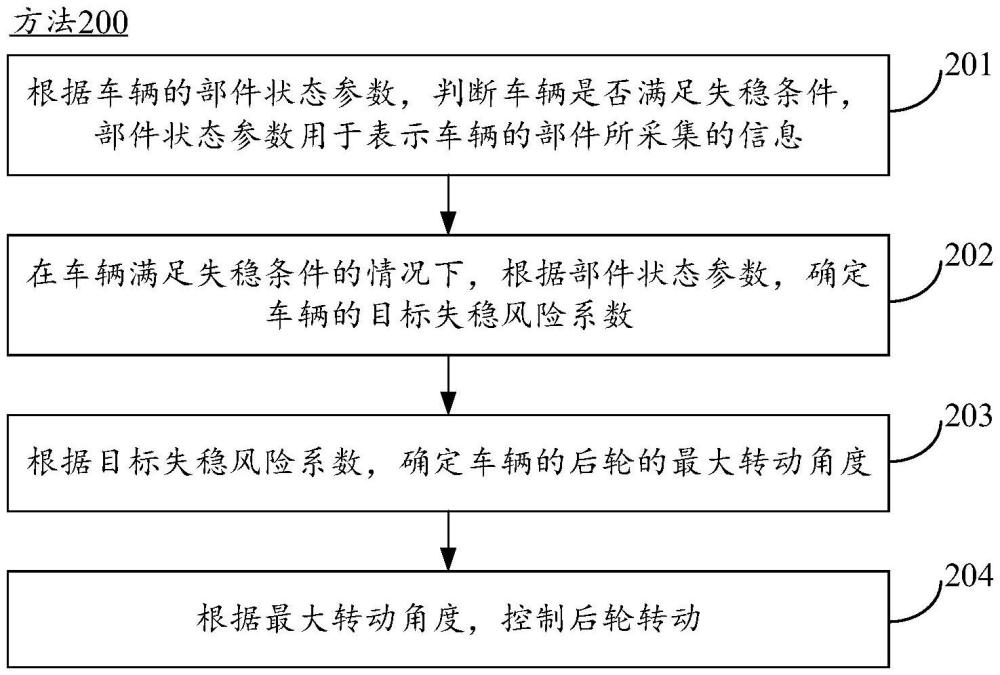
2、第一方面,提供了一种控制车辆转向的方法,该方法包括:根据车辆的部件状态参数,判断该车辆是否满足失稳条件,该部件状态参数用于表示该车辆的部件所采集的信息;在该车辆满足该失稳条件的情况下,根据该部件状态参数,确定该车辆的目标失稳风险系数;根据该目标失稳风险系数,确定该车辆的后轮的最大转动角度;根据该最大转动角度,控制该后轮转动。
3、上述技术方案中,对于配置有后轮转向系统的车辆,为了保证车辆后轮转向时车辆的安全,本技术提出了一种控制车辆转向的方法。具体在车辆运行过程中,根据车辆的部件状态参数,判断车辆是否处于失稳状态。在车辆处于失稳状态时,通过确定车辆的目标失稳风险系数,能够精确衡量车辆的失稳风险程度。再通过目标失稳风险系数,确定车辆后轮的最大转动角度,上述过程能够保证车辆后轮转动的角度可以随着车辆的不稳定性对应调整。具体的,本技术通过车辆的失稳程度,对车辆后轮的转动角度进行限制,使后轮只能在给定的区域而非全角度范围转动,能够缩小车辆在失稳状态下的转动幅度,帮助车辆更快地恢复行驶轨迹,提高车辆的稳定性和可操控性,减少车辆在失稳状态下的摆动幅度,保证了驾驶员和车内的安全。
4、结合第一方面,在某些可能的实现方式中,该根据该部件状态参数,确定该车辆的目标失稳风险系数,包括:根据该部件状态参数,确定该车辆的预测失稳风险系数和失稳变化趋势,该失稳变化趋势用于表示该车辆的失稳状态会加剧还是会减弱;根据该失稳变化趋势和该部件状态参数,确定该预测失稳风险系数的权重;根据该预测失稳风险系数和该权重,确定该目标失稳风险系数。
5、上述技术方案中,在确定车辆的目标失稳风险系数时,首先可以根据部件状态参数,初步确定车辆的失稳风险系数。在此基础上,进一步通过部件状态参数,确定车辆的失稳状态是会加重还是会削弱,以此来确定对车辆后轮的干预强度,能够使得后轮转向角度的调整和车辆实际的状态紧密相关,保证了转向角度确定的精确性。
6、结合第一方面和上述实现方式,在某些可能的实现方式中,该部件状态参数包括车速、轮速、方向盘转角、油门踏板开度、制动踏板开度、横向加速度、纵向加速度和横摆角速度,该根据该部件状态参数,确定该车辆的预测失稳风险系数,包括:根据当前时刻的车速和轮速,确定该当前时刻的滑移率;根据该当前时刻的滑移率,确定该车辆所处道路的路面附着系数范围;根据该路面附着系数范围、该当前时刻的车速、方向盘转角、油门踏板开度、制动踏板开度、横向加速度、纵向加速度和横摆角速度,确定该预测失稳风险系数。
7、结合第一方面和上述实现方式,在某些可能的实现方式中,该根据该路面附着系数范围、该当前时刻的车速、方向盘转角、油门踏板开度、制动踏板开度、横向加速度、纵向加速度和横摆角速度,确定该预测失稳风险系数,包括:根据该路面附着系数范围,确定第一失稳风险系数;根据该当前时刻的方向盘转角,确定第二失稳风险系数;根据该当前时刻的油门踏板开度,确定第三失稳风险系数;根据该当前时刻的制动踏板开度,确定第四失稳风险系数;根据该当前时刻的横向加速度,确定第五失稳风险系数;根据该当前时刻的纵向加速度,确定第六失稳风险系数;根据该当前时刻的横摆角速度,确定第七失稳风险系数;根据该当前时刻的车速,确定第八失稳风险系数;对该第一失稳风险系数、该第二失稳风险系数、该第三失稳风险系数、该第四失稳风险系数、该第五失稳风险系数、该第六失稳风险系数、该第七失稳风险系数和该第八失稳风险系数求平均值,得到该预测失稳风险系数。
