一种磁吸附爬壁机器人
本发明属于爬壁机器人,具体涉及一种磁吸附爬壁机器人。
背景技术:
1、随着国家基础设施建设的推进,长距离、大直径的输水管道得到了广泛的应用。输水管道需要进行定期维护,尤其需要定期对管道焊缝进行检测,管道的检测工作主要依赖人工和管道机器人。目前,管道机器人多针对小直径管道研制,此类管道机器人可以进入工人无法进入的管道进行检测作业,而服务大型管道的机器人平台目前还比较少,数米直径的输水管道往往需要人工搭建脚手架进行检测,检测工作费时费力且存在较大安全隐患。
2、爬壁机器人作为特种机器人的分支,被广泛应用于风力发电机、船舶、建筑外墙、大型罐体等壁面的检测维护工作。由于大型水利管道的材质多为铁质,故可使用磁吸附爬壁机器人来对管道进行检测,考虑到磁吸附爬壁机器人的安全性和可靠性,磁吸附爬壁机器人多采用永磁吸附。目前,永磁吸附爬壁机器人主要通过以下三种方式实现对曲面的吸附和攀爬:一、采用分体式的前后车身,前后车身配有独立的动力,车身之间采用铰接来适应曲面,如专利申请号为cn202111247831.5的适应多种立体面的磁吸附爬壁机器人;二、履带或车轮与车身之间铰接,履带或车轮可以相对于车身铰接点转动,从而在车身正前行进方向轴向适应曲面,如专利申请号为201920214773.8的磁吸附管道机器人;三、安装多条履带,且每一条都可以独立驱动,使得机器人可以在曲面上自由移动,如专利申请号为cn201710582547.0的适应复杂壁面作业的非接触式磁吸附爬壁机器人。
3、永磁吸附爬壁机器人虽然可以通过上述三种方式进行曲面吸附和攀爬作业,但上述三种方式也存在各自的缺点:一、永磁吸附爬壁机器人若使用分体式车身则车身轴距较长,有转向不灵活、转弯半径大和自身体积过大等缺点;二、永磁吸附爬壁机器人的履带与车身之间铰接时,履带相对于车身铰接点转动可以使永磁吸附爬壁机器沿管道轴向前进,但当机器人沿管道侧壁前进时,履带并不能很好的适应曲面;三、永磁吸附爬壁机器人安装多条履带,多条履带相对于车身独立活动,永磁吸附爬壁机器人存在结构复杂和转向不够灵活的问题。同时,上述的爬壁机器人多采用在履带上镶嵌永磁体的方法来提供吸附力,这种吸附方式产生的吸附力大,但磁力利用效率底,同一时间内大部分永磁体无法发挥作用,限制了机器人的轻量化,且磁力大小无法调节。若永磁吸附爬壁机器人采用间隙吸附方式提供吸附力,虽然可以通过调节间隙来调整磁力,但永磁体难以适应曲面形状,在曲率较大的工作面工作时吸附力不足。
4、综上所述可知,现有技术中缺少一种能适应复杂工作面的可变磁力永磁吸附爬壁机器人。
技术实现思路
1、本发明的目的在于提供一种磁吸附爬壁机器人,其采用间隙吸附方式提供吸附力,磁力大小可调节,且永磁体可自适应工作面变化,使履带可以紧贴工作面运动。
2、为了至少解决上述问题,本发明提供了如下技术方案:
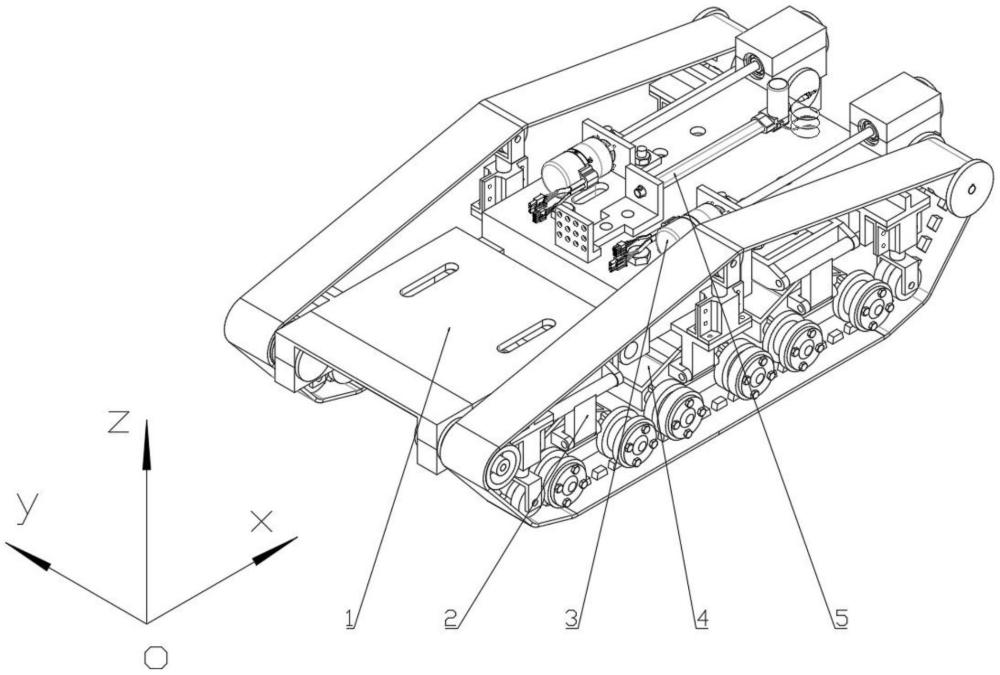
