下肢组件和人形机器人的制作方法
本发明涉及人形机器人,具体涉及一种下肢组件和人形机器人。
背景技术:
1、目前,人形机器人能够高度模仿人类的外观和行为,受到了大量用户的关注,人形机器人的下肢组件能够为其提供移动能力,是人形机器人的重要组成部分。现有技术中,下肢组件既要单独设置传动组件带动小腿外壳和脚掌结构移动,又要单独设置壳体来安装电机等零件,使得下肢组件的零件多,重量大。
技术实现思路
1、本发明的目的是提供一种下肢组件和人形机器人,解决下肢组件重量大的问题。
2、为实现本发明的目的,本发明提供了如下的技术方案:
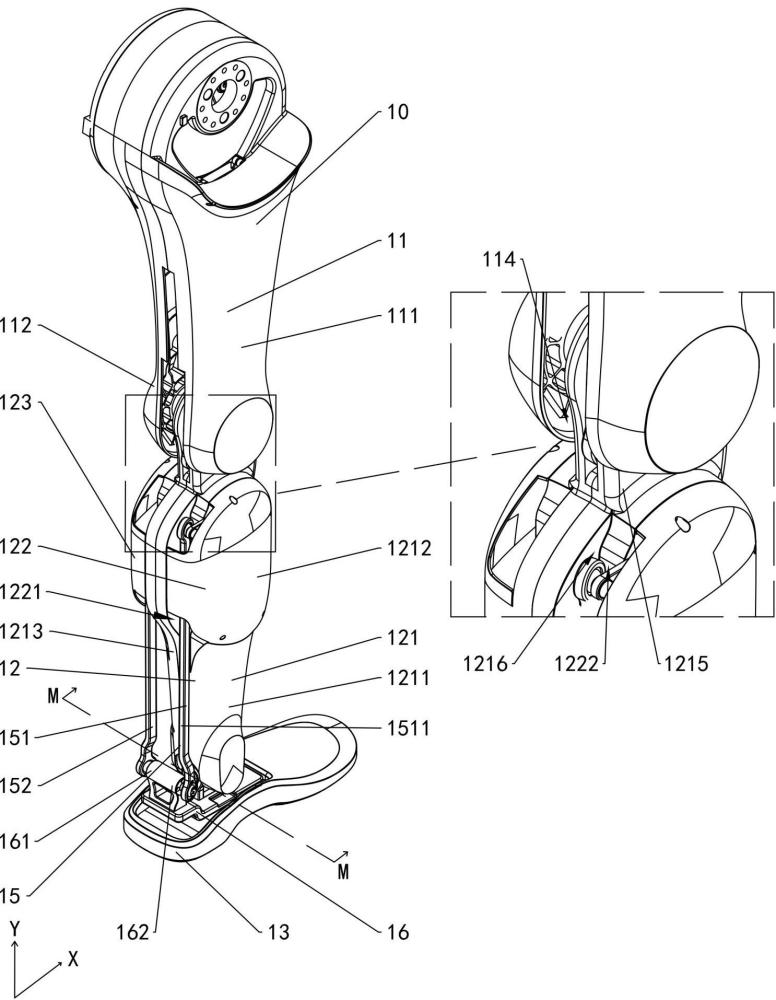
3、第一方面,本发明提供一种下肢组件,用于人形机器人,包括:大腿外壳;小腿外壳,所述小腿外壳包括壳体和第一盖体,所述第一盖体安装在所述壳体沿第一方向上的一侧表面的局部区域,所述壳体的一端与所述大腿外壳转动连接;脚掌结构,与所述壳体远离所述大腿外壳的一端转动连接;第一驱动结构,收容于所述壳体内,所述第一驱动结构被所述第一盖体遮盖;第一传动结构,与所述第一驱动结构以及所述脚掌结构连接,所述第一盖体上开设有第一避让孔和第二避让孔,所述第一避让孔和所述第二避让孔位于所述第一盖体沿第二方向相背的两端,所述第二避让孔位于所述第一避让孔背向所述脚掌结构的一侧,所述第一传动结构穿设于所述第一避让孔,所述第一方向和所述第二方向相交。
4、本技术实施方式的下肢组件,通过设置下肢组件包括大腿外壳、小腿外壳、脚掌结构、第一驱动结构和第一传动结构,小腿外壳包括壳体和第一盖体,第一盖体安装在壳体沿第一方向上的一侧表面的局部区域,壳体的一端与大腿外壳转动连接,脚掌结构与壳体远离大腿外壳的一端转动连接,第一驱动结构收容于壳体内,第一驱动结构被第一盖体遮盖,第一传动结构与第一驱动结构以及脚掌结构连接,第一盖体上开设有第一避让孔和第二避让孔,第一避让孔和第二避让孔位于第一盖体沿第二方向相背的两端,第二避让孔位于第一避让孔背向脚掌结构的一侧,第一传动结构穿设于第一避让孔,第一方向和第二方向相交,小腿外壳既可以实现传动功能又可以收容第一驱动结构,避免单独设置传动组件带动小腿外壳和脚掌结构移动,又单独设置壳体来安装电机等零件,减少了下肢组件的零件,减小了小腿外壳的空间,减轻了下肢组件的重量,并且,遮盖了第一驱动结构,避免对第一驱动结构和第一传动结构的干涉。
5、一种实施方式中,所述小腿外壳还包括第二盖体,所述第二盖体安装在所述壳体沿所述第一方向上的一侧表面的局部区域,所述第二盖体遮盖所述第一驱动结构远离所述第一盖体的一端,所述第一盖体和所述第二盖体相背,所述壳体开设有沿所述第一方向贯通的安装孔,所述第一驱动结构自所述安装孔伸出所述壳体在所述第一方向上相背的两侧表面。
6、如此,通过设置小腿外壳还包括第二盖体,第二盖体安装在壳体沿第一方向上的一侧表面的局部区域,第二盖体遮盖第一驱动结构远离第一盖体的一端,第一盖体和第二盖体相背,壳体开设有沿第一方向贯通的安装孔,第一驱动结构自安装孔伸出壳体在第一方向上相背的两侧表面,提升了壳体的空间利用率,遮盖了第一驱动结构。
7、一种实施方式中,所述壳体包括主壳和连接壳,所述主壳的一端与所述脚掌结构转动连接,所述连接壳连接在所述主壳远离所述脚掌结构的一端的中部,所述连接壳远离所述主壳的一端与所述大腿外壳转动连接,所述主壳在所述第一方向上的尺寸大于所述连接壳在所述第一方向上的尺寸。
