一种上下楼梯承重面水平保持的机器人及其控制方法
本发明属于巡检机器人,尤其涉及一种上下楼梯承重面水平保持的机器人及其控制方法。
背景技术:
1、室内巡检机器人技术,作为机器人领域的重要分支,专精于在室内环境中的巡检、监控与安全防护,尤其擅长执行上下楼梯等复杂地形的巡检任务,确保全方位无死角的安全管理。
2、现有技术中,申请号为cn202211490008.1的中国发明专利公开了一种室内轮式巡检机器人,该机器人在平坦地面上能灵活转弯和稳定运行,但在多层建筑内无法完成跨楼层巡检任务。发明专利cn102477268a公开了一种欠驱动履带式移动越障平台,其履带机动性差,在地面移动时存在缺陷。cn111232081a公开了一种全方位水平姿态爬楼机器人,通过前进单元组与垂直运动单元组交替爬楼,但爬楼速度慢,越障能力低。cn109178137a公开了基于三自由度机械腿的多足机器人,爬楼时电机驱动机械腿逐级攀爬,控制复杂,速度较慢。cn109927808a公开了一种协同履带式四足机器狗,适应性弱,虽然结构简单,但爬楼速度慢。此外,申请号cn202110121084.4的中国发明专利可以实现爬楼梯,但在上楼时机器人主体呈倾斜角度,容易导致重心偏移。在承载货物或设备时,这种设计存在稳定性问题。
3、目前,对于移动爬楼机器人平台的理论研究和产品开发已经取得了很多成果,并且部分产品已经上市。然而,大多数现有的爬楼机器人存在承载能力差、爬楼速度慢等问题。四足式越障机器人虽然灵活,但控制复杂,不易普及。履带式机器人虽然稳定性好,但移动机动性差.。针对这一问题,本技术提出了一种新型的机器人设计。该机器人采用独特的轮履交替结构,显著增强了其灵活性,使其能够轻松上下楼梯,并保持承重面的水平稳定。同时,该机器人还能在楼层内平稳移动,从而有效地执行各种跨楼层任务。
技术实现思路
1、本发明的目的是为了解决目前爬楼机器人上下楼梯时主体倾斜重心偏移的问题,提出了一种上下楼梯承重面水平保持的机器人及其控制方法。
2、为了实现上述目的,第一方面,本发明提供了一种上下楼梯承重面水平保持的机器人,采用如下技术方案:
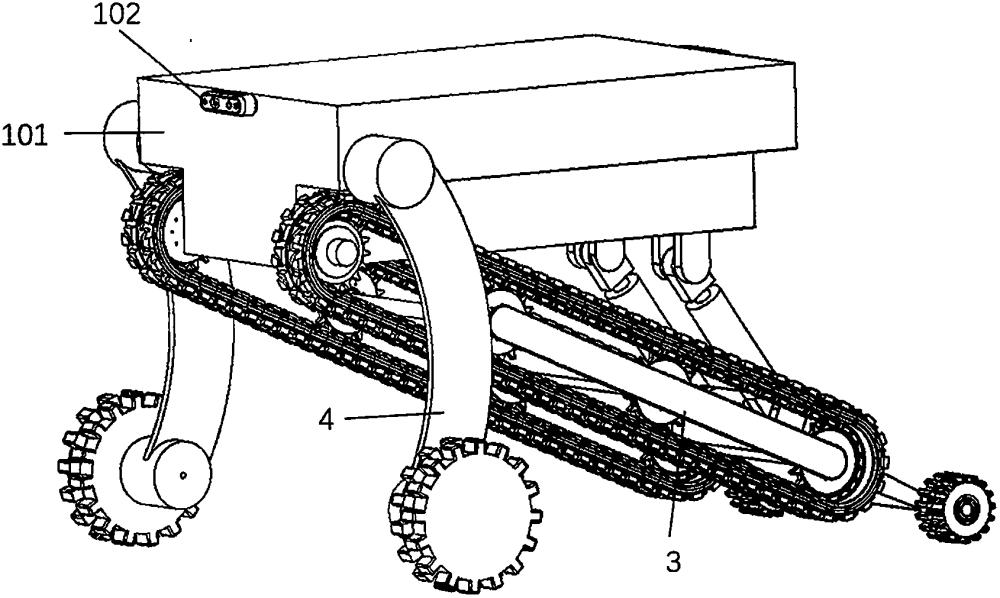
3、一种上下楼梯承重面水平保持的机器人,包括机器人外壳以及分别固定在机器人外壳前后端的前端深度相机和后端深度相机;
4、所述机器人外壳两侧各有两条机械腿,所述机械腿顶端有电机控制其旋转,底端安装有轮电机,并通过法兰与车轮相连;
5、所述机器人外壳下部有一个履带底盘,其后部装有后轮固定支架,该支架的两侧分别通过轴承安装有两个小型辅助轮,以便在平地走路时使用。此外,履带底盘通过铰链与伸缩杆相连,而伸缩杆也通过铰链与机器人外壳相接,在爬楼运动中可通过伸缩杆调整机器人承重面的角度,使其保持水平;
6、所述履带底盘采用对称设计,由两个驱动电机、两条履带和一个底板组成。每个驱动电机负责驱动一个主动轮。每条履带内设有三个承重轮,这些承重轮位于两侧,并通过各自的三条支撑轴与底板固定连接。此外,每个承重轮的外侧均固定有一个护板以提供保护;
7、进一步的,所述机器人的机械腿由电机直接驱动,机械腿底端的车轮由轮电机独立驱动,以控制其转动和调整机器人姿态;
8、进一步的,所述履带底盘的两条履带分别由一个驱动电机带动,所述驱动电机控制履带的转动速度和方向,使机器人能够平稳上下楼梯和跨越障碍;
9、进一步的,所述前端深度相机和后端深度相机分别固定于机器人外壳的前后端,能够检测环境信息和楼梯的数据。所述数据被本文提出的控制方法利用,使机器人能够自主规划路径,稳定上下楼梯跨越楼层,实现巡检任务;
10、进一步的,所述机器人的控制系统通过融合前端深度相机的数据和传感器信息,实现对机器人机械腿、履带底盘以及小型辅助轮的协调控制,确保机器人在不同环境下的稳定行走和楼层跨越。
11、该上下楼梯承重面水平保持的机器人结构紧凑,能够在复杂环境中灵活移动,适用于多种巡检场景,具备较高的自主性和适应性。
12、为了实现上述目的,第二方面,本发明还提供了一种上下楼梯承重面水平保持的机器人控制方法,采用如下技术方案:
