一种轮式移动机器人的转向底盘及其控制方法
本发明涉及移动底盘,尤其涉及一种轮式移动机器人的转向底盘及其控制方法。
背景技术:
1、随着新能源汽车的发展,从乘坐内部空间更大、更舒适和搭载更长续航电池角度出发,车辆的轴距愈长转向困难的问题愈发显著,越来越多的发明人提出更加复杂的转向结构以实现减小车辆转弯半径,以提高车辆稳定性和灵活性,四轮转向结构就是其中一种典型结构。
2、鉴于汽车领域与轮式移动机器人领域的高度相似性,轮式移动机器人也确实存在更高负载能力和更长续航能力的现实需求,长轴距的轮式移动机器人成为一种常态选择。然而,分布式驱动的轮式移动机器人往往采用的滑移转向具有高速稳定性差、轮胎磨损大、铺装路面适应性差等缺点,从轮式移动机器人模态柔性发展趋势角度出发,将汽车领域的四轮转向引入到轮式移动机器人滑移转向中具有重要的意义。
技术实现思路
1、解决的技术问题:针对现有技术中移动底盘在转向过程中存在的技术问题,本发明提供一种轮式移动机器人的转向底盘及其控制方法,提高转向底盘的机动灵活性、安全稳定性以及多种地形适应性。
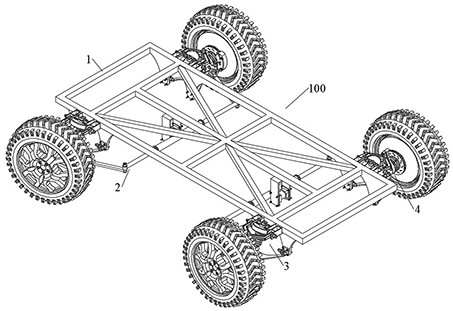
2、技术方案:本发明所述的一种轮式移动机器人的转向底盘,转向底盘包括:
3、移动车架,所述移动车架底部沿着中轴线前后端对应设置有转向电机架;
4、转向机构,所述转向机构包括对应安装在转向电机架上的两组;
5、悬架机构,所述悬架机构包括分别设置在移动车架两侧前后端的四组,每一所述转向机构两端分别与对应的悬架机构传动连接;
6、驱动机构,所述驱动机构包括对应连接在悬架机构的四组;
7、控制系统,所述控制系统包括车辆整车控制器以及与车辆整车控制器通讯连接的车速传感器和视觉传感器,所述车辆整车控制器接受车速传感器和视觉传感器传输的监测信号并控制转向机构和驱动机构协同转向动作。
8、优选地,所述移动车架包括前端梁、左边梁、右边梁和后端梁组成的支撑框架,且支撑框架内与前端梁、后端梁对应平行设置有前轴梁、后轴梁;
9、所述前轴梁、后轴梁与左边梁、右边梁之间设置有中间十字梁,且中间十字梁的对角线设置有分别与前轴梁、后轴梁与左边梁、右边梁连接的辅助梁;
10、所述支撑框架两侧分别位于前轴梁、后轴梁两端对应设置有悬架安装板。
11、优选地,所述转向机构包括集成ecu功能的转向电机,所述转向电机对应安装在转向电机架上;
12、所述转向电机前侧与转向套筒传动连接,且转向套筒内沿着其轴向传动连接有转向横拉杆,所述转向横拉杆两端分别铰接有转向球头拉杆,且转向球头拉杆远端与电磁离合器传动连接,所述电磁离合器与转向机构传动连接。
13、优选地,所述电磁离合器包括离合器壳体以及沿着其轴向自下而上设置的驱动部件、弹簧、衔铁和从动部件;
14、所述弹簧对应设置在驱动部件与衔铁之间,所述衔铁与从动部件连接;所述驱动部件可将转向球头拉杆传递的转向拉力传递给衔铁并带动从动部件做相应动作;
15、所述从动部件为一根螺纹轴,其上螺纹连接有一方螺母。
16、优选地,所述悬架机构为双横臂悬架,包括沿着移动车架边梁上下对应铰接的上摆臂和下摆臂;
17、所述上摆臂与下摆臂的远端之间连接有转向节,所述转向节与转向机构传动连接;所述上摆臂与下摆臂之间设置有减震器。
18、优选地,所述上摆臂和下摆臂均为u型结构;
19、所述减震器包括与移动车架的边梁固定连接的减震盘,所述减震盘两端分别设置有供上摆臂铰接的连接螺杆;所述减震盘底端设置有减震连杆,所述减震连杆底端与下摆臂的前端铰连接,且减震连杆上套装有减震弹簧。
20、优选地,所述驱动机构包括固定连接的轮毂轴承和连接支架,所述轮毂轴承与连接支架之间设置有盘式制动器,所述盘式制动器包括刹车盘以及设置在刹车盘外周的卡钳;
21、所述连接支架另一端通过螺栓与轮毂电机内侧固定连接,且轮毂电机的输出轴与轮毂电机外周的轮毂固定连接,所述轮毂的外周设置有轮胎。
22、本发明还公开了一种轮式移动机器人的转向底盘的转向控制方法,包括以下步骤:
23、步骤1:视觉传感器拍摄路况视频信息k并传输至车辆整车控制器,车辆整车控制器接受路况视频信息k并判断路况类型;若k=0判定为铺装路面,若k=1判定为越野路面;
