一种四自由度主动波浪补偿运维登靠装置的制作方法
[0001]
本发明涉及海洋装备技术领域,特别是涉及一种四自由度主动波浪补偿运维登靠装置。
背景技术:
[0002]
海上风力发电是如今应用广泛的一种新能源,风力发电塔需要定期进行维护,运维船在水面上受到波浪的影响,会产生升沉,艏摇,纵摇,横摇,横荡,纵荡6个自由度的位移,维护人员从船体登靠风力发电塔时,也会随着船体的震动而摆动,工作舒适度与生命安全受到严重影响。
[0003]
随着我国能源需求的日益增加,海上风力发电行业迅猛发展,海上风力发电机装机量大幅增加。且装机地点离岸越来越远,功率越来越大,海况也愈恶劣。海上风力发电机在台风,气候等因素的影响下,需要进行定期的保养以及维护。然而,在恶劣的海况下,运维船在波浪的影响下,会产生升沉,艏摇,纵摇,横摇,横荡,纵荡等6个自由度位移。这给维护人员登靠风力发电塔带来了极大的困难与挑战,同时,维护人员的生命安全也受到威胁。所以研制一种主动波浪补偿装置,主动补偿运维船6个自由度不规则运动已成为一个亟待解决的问题。
[0004]
由于运维船在作业过程中,船头是紧靠着风力发电塔的,在运维船6个不规则的自由度中,横荡和纵荡可以依靠运维船自身的动力系统进行补偿,另4个自由度则需要借助主动波浪补偿装置来进行补偿运动,以达到登靠平稳性的目的。目前,国内已有相关技术方案出现。该方案主要通过液压马达驱动齿轮旋转基座,液压缸驱动横摇基座和纵摇基座来补偿船体艏摇,横摇和纵摇产生的位移。其中登陆栈桥通过横摇液压缸与铰链结构安装在纵摇基座上,纵摇基座通过纵摇液压缸和铰链结构安装在旋转基座上,旋转基座则通过液压马达与齿轮结构进行驱动。
[0005]
现有技术主要有两个缺点,其一,旋转机构采用液压马达与齿轮结构,由于登靠栈桥比较重,所需要的齿轮强度要求较高,尺寸也比较大。这种齿轮,制造技术要求高,且成本高,不利于该技术的推广及产业化。其二,该技术不能补偿船体升沉自由度方向的位移,在远离海岸的海况比较恶劣的区域,船体在风力的影响下,升沉较大,登靠装置受升沉影响仍然较大。
技术实现要素:
[0006]
针对现有技术存在的问题,本发明提供一种提高登靠平稳性、增加登靠安全性的四自由度主动波浪补偿运维登靠装置。
[0007]
为了实现上述目的,本发明采用如下技术方案:
[0008]
一种四自由度主动波浪补偿运维登靠装置,包括连接于登靠栈桥的纵摇补偿结构,所述纵摇补偿机构依次连接有横摇补偿结构、艏摇补偿结构及升沉补偿结构,所述所述升沉补偿结构设置于船体的甲板上,所述甲板上设有姿态传感器,所述姿态传感器连接于
控制系统,所述姿态传感器用于检测并实时反馈所述船体在世界坐标系下的偏移值发送给所述控制系统,所述控制系统实时计算船体在纵摇、横摇、艏摇及升沉自由度方向的补偿值,并把补偿值信号传输给所述纵摇补偿结构、所述横摇补偿结构、所述艏摇补偿结构及所述升沉补偿结构,以控制它们的运动。
[0009]
进一步,所述纵摇补偿结构包括纵摇基座和纵摇驱动器,所述纵摇基座通过纵摇铰链连接于所述登靠栈桥,所述纵摇驱动器的两端分别铰接于所述纵摇基座和所述登靠栈桥,通过所述纵摇驱动器的伸缩实现纵摇自由度方向的摆动,用以主动补偿所述船体在纵摇自由度方向的位移。
[0010]
进一步,所述横摇补偿结构包括横摇基座及横摇驱动器,所述横摇基座通过横摇铰链连接于所述纵摇基座,所述横摇驱动器的两端分别铰接于所述纵摇基座和所述横摇基座,通过所述横摇驱动器的伸缩实现横摇自由度方向的摆动,用以主动补偿所述船体在横摇自由度方向的位移。
[0011]
进一步,所述艏摇补偿结构包括旋转基座和艏摇驱动器,所述旋转基座通过轴承座及角接触轴承连接于所述横摇基座,所述艏摇驱动器在行程范围内直线运动,通过所述艏摇驱动器的伸缩驱动所述横摇基座以所述角接触轴承的中心为旋转中心,在一定角度范围内旋转,用以补偿所述船体在艏摇自由度方向的位移。