3、一种磁吸附爬壁机器人,包括:车架、吸附系统和动力系统,所述车架包括前车架和后车架,所述前车架和所述后车架通过车体销轴铰接,所述吸附系统安装在所述车架下方;所述车架和所述吸附系统之间设置有二维调节悬挂系统,所述二维调节悬挂系统辅助所述吸附系统相对所述车架在前后和左右两个维度摆动,使爬壁机器人贴合不同曲率的复杂工作面;所述吸附系统上设置有磁力调节系统,所述磁力调节系统根据爬壁机器人的工作状态调节所述吸附系统的磁力。
4、根据本发明的一个实施例,所述二维调节悬挂系统包括:活动悬挂和固定悬挂;所述活动悬挂有两套,分别安装在所述前车架前部和所述后车架后部,所述固定悬挂安装在所述车架的中部。
5、根据本发明的一个实施例,所述活动悬挂包括:悬挂上部,悬挂中部和悬挂下部;所述悬挂上部通过轴a与所述车架铰接,所述悬挂中部通过销轴与所述悬挂上部铰接,所述悬挂下部通过销轴与所述悬挂中部铰接,所述悬挂上部、悬挂中部和悬挂下部构成平行四边形连杆机构。
6、根据本发明的一个实施例,所述悬挂下部包括限位梁和轴b;所述车架中部沿磁吸附爬壁机器人前进方向设置有限位槽,所述限位梁卡在所述限位槽内,所述限位梁中部开有圆孔a,所述限位梁通过圆孔a套接在所述轴b中部。
7、根据本发明的一个实施例,所述固定悬挂包括悬挂架和轴c;所述悬挂架与所述后车架固定连接,所述轴c的两端固定连接在所述悬挂架上。
8、根据本发明的一个实施例,所述吸附系统包括磁铁框、吸附单元、负重轮a和负重轮b;使用销轴将所述吸附单元铰接在所述磁铁框内,通过绕销轴旋转所述吸附单元,改变所述吸附单元与工作面的夹角从而改变吸附力大小;
9、对于所述活动悬挂,所述轴b上套接有两个所述磁铁框,所述磁铁框可绕所述轴b转动,所述轴b上的两个所述磁铁框由所述限位梁隔开并保证定位,每个所述磁铁框上安装有两个所述负重轮a;
10、对于所述固定悬挂,所述轴c上套接有两个所述磁铁框,所述磁铁框可绕所述轴c转动,所述轴c上的两个所述磁铁框由轴套b隔开并保证定位,每个所述磁铁框上安装有两个所述负重轮b;
11、所述负重轮a与所述负重轮b中部都开有导向槽,所述负重轮a中部的导向槽宽于所述负重轮b中部的导向槽,所述负重轮a不参与对履带的导向作用,所述负重轮b参与对履带的导向作用。
12、根据本发明的一个实施例,所述动力系统有两套,分别设置在所述后车架左右两侧,所述动力系统包括前导轮、履带、电动机、传动轴、蜗轮蜗杆减速器、驱动轮和张紧装置;
13、所述电动机布置在所述后车架上部,所述传动轴两端分别通过联轴器连接所述电动机和所述涡轮蜗杆减速器,所述涡轮蜗杆减速器动力输出端连接所述驱动轮;所述驱动轮安装在所述前车架前部,所述电动机的动力传递至所述驱动轮后,由所述驱动轮带动所述履带运动;
14、所述前导轮安装所述在前车架前部靠上位置,所述导向轮a安装在所述前车架的前部靠下位置,所述导向轮b安装在所述后车架的后部,所述导向轮a和导向轮b对所述履带起到导向作用防止所述履带跑偏;
15、所述张紧装置安装在所述悬挂架左右两侧,所述张紧装置对所述履带起到张紧作用,保证所述前车架相对所述后车架活动时所述履带不会松脱。