8、结合第一方面和上述实现方式,在某些可能的实现方式中,该根据该部件状态参数,确定该车辆的失稳变化趋势,包括:在该当前时刻的下一时刻的油门踏板开度大于该当前时刻的油门踏板开度,或者,该下一时刻的制动踏板开度大于该当前时刻的制动踏板开度,或者,该下一时刻的方向盘转角大于该当前时刻的方向盘转角的情况下,确定该失稳变化趋势为增加;在该下一时刻的油门踏板开度小于或等于该当前时刻的油门踏板开度,且该下一时刻的制动踏板开度小于或等于该当前时刻的制动踏板开度,且该下一时刻的方向盘转角小于或等于该当前时刻的方向盘转角的情况下,确定该失稳变化趋势为减小。
9、结合第一方面和上述实现方式,在某些可能的实现方式中,该根据该失稳变化趋势和该部件状态参数,确定该预测失稳风险系数对应的权重,包括:在该失稳变化趋势为增加的情况下,根据该下一时刻的油门踏板开度和该当前时刻的油门踏板开度的差值,或者,该下一时刻的制动踏板开度和该当前时刻的制动踏板开度的差值,或者,该下一时刻的方向盘转角和该当前时刻的方向盘转角的差值,确定该权重;在该失稳变化趋势为减小的情况下,根据该下一时刻的油门踏板开度和该当前时刻的油门踏板开度的差值、该下一时刻的制动踏板开度和该当前时刻的制动踏板开度的差值,以及该下一时刻的方向盘转角和该当前时刻的方向盘转角的差值,确定该权重。
10、结合第一方面和上述实现方式,在某些可能的实现方式中,该根据该目标失稳风险系数,确定该车辆的后轮的最大转动角度,包括:在该目标失稳风险系数处于第一预设范围的情况下,确定该最大转动角度为第一预设转动角度;在该目标失稳风险系数处于第二预设范围的情况下,确定该最大转动角度为第二预设转动角度,该第一预设范围的最大系数小于该第二预设范围的最小系数,该第一预设转动角度大于该第二预设转动角度;在该目标失稳风险系数处于第三预设范围的情况下,确定该最大转动角度为第三预设转动角度,该第二预设范围的最大系数小于该第三预设范围的最小系数,该第二预设转动角度大于该第三预设转动角度;在该目标失稳风险系数处于第四预设范围的情况下,确定该最大转动角度为第四预设转动角度,该第三预设范围的最大系数小于该第四预设范围的最小系数,该第三预设转动角度大于该第四预设转动角度。
11、上述技术方案中,在确定车辆后轮的最大转动角度时,本技术中设置了多个预设转动角度和对应的系数范围。在确定出目标失稳风险系数后,车辆可以确定当前的目标失稳风险系数所处的系数范围,并根据系数范围确定出对应的角度作为最大转动角度。由上可以看出,当失稳风险系数系数越大,对应的最大转动角度越小,上述过程能够考虑到失稳风险的梯度变化,对转动角度进行分级控制,从而确定出更加准确的转动角度,有助于提高车辆的操控灵活性。
