一种多功能六关节四轮足仿生机器人
本发明属于机器人,具体涉及一种多功能六关节四轮足仿生机器人。
背景技术:
1、由于机器人能够减轻人类的工作量,创進更多的经济价值。因而机器人始终是热门的研究内容,机器人研究领域开展最早,应用最广泛的是地面移动机器人,包括轮式机器人、履带机器人和足式机器人。其中轮式机器人和履带机器人因为其成本低、控制简单、能源效率高以及运动速度快等一系列优点广受用户喜爱。能与地面保持连续接触具有稳定的远动性能,可以实现高速、低能耗的移动,但对于复杂地形通过能力较弱。
2、在崎岖不平的地面上行驶时,轮式机器人和履带机器人的移动效率大大降低,虽然履带式机器人具有更大的连续、可变形接触面,在松软复求的地形下具备一定的适应性,但在陡峭的坡度上稳定性会急剧下降,容易发生倾覆且无法自行恢复。在楼梯等地形更是无法运动。传统的移动机器人如轮式、履带式,虽然具有很快的移动速度,但容易受地形约束。而在地球上,大部分地面都是不平坦的,足式机器人非常适合在非结构化的地形下运动。足式机器人以其离散的点接触远动特性,在非结构化地形中展现出卓越的适应性。
3、足式机器人主要分为双足、四足、多足机器人,而四足机器人相较于双足机器人承载能力强、稳定性好,同时又比六足、八足等多足机器人结构简单,四足机器人更适合作为足式机器人的研究载体。因此受到各国研究人员的普遍重视。
4、随着社会的发展,人们对足式机器人的应用场景和需求越来越多,足式机器人以其较强的环境适应性和运动灵活性被越来越多地应用于国防、航天航空等领域.例如在物流领域,应用足式机器人实现送货上门;在安全领域,校电站应用足式机器人对周边情况进行检查;在工业领域,在复杂的工业生产现场代替工人巡检等。四足机器人集合了机器人领域在硬件机械和软件系统两方面的前沿研究。
5、现有的四足机器人受限于结构与大小,运动形式单一,运动能力受限,难以适应复杂多变的陆地环境,并且稳定性不足。四足机器人的运动能力在平整地面上毫无优势,并且不具备执行能力。
6、公开于该背景技术部分的信息仅仅旨在增加对本发明的总体背景的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域一般技术人员所公知的现有技术。
技术实现思路
1、本发明的目的在于提供一种多功能六关节四轮足仿生机器人,其能够解决上述问题。
2、为了实现上述目的,本发明一具体实施例提供的技术方案如下:
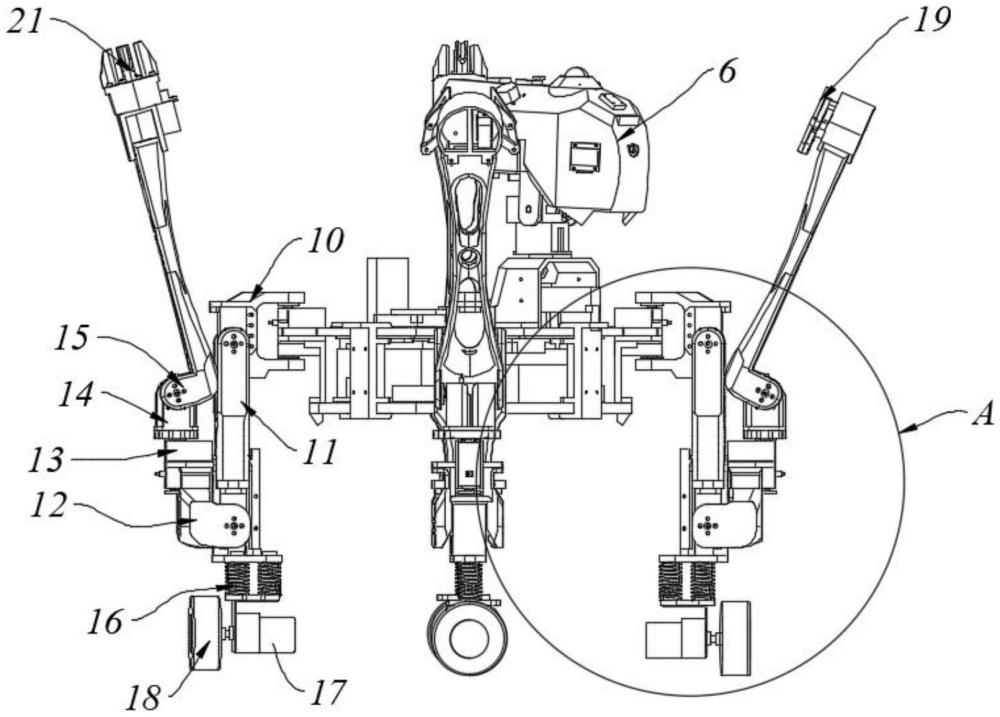
3、一种多功能六关节四轮足仿生机器人,包括有身体控制系统、头颅系统和轮腿部系统。身体控制系统包括有支撑组件、控制电路、激光雷达和锂电池组;头颅系统位于身体控制系统的上侧端面,包括有云台、后脑传感仓和头部脑壳架;轮腿部系统固定连接在身体控制系统的多侧端面,所述轮腿部系统包括有多个腿部组件,所述多个腿部组件分别连接有橡胶轮、花瓣夹爪机构和平行夹爪,所述橡胶轮和平行夹爪用于夹持工具或者行走和越障非结构化路况。
4、在本发明的一个或多个实施例中,所述支撑组件包括有上板和下板,所述上板和下板之间固定连接有多个支撑柱,所述控制电路连接在上板的上侧端面,所述上板和下板之间固定连接有锂电池组。
