一种可接驳的水下滑翔机的制作方法
[0001]
本发明涉及船舶领域,尤其是涉及一种可接驳的水下滑翔机。
背景技术:
[0002]
水下滑翔机的技术已比较成熟,其能依靠自身的重力和浮力以极低的功耗在水下进行锯齿状航行,但是无法停止航行进行水下接驳作业。目前可用于水下接驳的主要是水下机器人,如auv(自主式水下航行器)、rov(无人遥控潜水器)等,但无法实现远距离航行。
[0003]
为了使水下滑翔机兼具水下远距离航行和水下接驳机动作业的优点,出现了混合型水下滑翔机的设计,在水下滑翔机的尾部加装了推进装置,使水下滑翔机具备机动作业的能力。但是该设计仅仅在常规的水下滑翔机后方加装了螺旋桨,螺旋桨在行驶过程中阻力较大、使水下滑翔机在航行过程中的整体阻力增大,在机动状态下两侧的机翼又降低了水下滑翔机的机动性能,且水下滑翔机尾部的推进方式本身不利于水下滑翔机在作业状态下的操控。
技术实现要素:
[0004]
考虑到上述问题,本发明设计了一种兼具水下低功耗远距离航行以及水下接驳机动作业能力的新型水下滑翔机,其解决了现有混合型水下滑翔机航行阻力较大和作业机动能力差的问题。
[0005]
在第一方面,提供了一种可接驳的水下滑翔机,所述水下滑翔机包括主体舱、推进器、垂直尾翼、滑翔翼、旋翼和控制单元;其中:所述控制单元设置在所述主体舱的前端,其被配置为控制位于所述主体舱前端的所述推进器以便于所述水下滑翔机进行水下接驳作业,位于所述推进器上的所述旋翼为可折叠旋翼;所述滑翔翼与所述主体舱连接,所述滑翔翼通过折叠收入所述主体舱;所述垂直尾翼设置在所述主体舱的尾端。
[0006]
具体地,所述水下滑翔机具有滑翔状态、滑翔-作业转换状态、作业状态以及作业-滑翔转换状态。
[0007]
在所述滑翔状态下,水下滑翔机处于水平状态,所述滑翔翼处于展开状态,所述旋翼在水流的作用下处于折叠状态,所述控制单元被配置为控制排水体积以形成前向推力,使得水下滑翔机以锯齿状向前航行。
[0008]
在所述滑翔-作业转换状态下,所述滑翔翼处于收拢状态以减弱前向推力,所述控制单元被配置为控制重量配置,使得水下滑翔机处于竖直状态。
[0009]
在所述作业状态下,所述推进器处于工作状态,所述旋翼处于展开状态,水下滑翔机处于竖直状态,所述控制单元被配置为控制所述推进器的推力方向使得水下滑翔机抵达作业区域以完成水下接驳。
[0010]
在所述作业-滑翔转换状态下,水下滑翔机向上运动至第一高度后,所述滑翔翼处于展开状态,所述控制单元被配置为控制重量配置使水下滑翔机处于水平状态,所述推进器在水下滑翔机正常行驶后停止工作,所述旋翼处于折叠状态。
[0011]
在第二方面,提供了一种控制水下滑翔机进行接驳作业的方法,所述水下滑翔机包括主体舱、推进器、垂直尾翼、滑翔翼和旋翼;所述方法包括:在所述水下滑翔机处于滑翔状态的情况下,水下滑翔机处于水平状态,所述滑翔翼处于展开状态,所述旋翼在水流的作用下处于折叠状态,控制排水体积以形成前向推力,使得水下滑翔机以锯齿状向前航行;在所述水下滑翔机处于滑翔-作业转换状态的情况下,所述滑翔翼处于收拢状态以减弱前向推力,控制重量配置使得水下滑翔机处于竖直状态;在所述水下滑翔机处于作业状态的情况下,所述推进器处于工作状态,所述旋翼处于展开状态,水下滑翔机处于竖直状态,控制所述推进器的推力方向使得水下滑翔机抵达作业区域以完成水下接驳;以及在所述水下滑翔机处于作业-滑翔转换状态的情况下,水下滑翔机向上运动至第一高度后,所述滑翔翼处于展开状态,控制重量配置使水下滑翔机处于水平状态,所述推进器在水下滑翔机正常行驶后停止工作,所述旋翼处于折叠状态。
[0012]
具体地,所述控制单元设置在所述主体舱的前端,其被配置为控制位于所述主体舱前端的所述推进器以便于所述水下滑翔机进行水下接驳作业,位于所述推进器上的所述旋翼为可折叠旋翼;所述滑翔翼与所述主体舱连接,所述滑翔翼通过折叠收入所述主体舱;所述垂直尾翼设置在所述主体舱的尾端。
[0013]
在第三方面,提供了一种存储有指令的非暂时性计算机可读介质,当所述指令由处理器执行时,执行第二方面中的各个步骤。