8、如此,通过将壳体分为主壳和连接壳,主壳的一端与脚掌结构转动连接,连接壳连接在主壳远离脚掌结构的一端的中部,连接壳远离主壳的一端与大腿外壳转动连接,主壳在第一方向上的尺寸大于连接壳在第一方向上的尺寸,使得主壳和连接壳的连接紧凑,且减小连接壳占用的空间。
9、一种实施方式中,所述主壳包括第一子壳和第二子壳,所述第一子壳和所述第二子壳在所述第一方向上相对并连接,所述安装孔均贯穿所述第一子壳和所述第二子壳,所述第一子壳和所述第二子壳围合有容纳空间,所述容纳空间收容部分所述第一驱动结构,所述第一盖体与所述第一子壳平滑连接,所述第二盖体与所述第二子壳平滑连接。
10、如此,通过将主壳分为第一子壳和第二子壳,第一子壳和第二子壳在第一方向上相对并连接,安装孔均贯穿第一子壳和第二子壳,第一子壳和第二子壳围合有容纳空间,容纳空间收容部分第一驱动结构,第一盖体与第一子壳平滑连接,第二盖体与第二子壳平滑连接,平滑连接降低了制造难度,且提升美观度,第一子壳和第二子壳可以分别安装以形成主壳,从而收容部分第一驱动结构,提升了主壳与第一驱动结构之间安装的便捷程度。
11、一种实施方式中,所述安装孔包括第一子安装孔和第二子安装孔,所述第一子安装孔和所述第二子安装孔在第二方向上间隔设置,所述第一方向与所述第二方向相交;
12、所述第一驱动结构包括第一驱动件和第二驱动件,所述第一传动结构包括第一传动件和第二传动件,所述第一驱动件部分收容于所述容纳空间,并自所述第一子安装孔伸出,所述第二驱动件部分收容于所述容纳空间,并自所述第二子安装孔伸出,所述第一传动件连接在所述第一驱动件背向所述第二子壳的一端,所述第二传动件连接在所述第二驱动件背向所述第一子壳的一端,所述第一传动件远离所述第一驱动件的一端与所述脚掌结构转动连接,所述第二传动件远离所述第二驱动件的一端与所述脚掌结构转动连接。
13、如此,通过将安装孔分为第一子安装孔和第二子安装孔,第一子安装孔和第二子安装孔在第二方向上间隔设置,第一方向与第二方向相交,将第一驱动结构分为第一驱动件和第二驱动件,第一传动结构包括第一传动件和第二传动件,第一驱动件部分收容于容纳空间,并自第一子安装孔伸出,使得第一驱动件的安装紧凑,节省第一驱动件的安装空间,第二驱动件部分收容于容纳空间,并自第二子安装孔伸出,使得第二驱动件的安装紧凑,节省第二驱动件的安装空间,第一传动件连接在第一驱动件背向第二子壳的一端,第二传动件连接在第二驱动件背向第一子壳的一端,避免第一传动件和第二传动件相互干涉,第一传动件远离第一驱动件的一端与脚掌结构转动连接,第二传动件远离第二驱动件的一端与脚掌结构转动连接,第一传动件和第二传动件均与脚掌结构转动连接,提升了脚掌结构转动的稳定程度。
14、一种实施方式中,所述第一子壳开设有第一避让槽,所述第一避让槽与所述第一子安装孔以及所述第二子安装孔均间隔设置,所述第一避让槽收容部分所述第一传动件。
15、如此,通过在第一子壳开设第一避让槽,第一避让槽与第一子安装孔以及第二子安装孔均间隔设置,第一避让槽收容部分第一传动件,使得第一传动件与第一子壳配合紧凑,并且部分第一传动件收容于第一避让槽中,避免第一传动件与第一子壳相互干涉。
