转向控制的方法、电子设备及车辆与流程
本技术涉及车辆,尤其涉及一种转向控制的方法、电子设备及车辆。
背景技术:
1、汽车转向系统对汽车的操纵性和安全性至关重要,随着汽车行业的迅猛发展,线控转向系统应运而生。在线控转向系统中,路轮端可以随手轮端的转动而转动,但手轮端却不随路轮端的转动而转动。
2、现有技术中,在运维场景下,可以结合举升机的升降控制,或者,结合程序刷新等方式,控制手轮端和路轮端转动。
3、然而,上述方式会导致转向控制的操作繁琐和安全性差的问题。
技术实现思路
1、本技术实施例提供一种转向控制的方法、电子设备及车辆,用以达到简化转向控制操作的复杂性和提高转向控制的安全性的效果。
2、第一方面,本技术实施例提供一种转向控制的方法,包括:
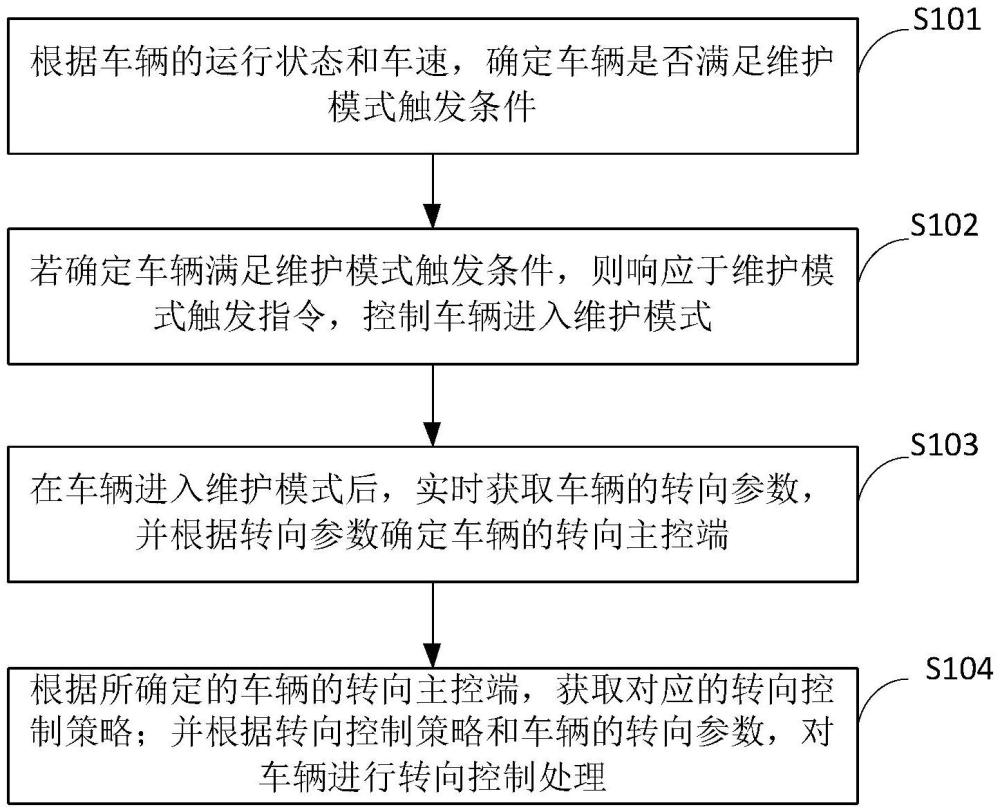
3、根据车辆的运行状态和车速,确定车辆是否满足维护模式触发条件;
4、若确定车辆满足维护模式触发条件,则响应于维护模式触发指令,控制车辆进入维护模式;
5、在车辆进入维护模式后,实时获取车辆的转向参数,并根据所述转向参数确定车辆的转向主控端;
6、根据所确定的车辆的转向主控端,获取对应的转向控制策略;并根据所述转向控制策略和所述车辆的转向参数,对车辆进行转向控制处理。
7、在一种可能的实施方式中,所述运行状态包括整车运行状态和转向运行状态;根据所述运行状态和车速,确定车辆是否满足维护模式触发条件,包括:确定所述整车运行状态是否为上电初始化完成状态;若确定所述整车运行状态为上电初始化完成状态,则确定所述转向运行状态是否为上下对齐完成状态;否则,确定车辆不满足所述维护模式触发条件;若确定所述转向运行状态为上下对齐完成状态,则确定所述车速是否小于第一车速阈值;否则,确定车辆不满足所述维护模式触发条件;若确定车速小于所述第一车速阈值,则确定车辆满足所述维护模式触发条件;否则,确定车辆不满足所述维护模式触发条件。
8、在一种可能的实施方式中,所述转向参数包括:转向角度、转向角速度、转向电机控制电流;所述转向角度包括:手轮端转向角度、路轮端转向角度;所述转向角速度包括:手轮端转向角速度、路轮端转角角速度;所述转向电机控制电流包括:手轮端转向电机控制电流、路轮端转向电机控制电流。
9、在一种可能的实施方式中,根据所述转向参数确定车辆的转向主控端,包括:若确定所述手轮端转向角速度小于第一角速度阈值,且所述路轮端转向电机控制电流大于控制电流阈值,则将路轮端确定为车辆的转向主控端;在将路轮端确定为车辆的转向主控端之后,若确定所述路轮端转向角速度小于第二角速度阈值且超过时间阈值,则将手轮端确定为车辆的转向主控端;若确定所述手轮端转向角度和所述路轮端转向角度之间的差值大于角度差值阈值,和/或,确定所述手轮端转向角速度和所述路轮端转向角速度之间的差值大于角速度差值阈值,则将手轮端确定为车辆的转向主控端。