16、根据本发明的一个实施例,所述张紧装置包括:外壳a、导轮架、导轮、弹簧和外壳b;所述导轮通过销轴连接在所述导轮架一端,所述弹簧安装在所述导轮架另一端,所述外壳a和所述外壳b包裹所述弹簧和所述导轮架连接所述弹簧的一端,所述外壳a和所述外壳b固定连接,所述弹簧提供张力使所述履带始终保持张紧状态;所述导向轮a和所述导向轮b与所述张紧装置结构相同。
17、根据本发明的一个实施例,所述磁力调节系统包括:柔性导管、提升钢丝、电动推杆座和电动推杆;所述提升钢丝穿过所述柔性导管,所述提升钢丝两端分别连接所述吸附单元和所述电动推杆,所述柔性导管两端分别连接所述磁铁框和所述电动推杆座,通过所述电动推杆带动所述所述吸附单元。
18、根据本发明的一个实施例,所述一种磁吸附爬壁机器人的使用方法包括如下步骤:
19、步骤a:由工作人员将该磁吸附爬壁机器人放入管道底部,此时所述磁力调节系统将所述吸附单元提升,所述吸附单元与工作面有一定的夹角,所述吸附单元对工作面吸附力最小,该爬壁机器人无法进行爬壁作业,此时控制该爬壁机器人沿管道底部快速移动至待检测部位,控制所述电动机驱动所述履带使该爬壁机器人前进,该爬壁机器人沿管道底部快速行进到检测位置,到达目的地后,所述磁力调节系统将所述吸附单元放下,此时所述吸附单元正对着工作面,吸附力达到最大,该爬壁机器人进入工作模式。
20、步骤b:该磁吸附爬壁机器人进入工作模式后,所述吸附单元正对工作面,吸附力大幅增强,该磁吸附爬壁机器人可以进行爬壁作业;左右两套动力系统可以控制所述履带实现差速转向,该磁吸附爬壁机器人可以沿管道内壁做全向运动;在沿平直管道的周向行驶时所述磁铁框可绕所述二维调节悬挂系统转动,同时所述前车架也可相对于所述后车架绕所述车体销轴转动,如此所述负重轮a和所述负重轮b可压迫所述履带紧贴壁面;当该磁吸附爬壁机器人斜向行走或管道走向和直径发生变化导致该爬壁机器人两侧的负重轮a和负重轮b与接触的壁面曲率不相同的情况时,所述吸附单元的吸附力迫使所述轴b绕所述限位梁转动,同时所述磁铁框绕所述轴b转动,使所述负重轮a和所述负重轮b与不同曲率的曲面相切,保证该磁吸附爬壁机器人与壁面贴合。
21、步骤c:工作完成后,再次由所述磁力调节系统将磁力降低,使该磁吸附爬壁机器人快速返回出发点。
22、本发明的技术效果:本发明所提供的技术方案,该磁吸附爬壁机器人包括车架、吸附系统、动力系统、二维调节悬挂系统和磁力调节系统;
23、所述车架包括前车架和后车架,所述前车架和所述后车架通过销轴铰接,所述二维调节悬挂系统包括悬挂上部、悬挂中部和悬挂下部,所述悬挂上部、悬挂中部和悬挂下部构成平行四边形连杆机构,所述车架连接所述悬挂上部,所述吸附系统连接所述悬挂下部,所述吸附系统还连接有负重轮,由所述吸附系统提供磁力保证所述负重轮压紧所述履带贴合在工作面上,由二维调节悬挂系统和铰接的前后车架保证车体能贴合复杂的工作面;
24、所述磁力调节机构包括柔性导管、提升钢丝、电动推杆座和电动推杆,其采用类似于自行车刹车线的结构,通过所述电动推杆的伸展和收缩,将所述吸附单元抬起一定角度,改变磁吸附爬壁机器人与工作面之间的磁力。
25、因此该磁吸附爬壁机器人可以贴合复杂的曲面工作,也可以调节所述吸附系统与工作面间的磁力以适应不同的工作模式。
- 还没有人留言评论。精彩留言会获得点赞!