13、一种上下楼梯承重面水平保持的机器人控制方法,采用了如第一方面中所述的一种上下楼梯承重面水平保持的机器人,首先机器人通过前端深度相机和后端深度相机采集图像数据,并记录当前帧的图像和深度信息;随后,系统扫描图像中的每个像素,检测是否存在深度信息缺失或模糊区域;若所有像素点均有有效深度值且图像清晰度符合预设标准,则停止采集;否则,等待下一帧图像,利用光流算法追踪像素点,将下一帧的深度信息映射至上一帧的空洞点以补充缺失信息,同时确保帧间时间间隔短以保持运动连续性;此过程重复进行,直至所有空洞点被填补且图像清晰度达标,最后通过滤波器处理去除噪声和异常值,平滑深度图,以获得精确稳定的深度信息;
14、进一步的,通过收集包含上行楼梯与下行楼梯的图像数据集,并对其进行标注;利用该数据集训练yolo v8网络,调整算法内置参数和网络架构,以提高识别精度;使用训练好的yolo v8网络模型,对前端深度相机获取的图像进行处理,识别出图像中的楼梯位置和类别。具体过程包括:在图像中识别楼梯的边缘点,通过前端深度相机的内外参数,将二维像素坐标转换为三维现实坐标,构建楼梯的三维模型;
15、进一步的,所述三维数据经过处理后,提取楼梯的关键点数据,使用canny边缘检测等算法识别出楼梯的边缘;通过霍夫变换算法识别出楼梯的每一级台阶边缘;统计霍夫变换识别出的平行线数量,即为楼梯的阶数;
16、进一步的,机器人利用楼梯信息执行爬楼梯运动,具体步骤包括:
17、步骤1:当机器人运动到楼梯正前方时,机械腿向后旋转,同时车轮旋转推动机器人向前运动,随着机械腿的旋转,履带底盘与楼梯面接触变为爬楼梯姿态,利用伸缩杆支撑机器人外壳保持水平,具体机械腿的旋转角度θ(t)随时间t的变化如下:
18、θ(t)=θ0+ω1t;
19、其中θ0为机械腿的初始角度,ω1为机械腿的旋转速度;
20、步骤2:当机械腿旋转至与履带底盘平行位置时,机械腿停止旋转,以避免腿部卡在楼梯上。此时,旋转角度θ满足:
21、θ=90°;
22、步骤3:履带在主动轮的驱动下开始旋转,推动机器人逐级爬上楼梯。履带的线速度v与旋转速度ω2之间的关系为:
23、v=r·ω2;
24、其中r为主动轮的半径;
25、步骤4:当机器人即将到达最后两级台阶时,机械腿再次开始旋转,逐步恢复至原始位置,同时调整伸缩杆的长度使机器人外壳保持水平,机械腿的旋转角度θ(t)变化为:
26、θ(t)=90°-ω1t
27、步骤5:机械腿恢复至原始位置后,履带停止旋转,使机器人恢复成平地巡检姿态。
28、进一步的,还包括一种上下楼梯承重面水平保持的机器人按照爬楼梯运动方法的逆流程以倒退的方式在楼梯上下降。在具体实施过程中,机器人采用逆向运动流程下楼。它使用后端深度相机来感知环境和楼梯信息,接着机械腿向前旋转,使得履带底盘与楼梯面接触。同时,通过调整伸缩杆的长度,保持机器人外壳水平。机器人以倒退的方式在楼梯上缓慢下降,确保顺畅地下楼,并最终恢复到平地巡检的姿态。
29、与现有技术相比,本发明的有益效果是:
30、1、本文创新性地提出了一种控制机器人在平地和楼梯上行走的双模式方法。在平地行走时,机器人依靠机械腿的车轮和后部的辅助轮移动;在遇到楼梯时,机械腿旋转至特定角度,切换为履带行走模式,并依靠伸缩杆调整机器人外壳使其在运动过程中始终保持水平。此方法使机器人能够更灵活地适应不同的地形,显著提高了巡检任务的效率和范围。
31、2、本文创新性地提出了一种在机器人上下楼梯过程中保持主体承重面水平的方法。通过精确控制履带和机械腿的运动,同时协同控制伸缩杆,确保机器人在整个爬楼梯过程中,主体部分始终保持水平状态。该方法提高了机器人在爬楼梯过程中的稳定性和安全性,防止因倾斜或翻倒导致的故障,保证了巡检任务的顺利进行。
32、3、本文创新性地提出了一种利用计算机视觉和深度学习方法识别楼梯的阶梯数和位置的方法。通过前端和后端深度相机获取图像和深度信息,结合深度学习算法,机器人能够准确识别楼梯的边缘和关键点,并计算出楼梯的实际坐标。该方法使机器人能够自主调整位置和姿态,精确地完成上下楼梯任务,显著提高了巡检机器人的自主性和工作效率。
- 还没有人留言评论。精彩留言会获得点赞!