10、在一种可能的实施方式中,若将手轮端确定为车辆的转向主控端,则根据所述转向控制策略和所述车辆的转向参数,对车辆进行转向控制处理,包括:根据所述转向参数中的手轮端转向角度,确定目标手轮反馈手力;根据所述转向参数中的手轮端转向角度,确定目标路轮端转向角度;根据所述目标手轮反馈手力和所述目标路轮端转向角度,对车辆进行转向控制处理。
11、在一种可能的实施方式中,若将路轮端确定为车辆的转向主控端,则根据所述转向控制策略和所述车辆的转向参数,对车辆进行转向控制处理,包括:将所述路轮端转向电机的输出扭矩设置为零;根据所述转向参数中的路轮端转向角度,确定目标手轮端转向角度;根据所述目标手轮端转向角度,对车辆进行转向控制处理。
12、在一种可能的实施方式中,所述方法还包括:在车辆进入维护模式后,将手轮端确定为车辆的转向主控端。
13、在一种可能的实施方式中,所述方法还包括:若确定车速小于第二车速阈值,且接收到车辆下电请求,则控制车辆退出所述维护模式。
14、第二方面,本技术实施例提供一种转向控制的装置,包括:
15、第一确定模块,用于根据车辆的运行状态和车速,确定车辆是否满足维护模式触发条件;
16、第一控制模块,用于若确定车辆满足维护模式触发条件,则响应于维护模式触发指令,控制车辆进入维护模式;
17、第二确定模块,用于在车辆进入维护模式后,实时获取车辆的转向参数,并根据所述转向参数确定车辆的转向主控端;
18、第二控制模块,用于根据所确定的车辆的转向主控端,获取对应的转向控制策略;并根据所述转向控制策略和所述车辆的转向参数,对车辆进行转向控制处理。
19、在一种可能的实施方式中,所述运行状态包括整车运行状态和转向运行状态;所述第一确定模块,具体用于确定所述整车运行状态是否为上电初始化完成状态;若确定所述整车运行状态为上电初始化完成状态,则确定所述转向运行状态是否为上下对齐完成状态;否则,确定车辆不满足所述维护模式触发条件;若确定所述转向运行状态为上下对齐完成状态,则确定所述车速是否小于第一车速阈值;否则,确定车辆不满足所述维护模式触发条件;若确定车速小于所述第一车速阈值,则确定车辆满足所述维护模式触发条件;否则,确定车辆不满足所述维护模式触发条件。
20、在一种可能的实施方式中,所述转向参数包括:转向角度、转向角速度、转向电机控制电流;所述转向角度包括:手轮端转向角度、路轮端转向角度;所述转向角速度包括:手轮端转向角速度、路轮端转角角速度;所述转向电机控制电流包括:手轮端转向电机控制电流、路轮端转向电机控制电流。
21、在一种可能的实施方式中,所述第二确定模块,具体用于若确定所述手轮端转向角速度小于第一角速度阈值,且所述路轮端转向电机控制电流大于控制电流阈值,则将路轮端确定为车辆的转向主控端;在将路轮端确定为车辆的转向主控端之后,若确定所述路轮端转向角速度小于第二角速度阈值且超过时间阈值,则将手轮端确定为车辆的转向主控端;若确定所述手轮端转向角度和所述路轮端转向角度之间的差值大于角度差值阈值,和/或,确定所述手轮端转向角速度和所述路轮端转向角速度之间的差值大于角速度差值阈值,则将手轮端确定为车辆的转向主控端。