[0012]
进一步,所述横摇基座设有连接板,所述连接板上设有轴承随动器,所述轴承随动器通过浮动接头连接于所述艏摇驱动器。
[0013]
进一步,所述旋转基座上设有直线导轨,所述轴承随动器限制于所述直线导轨内,沿所述直线导轨移动,所述艏摇驱动器伸缩时,驱动所述轴承随动器沿所述直线导轨移动,进而驱动所述角接触轴承及所述横摇基座同时旋转。
[0014]
进一步,所述升沉补偿结构包括升降基座、升降驱动器及剪叉机构,所述剪叉机构的顶部连接于所述旋转基座,底部连接于所述升降基座,所述升降驱动器的两端分别铰接于所述剪叉机构的上部和下部,通过所述升降驱动器的伸缩实现所述旋转基座的升降,用以补偿所述船体在升沉自由度方向的位移。
[0015]
进一步,所述剪叉机构的顶部和底部分别通过升降铰链连接于所述旋转基座和所述升降基座。
[0016]
进一步,所述升降驱动器、所述艏摇驱动器、所述横摇驱动器及所述纵摇驱动器为液压缸或伺服电缸。
[0017]
进一步,所述控制系统电性连接于所述升降驱动器、所述艏摇驱动器、所述横摇驱动器及所述纵摇驱动器的控制阀,通过所述控制系统自动控制各驱动器的伸缩量,从而主动补偿所述船体的偏移量。
[0018]
本发明的有益效果:
[0019]
本发明通过纵摇补偿结构、横摇补偿结构、艏摇补偿结构及升沉补偿结构主动补偿船体受波浪影响产生的纵摇、横摇、艏摇及升沉四个自由度方向的位移,可以维护工作人员生命安全,提高工作舒适度,使工作人员可以通过海上运维船平稳登靠至海上风力发电塔。本发明装置能省去高强度大齿轮的制造,降低加工制造成本,有利于技术推广和产业化,同时能补偿船体在艏摇,纵摇,横摇和升沉四个自由度的位移,提高登靠平稳性,增加登靠安全性。
附图说明
[0020]
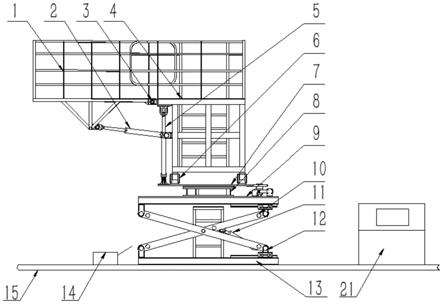
图1为本发明四自由度主动波浪补偿运维登靠装置的正视图;
[0021]
图2为本发明四自由度主动波浪补偿运维登靠装置的俯视图;
[0022]
图中,1—登靠栈桥、2—纵摇驱动器、3—纵摇铰链、4—纵摇基座、5—横摇驱动器、6—横摇铰链、7—横摇基座、8—轴承座、9—旋转基座、10—剪叉机构、11—升降驱动器、12—升降铰链、13—升降基座、14—姿态传感器、15—甲板、16—登乘梯、17—直线导轨、18—轴承随动器、19—浮动接头、20—艏摇驱动器、21—控制系统。
具体实施方式
[0023]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0024]
需要说明,本发明实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
[0025]
如图1及图2,本发明提供一种四自由度主动波浪补偿运维登靠装置,包括连接于登靠栈桥1的纵摇补偿结构,纵摇补偿机构依次连接有横摇补偿结构、艏摇补偿结构及升沉补偿结构,升沉补偿结构设置于船体的甲板15上,甲板15的一侧设有登乘梯16,维护人员通过登乘梯16爬上登靠装置,再通过登靠装置平稳登上风力发电塔进行作业。甲板15上设有姿态传感器14,姿态传感器14连接于控制系统21,姿态传感器14用于检测并实时反馈船体在世界坐标系下的偏移值发送给控制系统21,控制系统21实时计算船体在纵摇、横摇、艏摇及升沉自由度方向的补偿值,并把补偿值信号传输给纵摇补偿结构、横摇补偿结构、艏摇补偿结构及升沉补偿结构,以控制它们的运动。
[0026]