24、步骤2:在完成路况k的判断后,再由车速传感器采集车速信息v,并将采集到的车速信息v传输给车辆整车控制器进行车速判断;若v≤v0判定为低速工况,若v>v0判定为高速工况;其中,v为转向底盘转向时的入弯速度,v0是滑移转向失稳临界速度;
25、步骤3:根据路况信息k和车速信息v,车辆整车控制器给出转向策略,并通过控制转向电机和电磁离合器协同配合实现规划转向操作。
26、优选地,(1)当车辆整车控制器判定转向底盘在铺装路面低速工况下行驶时:
27、①车辆整车控制器选择前轮转向策略,当车辆整车控制器输出指令为前轮转向策略,此时前轮的转向电机启动,前轮两侧的电磁离合器得电,电磁离合器的驱动部件与从动部件抱死用以传递转向电机输出的转向力矩;前轮的转向电机输出传递给转向横拉杆,使其可在转向套筒中做往复直线运动,进而可拉动转向球头拉杆运动产生转向拉力矩,由于电磁离合器抱死,故可将拉力矩经其传递到转向节上,使得转向节发生摆动,转向节的摆动经由轮毂轴承、盘式制动器、连接支架和轮毂电机传递到轮毂上,轮毂带动轮胎摆动完成前轮转向控制;在此过程中,后轮的转向电机不启动,后轮两侧的电磁离合器不得电,电磁离合器的驱动部件与从动部件在弹簧作用下分离;后轮两侧的轮毂电机得电并负责驱动,前轮两侧的轮毂电机不得电,可以节约能源;
28、②车辆整车控制器选择前轮后轮配合的四轮转向策略,同前轮转向策略相同,后轮转向策略采用相同的转向操作,也即后轮的转向电机同步启动和电磁离合器同步得电,转向底盘的两个前轮与两个后轮分别在前轮的转向电机和后轮的转向电机控制下,由转向横拉杆往不同横向方向直线移动,进而拉动前轮与后轮实现相反方向的转动,减小转弯转向半径;
29、(2)当车辆整车控制器判定转向底盘在湿滑状况的铺装路面低速工况下行驶时,车辆整车控制器选择滑移转向策略,此时前轮和后轮的对应的转向电机不启动,电磁离合器不得电,电磁离合器的驱动部件与从动部件处于分离状态;轮毂和轮胎在轮毂电机的速度控制下实现滑移转向;
30、(3)当车辆整车控制器判定转向底盘在铺装路面高速工况下行驶时,车辆整车控制器输出指令为四轮转向策略,此时前轮和后轮的对应的转向电机启动,四轮对应的电磁离合器得电,使得电磁离合器的驱动部件与从动部件抱死用以传递拉力矩;两个前轮与两个后轮分别在转向电机控制下,由转向横拉杆往同一横向方向直线移动,进而拉动转向球头拉杆转动,转向球头拉杆带动转向节转动,使前轮与后轮实现相同方向的转动,进而使得转向底盘完成大致平移的变道转向动作。
31、优选地,(1)当车辆整车控制器判定转向底盘在越野路面低速工况下行驶时,车辆整车控制器输出指令为滑移转向策略,滑移转向的具体过程与在湿滑铺装路面低速工况下滑移转向过程一致;
32、(2)当车辆整车控制器判定转向底盘在越野路面高速工况下行驶时,车辆整车控制器输出指令为四轮转向策略,四轮转向的具体过程与在铺装路面高速工况下四轮转向过程一致。
33、与现有技术相比,本发明至少具有如下有益效果:
34、1、本发明的转向底盘充分利用四轮转向与滑移转向的优势,既保留了采用滑移转向低速工况下转弯半径小和灵活性好的优点,又克服了滑移转向轮胎磨损大、多地形适应性差、高速稳定性和安全性差的缺点,引入四轮转向机制,进而提高轮式移动机器人的多地形适应能力、高速稳定性和安全性,保证分布式驱动轮式移动机器人在不同路况及不同速度工况下达到最优的转向性能;
35、2、分布式驱动的转向底盘采用滑移转向在高速行驶时转向稳定性较差,采用四轮转向在高速行驶和紧急避让等紧急条件下可以减少车辆的侧滑和摇摆,使得轮式移动机器人更佳安全和稳定,融合后的转向底盘可以提高其稳定性和安全性;
36、3、分布式驱动的轮式移动机器人采用的滑移转向因为不依赖车轮的精确控制,在潮湿泥泞地面更有优势,而在铺装路面轮胎磨损大,采用四轮转向可以有效减小轮胎磨损,融合后新的转向底盘可以提高轮式移动机器人的多地形适应性;
37、4、该转向底盘克服汽车中四轮转向装置纵轴固定方向布置的劣势,提供一种对称布置的前后都存在阿克曼转向梯形的四轮转向机构,通过电磁离合器控制转向节作用与否,结合滑移转向实现移动车架在纵向方向上的前后都能实现四轮转向,配合合适控制策略还可以实现前轮转向、后轮转向以及前后四轮同步/异步转向策略,使得转向方式更多样,更贴合轮式移动机器人运动场景。
- 还没有人留言评论。精彩留言会获得点赞!