5、在本发明的一个或多个实施例中,多个腿部组件包括有腿根组件、大腿组件、中腿根组件、中腿转架组件、中腿末节组件和小腿组件。所述腿根组件,过固定框连接在上板上,所述腿根组件连接有第二舵机,所述第二舵机位于固定框内,所述第二舵机带动腿根组件转动;所述大腿组件连接腿根组件,所述腿根组件和大腿组件之间连接第三舵机,所述第三舵机带动大腿组件转动;中腿根组件连接大腿组件的底部端面,所述中腿根组件和大腿组件之间连接第四舵机,所述第四舵机带动中腿根组件转动;所述中腿转架组件连接中腿根组件的底部端面;所述中腿末节组件连接中腿转架组件的底部端面,所述中腿转架组件和中腿末节组件之间连接第五舵机,所述第五舵机带动中腿末节组件转动;所述小腿组件连接中腿末节组件的底部端面,所述小腿组件和中腿末节组件之间连接第六舵机,所述第六舵机带动小腿组件转动。
6、在本发明的一个或多个实施例中,多个腿部组件为四个。
7、在本发明的一个或多个实施例中,多个大腿组件上均固定连接有轮式运动组件,所述轮式运动组件包括有编码电机和橡胶轮,所述编码电机连接橡胶轮。
8、在本发明的一个或多个实施例中,所述大腿组件上固定连接有减震机构,所述减震机构包括有减震器、固定底板和连接板,所述大腿组件一侧端面固定连接有连接板,所述连接板的底部端面固定连接有固定上板,所述固定上板的底部端面固定连接有固定底板,所述固定底板和固定上板之间固定连接有减震器,所述固定底板上固定连接编码电机。
9、在本发明的一个或多个实施例中,其中一对所述小腿组件上固定连接平行夹爪,所述平行夹爪包括有一对齿轮连杆、一对平行夹爪和一对弧形板,一对所述齿轮连杆均连接有第七舵机,所述第七舵机位于小腿组件的内壁端面;一对所述平行夹爪分别固定连接在齿轮连杆上,一对所述平行夹爪上均设置有齿板;一对所述弧形板一侧端面固定连接平行夹爪,一对所述弧形板另一侧端面均固定连接有限位板;其中,一对所述齿轮连杆齿接。
10、在本发明的一个或多个实施例中,其中一对所述小腿组件上固定连接花瓣夹爪机构,所述花瓣夹爪机构包括有底座,所述底座的底部端面固定连接有转盘,所述转盘的底部端面固定连接有限位轴,所述限位轴底部端面连接第一舵机,所述第一舵机的底部端面固定连接在小腿组件的底部端面,所述转盘上开设有多个转动槽,所述底座上开设有与多个转动槽相匹配的限位槽,所述底座顶部端面固定连接有多个花瓣夹爪,多个所述花瓣夹爪分别固定连接在底座的限位槽内。
11、在本发明的一个或多个实施例中,所述上板上还固定连接有应急救援装置,所述应急救援装置一侧端面设置有感温装置,所述感温装置包括有温度传感器和生命探测仪,所述应急救援装置的内壁端面设置有热风机,所述应急救援装置的一侧端面分别设置有吸气口和排气孔,所述热风机与吸气口和排气孔之间连接第一气体输送管道,所述热风机通过排气孔输出热空气,通过吸气孔进行吸附空气。
12、在本发明的一个或多个实施例中,所述应急救援装置的一侧端面设置有气体救援装置,所述气体救援装置包括有氧气瓶和储气瓶,所述氧气瓶设置在应急救援装置的内壁端面,所述应急救援装置的一侧端面设置有多个喷头,所述氧气瓶和多个喷头之间设置有多个第二气体输送管道,所述应急救援装置通过喷头输送氧气。
13、与现有技术相比,本发明的一种多功能六关节四轮足仿生机器人,具有以下益处;
14、1、适用于多种环境,无论是安保巡逻家庭监测,还是探索未知环境,它都可以胜任。其灵活的六轴四足,四轮行走方式,使得机器人能够轻松穿越家中的各个角落;
15、2、通过机械臂,可变形为四机械臂协作加工平台。其机械臂不仅结构精巧,而且具备高度的灵活性和精确性。可拟态成狗式、蜘蛛式、甚至是人形的结构,并且因为每条腿均为六轴机械臂结构,每条腿都具备执行能力,四条腿相互配合,实现运动能力和操作能力的飞跃,静为四机械臂协作平台,动为移动操作平台,从而具有加工和执行能力的结构基础。
16、这款机器人不仅具备高度仿真的生物学特性,更融合了多种先进功能,旨在为用户提供前所未有的便捷与舒适体验。
- 还没有人留言评论。精彩留言会获得点赞!