登靠装置的登靠栈桥1的一端紧靠风力发电塔,另一端连接于纵摇补偿结构。纵摇补偿结构包括纵摇基座4和纵摇驱动器2,纵摇基座4通过纵摇铰链3连接于登靠栈桥1,纵摇驱动器2的两端分别铰接于纵摇基座4和登靠栈桥1,在本实施例中,纵摇驱动器2为液压缸,在其它实施例中,纵摇驱动器2也可以是伺服电缸。纵摇驱动器2的一端与登靠栈桥1底部中间部位通过铰链连接,另一端与纵摇基座4通过铰链连接。通过纵摇驱动器2的伸缩实现登靠装置在纵摇自由度方向的摆动,用以主动补偿船体在纵摇自由度方向的位移,确保登靠栈桥与风力发电塔成相对垂直角度。
[0027]
横摇补偿结构包括横摇基座7及横摇驱动器5,横摇基座7通过横摇铰链6连接于纵摇基座4,横摇驱动器5的两端分别铰接于纵摇基座4和横摇基座7,在本实施例中,横摇驱动器5为液压缸,在其它实施例中,纵摇驱动器5也可以是伺服电缸。通过横摇驱动器5的伸缩可实现纵摇基座4围绕横摇铰链6在横摇自由度方向的摆动,用以主动补偿船体在横摇自由度方向的位移。
[0028]
艏摇补偿结构包括旋转基座9和艏摇驱动器20,旋转基座9通过轴承座8及角接触轴承连接于横摇基座7,构成旋转自由度。在本实施例中,横摇基座7设有连接板,连接板上设有轴承随动器18,轴承随动器18通过浮动接头19连接于艏摇驱动器20,通过浮动接头19
使轴承随动器18随着艏摇驱动器20的移动而移动,轴承随动器18则带动角接触轴承旋转。旋转基座9上设有直线导轨17,轴承随动器18限制于直线导轨17内,沿直线导轨17移动,艏摇驱动器20伸缩时,驱动轴承随动器沿直线导轨移动,进而驱动角接触轴承及横摇基座7同时旋转,角接触轴承起支撑作用。在本实施例中,艏摇驱动器20为液压缸,在其它实施例中,艏摇驱动器20也可以是伺服电缸。艏摇驱动器20沿着直线导轨17方向在行程范围内运动,则横摇基座7以角接触轴承的中心为旋转中心,可在一定角度范围内旋转,用以补偿船体在艏摇自由度方向的位移。本发明艏摇补偿结构将直线运动转变为旋转运动,避免高强度、大尺寸的齿轮制造,有效降低了制造成本,便于技术的推广及产业化。
[0029]
升沉补偿结构包括升降基座13、升降驱动器11及剪叉机构10,剪叉机构10的顶部连接于旋转基座9,底部连接于升降基座13,在本实施例中,剪叉机构10的顶部和底部分别通过升降铰链12连接于旋转基座9和升降基座13。升降驱动器11的两端分别铰接于剪叉机构10的上部和下部,在本实施例中,升降驱动器11为液压缸,在其它实施例中,升降驱动器11也可以是伺服电缸。通过升降驱动器11的伸缩实现旋转基座9的升降,用以补偿船体在升沉自由度方向的位移。采用升降驱动器11及剪叉机构10,形成一种省空间的升降装置,应用于波浪补偿装置中,有利于节省高度空间,同时可补偿船体升沉方向的位移,更加有利于登乘的稳定性。
[0030]
升降基座13安装在船头的甲板15上,姿态传感器14安装在靠近升降基座13的甲板15上。姿态传感器14实时反馈船体在世界坐标系下的偏移值给控制系统21,控制系统21实时计算船体在纵摇、横摇、艏摇及升沉自由度方向的补偿值,并把补偿值通过信号传输给纵摇驱动器2、横摇驱动器5、艏摇驱动器20及升降驱动器11的控制阀,用以控制各驱动器的伸缩量,从而主动补偿船体的偏移量。登靠装置在自动控制模式下与风力发电塔保持相对静止状态,维护人员通过登乘梯16爬上登靠装置,再通过登靠装置平稳登上风力发电塔进行作业。
[0031]
本发明通过纵摇补偿结构、横摇补偿结构、艏摇补偿结构及升沉补偿结构主动补偿船体受波浪影响产生的纵摇、横摇、艏摇及升沉四个自由度方向的位移,可以维护工作人员生命安全,提高工作舒适度,使工作人员可以通过海上运维船平稳登靠至海上风力发电塔。本发明装置能省去高强度大齿轮的制造,降低加工制造成本,有利于技术推广和产业化,同时能补偿船体在艏摇,纵摇,横摇和升沉四个自由度的位移,提高登靠平稳性,增加登靠安全性。
[0032]
以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1