12、结合第一方面和上述实现方式,在某些可能的实现方式中,该部件状态参数包括车速、轮速、横向加速度、纵向加速度和横摆角速度,该根据车辆的部件状态参数,判断该车辆是否满足失稳条件,包括:对于多个时刻中的任一时刻,获取该时刻的车速和轮速,该多个时刻包括当前时刻和该当前时刻之前的至少一个历史时刻;根据该时刻的车速和轮速,确定该时刻的滑移率;在该时刻的滑移率大于预设滑移率的情况下,根据该当前时刻的滑移率,确定该车辆所处道路的路面附着系数范围;根据该路面附着系数范围,确定预设横向加速度、预设纵向加速度和预设横摆角速度;在该当前时刻的横向加速度大于该预设横向加速度,或者,该当前时刻的纵向加速度大于该预设纵向加速度,或者,该当前时刻的横摆角速度大于该预设横摆角速度的情况下,确定该车辆满足该失稳条件;在该当前时刻的横向加速度小于或等于该预设横向加速度,且该当前时刻的纵向加速度小于或等于该预设纵向加速度,且该当前时刻的横摆角速度小于或等于该预设横摆角速度的情况下,确定该车辆不满足该失稳条件。
13、第二方面,提供了一种控制车辆转向的装置,该装置包括:条件判断模块,用于根据车辆的部件状态参数,判断该车辆是否满足失稳条件,该部件状态参数用于表示该车辆的部件所采集的信息;系数确定模块,用于在该车辆满足该失稳条件的情况下,根据该部件状态参数,确定该车辆的目标失稳风险系数;角度确定模块,用于根据该目标失稳风险系数,确定该车辆的后轮的最大转动角度;转动模块,用于根据该最大转动角度,控制该后轮转动。
14、结合第二方面和上述实现方式,在某些可能的实现方式中,该系数确定模块具体用于:根据该部件状态参数,确定该车辆的预测失稳风险系数和失稳变化趋势,该失稳变化趋势用于表示该车辆的失稳状态会加剧还是会减弱;根据该失稳变化趋势和该部件状态参数,确定该预测失稳风险系数的权重;根据该预测失稳风险系数和该权重,确定该目标失稳风险系数。
15、结合第二方面和上述实现方式,在某些可能的实现方式中,该部件状态参数包括车速、轮速、方向盘转角、油门踏板开度、制动踏板开度、横向加速度、纵向加速度和横摆角速度,该系数确定模块还用于:根据当前时刻的车速和轮速,确定该当前时刻的滑移率;根据该当前时刻的滑移率,确定该车辆所处道路的路面附着系数范围;根据该路面附着系数范围、该当前时刻的车速、方向盘转角、油门踏板开度、制动踏板开度、横向加速度、纵向加速度和横摆角速度,确定该预测失稳风险系数。
16、结合第二方面和上述实现方式,在某些可能的实现方式中,该系数确定模块还用于:根据该路面附着系数范围,确定第一失稳风险系数;根据该当前时刻的方向盘转角,确定第二失稳风险系数;根据该当前时刻的油门踏板开度,确定第三失稳风险系数;根据该当前时刻的制动踏板开度,确定第四失稳风险系数;根据该当前时刻的横向加速度,确定第五失稳风险系数;根据该当前时刻的纵向加速度,确定第六失稳风险系数;根据该当前时刻的横摆角速度,确定第七失稳风险系数;根据该当前时刻的车速,确定第八失稳风险系数;对该第一失稳风险系数、该第二失稳风险系数、该第三失稳风险系数、该第四失稳风险系数、该第五失稳风险系数、该第六失稳风险系数、该失稳第七风险系数和该第八失稳风险系数求平均值,得到该预测失稳风险系数。
17、结合第二方面和上述实现方式,在某些可能的实现方式中,该系数确定模块还用于:在该当前时刻的下一时刻的油门踏板开度大于该当前时刻的油门踏板开度,或者,该下一时刻的制动踏板开度大于该当前时刻的制动踏板开度,或者,该下一时刻的方向盘转角大于该当前时刻的方向盘转角的情况下,确定该失稳变化趋势为增加;在该下一时刻的油门踏板开度小于或等于该当前时刻的油门踏板开度,且该下一时刻的制动踏板开度小于或等于该当前时刻的制动踏板开度,且该下一时刻的方向盘转角小于或等于该当前时刻的方向盘转角的情况下,确定该失稳变化趋势为减小。