22、在一种可能的实施方式中,若将手轮端确定为车辆的转向主控端,则所述第二控制模块,具体用于根据所述转向参数中的手轮端转向角度,确定目标手轮反馈手力;根据所述转向参数中的手轮端转向角度,确定目标路轮端转向角度;根据所述目标手轮反馈手力和所述目标路轮端转向角度,对车辆进行转向控制处理。
23、在一种可能的实施方式中,若将路轮端确定为车辆的转向主控端,则所述第二控制模块,具体用于将所述路轮端转向电机的输出扭矩设置为零;根据所述转向参数中的路轮端转向角度,确定目标手轮端转向角度;根据所述目标手轮端转向角度,对车辆进行转向控制处理。
24、在一种可能的实施方式中,所述第二确定模块,还具体用于在车辆进入维护模式后,将手轮端确定为车辆的转向主控端。
25、在一种可能的实施方式中,第二控制模块,还具体用于若确定车速小于第二车速阈值,且接收到车辆下电请求,则控制车辆退出所述维护模式。
26、第三方面,本技术实施例提供一种电子设备,包括:存储器,处理器;
27、所述存储器存储计算机执行指令;
28、所述处理器执行所述存储器存储的计算机执行指令,使得所述处理器执行如上第一方面和/或第一方面各种可能的实施方式。
29、第四方面,本技术实施例提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机执行指令,所述计算机执行指令被处理器执行时用于实现如上第一方面和/或第一方面各种可能的实施方式。
30、第五方面,本技术实施例提供一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现如上第一方面和/或第一方面各种可能的实施方式。
31、第六方面,本技术实施例提供一种车辆,包括实现如上第一方面和/或第一方面各种可能的实施方式的转向控制的装置。
32、本技术实施例提供的转向控制的方法、电子设备及车辆,通过根据车辆的运行状态和车速,确定车辆是否满足维护模式触发条件,若确定车辆满足维护模式触发条件,则响应于维护模式触发指令,控制车辆进入维护模式,在车辆进入维护模式后,实时获取车辆的转向参数,并根据转向参数确定车辆的转向主控端,根据所确定的车辆的转向主控端,获取对应的转向控制策略;并根据转向控制策略和车辆的转向参数,对车辆进行转向控制处理,其中,在转向控制的过程中,根据转向参数确定车辆的转向主控端,并根据所确定的车辆的转向主控端对应的转向控制策略,对车辆进行转向控制处理,可以避免维护场景下频繁升降举升机,达到简化转向控制的操作复杂性的效果,也可以避免程序的频繁刷写,达到提高转向控制的安全性的效果。
- 还没有人留言评论。精彩留言会获得点赞!