16、一种实施方式中,所述连接壳上开设有间隔设置的第一孔、第二孔和第一转轴孔,所述第二孔沿所述第二方向设置于所述第一孔远离所述安装孔的一侧,所述第一孔的轴线在所述第一方向上的正投影与所述第二孔的轴线在所述第一方向上的正投影的连线形成转轴线,所述转轴线经过所述第一转轴孔的轴线在所述第一方向上的正投影,所述第一孔和所述第二孔用于与所述大腿外壳连接,所述第一转轴孔用于安装所述大腿外壳的转轴。
17、如此,通过在连接壳上开设间隔设置的第一孔、第二孔和第一转轴孔,第二孔沿第二方向设置于第一孔远离安装孔的一侧,第一孔的轴线在第一方向上的正投影与第二孔的轴线在第一方向上的正投影的连线形成转轴线,转轴线经过第一转轴孔的轴线在第一方向上的正投影,第一孔和第二孔均可以通过连接件与大腿外壳连接,第一转轴孔与大腿外壳的转轴连接,节省了大腿外壳通过第一孔和第二孔中的连接件带动连接壳转动的能量。
18、一种实施方式中,所述大腿外壳包括第三子壳和第四子壳,所述第三子壳和所述第四子壳在所述第一方向上相对并连接,所述第三子壳和所述第四子壳均与所述连接壳连接,所述第三子壳和所述第四子壳均开设有第二转轴孔,所述第二转轴孔与所述第一转轴孔对应,部分所述第三子壳和部分所述第四子壳具有间隔距离以形成安装空间,所述安装空间收容部分所述连接壳。
19、如此,通过将大腿外壳分为第三子壳和第四子壳,第三子壳和第四子壳在第一方向上相对并连接,第三子壳和第四子壳均与连接壳连接,第三子壳和第四子壳均开设有第二转轴孔,第二转轴孔与第一转轴孔对应,方便了大腿外壳与连接壳之间的连接,部分第三子壳和部分第四子壳具有间隔距离以形成安装空间,安装空间收容部分连接壳,节省了大腿外壳与连接壳之间的安装空间。
20、一种实施方式中,所述第一传动件包括第一传动杆和第一曲柄,所述第一曲柄的一端与所述第一驱动件转动连接,所述第一传动杆的一端与所述第一曲柄远离所述第一驱动件的一端转动连接,所述第一传动杆的另一端与所述脚掌结构转动连接。
21、如此,通过将第一传动件分为第一传动杆和第一曲柄,第一曲柄的一端与第一驱动件转动连接,第一传动杆的一端与第一曲柄远离第一驱动件的一端转动连接,避免了第一曲柄、第一传动杆和第一驱动件的相互干涉,第一传动杆的另一端与脚掌结构转动连接,方便第一驱动件带动脚掌结构移动。
22、一种实施方式中,所述脚掌结构包括踝关节组件,所述踝关节组件包括间隔设置的第一支架和第二支架,所述第一支架与所述第一传动杆转动连接,所述第二支架转动连接在所述第一子壳与所述第二子壳之间。
23、如此,通过设置脚掌结构包括踝关节组件,踝关节组件包括间隔设置的第一支架和第二支架,第一支架与第一传动杆转动连接,方便第一传动杆对踝关节组件的传动,第二支架转动连接在第一子壳与第二子壳之间,方便第一子壳和第二子壳对第二支架的传动,并且节省了空间。
24、一种实施方式中,所述下肢组件还包括第二驱动结构和第二传动结构,所述第二驱动结构与所述第二传动结构转动连接,所述第二驱动结构安装于所述大腿外壳,所述第二传动结构设置于所述大腿外壳内,所述第二传动结构与所述小腿外壳远离所述脚掌结构的一端转动连接。
25、如此,通过设置下肢组件还包括第二驱动结构和第二传动结构,第二驱动结构与第二传动结构转动连接,第二驱动结构安装于大腿外壳,第二传动结构设置于大腿外壳内,第二传动结构与小腿外壳远离脚掌结构的一端转动连接,小腿外壳既可以实现传动功能又可以收容第二驱动结构,减小了小腿外壳的空间,提升了小腿外壳的空间利用率。
26、第二方面,本技术还提供了一种人形机器人,包括第一方面各种实施方式中任一项所述的下肢组件。
- 还没有人留言评论。精彩留言会获得点赞!