18、结合第二方面和上述实现方式,在某些可能的实现方式中,该系数确定模块还用于:在该失稳变化趋势为增加的情况下,根据该下一时刻的油门踏板开度和该当前时刻的油门踏板开度的差值,或者,该下一时刻的制动踏板开度和该当前时刻的制动踏板开度的差值,或者,该下一时刻的方向盘转角和该当前时刻的方向盘转角的差值,确定该权重;在该失稳变化趋势为减小的情况下,根据该下一时刻的油门踏板开度和该当前时刻的油门踏板开度的差值、该下一时刻的制动踏板开度和该当前时刻的制动踏板开度的差值,以及该下一时刻的方向盘转角和该当前时刻的方向盘转角的差值,确定该权重。
19、结合第二方面和上述实现方式,在某些可能的实现方式中,该角度确定模块具体用于:在该目标失稳风险系数处于第一预设范围的情况下,确定该最大转动角度为第一预设转动角度;在该目标失稳风险系数处于第二预设范围的情况下,确定该最大转动角度为第二预设转动角度,该第一预设范围的最大系数小于该第二预设范围的最小系数,该第一预设转动角度大于该第二预设转动角度;在该目标失稳风险系数处于第三预设范围的情况下,确定该最大转动角度为第三预设转动角度,该第二预设范围的最大系数小于该第三预设范围的最小系数,该第二预设转动角度大于该第三预设转动角度;在该目标失稳风险系数处于第四预设范围的情况下,确定该最大转动角度为第四预设转动角度,该第三预设范围的最大系数小于该第四预设范围的最小系数,该第三预设转动角度大于该第四预设转动角度。
20、结合第二方面和上述实现方式,在某些可能的实现方式中,该部件状态参数包括车速、轮速、横向加速度、纵向加速度和横摆角速度,该条件判断模块具体用于:对于多个时刻中的任一时刻,获取该时刻的车速和轮速,该多个时刻包括当前时刻和该当前时刻之前的至少一个历史时刻;根据该时刻的车速和轮速,确定该时刻的滑移率;在该时刻的滑移率大于预设滑移率的情况下,根据该当前时刻的滑移率,确定该车辆所处道路的路面附着系数范围;根据该路面附着系数范围,确定预设横向加速度、预设纵向加速度和预设横摆角速度;在该当前时刻的横向加速度大于该预设横向加速度,或者,该当前时刻的纵向加速度大于该预设纵向加速度,或者,该当前时刻的横摆角速度大于该预设横摆角速度的情况下,确定该车辆满足该失稳条件;在该当前时刻的横向加速度小于或等于该预设横向加速度,且该当前时刻的纵向加速度小于或等于该预设纵向加速度,且该当前时刻的横摆角速度小于或等于该预设横摆角速度的情况下,确定该车辆不满足该失稳条件。
21、第三方面,提供了一种车辆,包括存储器和处理器。该存储器用于存储可执行程序代码,该处理器用于从存储器中调用并运行该可执行程序代码,使得该车辆执行上述第一方面或第一方面任意一种可能的实现方式中的方法。
22、第四方面,提供了一种计算机程序产品,该计算机程序产品包括:计算机程序代码,当该计算机程序代码在计算机上运行时,使得该计算机执行上述第一方面或第一方面任意一种可能的实现方式中的方法。
23、第五方面,提供了一种计算机可读存储介质,该计算机可读存储介质存储有计算机程序代码,当该计算机程序代码在计算机上运行时,使得该计算机执行上述第一方面或第一方面任意一种可能的实现方式中的方法。
- 还没有人留言评论。精彩留言会获得点赞!