附图说明
[0014]
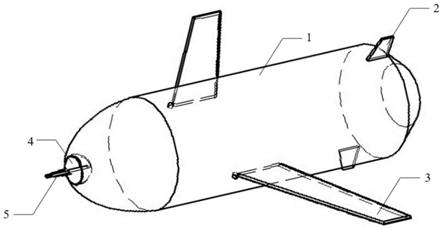
图1为根据本发明实施例的处于滑翔状态的水下滑翔机的结构示意图;
[0015]
图2为根据本发明实施例的处于滑翔状态下的推进器的结构示意图;
[0016]
图3为根据本发明实施例的处于作业状态的水下滑翔机的结构示意图;以及
[0017]
图4为根据本发明实施例的处于作业状态下的推进器的结构示意图。
具体实施方式
[0018]
本发明第一方面提供了一种可接驳的水下滑翔机,图1为根据本发明实施例的处于滑翔状态的水下滑翔机的结构示意图。如图1所示,可接驳的水下滑翔机包括主体舱1、推进器(未示出)、垂直尾翼2、滑翔翼3、旋翼5和控制单元4。所述控制单元4设置在所述主体舱1的前端,其被配置为控制位于所述主体舱1前端的所述推进器以便于所述水下滑翔机进行水下接驳作业,位于所述推进器上的所述旋翼5为可折叠旋翼;所述滑翔翼3与所述主体舱1连接,所述滑翔翼3通过折叠收入所述主体舱1;所述垂直尾翼2设置在所述主体舱1的尾端。
[0019]
根据本发明实施例的水下滑翔机具有四种状态,分别为:滑翔状态、滑翔-作业转换状态、作业状态以及作业-滑翔转换状态。
[0020]
(1)在水下滑翔机处于滑翔状态的情况下,此时水下滑翔机处于水平状态,水下滑翔机两侧的滑翔翼处于展开状态,水下滑翔机前端的旋翼在水流的作用下处于折叠状态,该旋翼可以是螺旋桨旋翼,控制单元控制排水体积,使得水下滑翔机通过依靠自身的浮力或重力形成前向推力,使得水下滑翔机以锯齿状向前航行,具体如图1-2所示。
[0021]
(2)在水下滑翔机处于滑翔-作业转换状态的情况下,当水下滑翔机抵达海底某一作业区域,需要从滑翔状态切换为作业状态,此时水下滑翔机具有一定的航行速度,需要降
低水下滑翔机的航行速度。在航行的过程中,所述滑翔翼处于收拢状态以减弱前向推力,水下滑翔机在海水的阻力下速度降低,控制单元控制重量配置使得水下滑翔机处于竖直状态。
[0022]
(3)在水下滑翔机处于作业状态的情况下,所述推进器处于工作状态,推进器的转轴开始旋转,所述旋翼在转轴的带动下开始旋转,离心力作用下旋翼处于展开状态,产生推力,此时水下滑翔机的速度趋近于零,处于竖直状态,控制单元控制所述推进器的推力方向使得水下滑翔机抵达作业区域以完成水下接驳,具体如图3-4所示。
[0023]
(4)在水下滑翔机处于作业-滑翔转换状态的情况下,待水下接驳作业完成,需要从作业状态切换为滑翔状态。此时水下滑翔机在推进器旋翼的推力下先向上运动,水下滑翔机向上运动至第一高度后,所述滑翔翼处于展开状态,控制单元控制重量配置使水下滑翔机处于水平状态。在水平状态下推进器产生向前的运动速度,待运动速度达到一定值后,水下滑翔机在滑翔翼的推力下可以正常行驶,所述推进器在水下滑翔机正常行驶后停止工作,所述旋翼在水流阻力的作用下处于折叠状态。
[0024]
本发明第一方面的技术方案能够实现低功耗的滑翔和作业状态的切换,且具有行驶阻力小、作业机动性强的优点,能够水下长距离长时间运作。以上描述是对本发明的解释,不是对发明的限定,本发明所限定的范围参见权利要求,在不违背本发明的基本结构的情况下,本发明可以作任何形式的修改。
[0025]
本发明在第二方面,提供了一种控制水下滑翔机进行接驳作业的方法,所述水下滑翔机包括主体舱、推进器、垂直尾翼、滑翔翼和旋翼;所述方法包括:在所述水下滑翔机处于滑翔状态的情况下,水下滑翔机处于水平状态,所述滑翔翼处于展开状态,所述旋翼在水流的作用下处于折叠状态,控制排水体积以形成前向推力,使得水下滑翔机以锯齿状向前航行;在所述水下滑翔机处于滑翔-作业转换状态的情况下,所述滑翔翼处于收拢状态以减弱前向推力,控制重量配置使得水下滑翔机处于竖直状态;在所述水下滑翔机处于作业状态的情况下,所述推进器处于工作状态,所述旋翼处于展开状态,水下滑翔机处于竖直状态,控制所述推进器的推力方向使得水下滑翔机抵达作业区域以完成水下接驳;以及在所述水下滑翔机处于作业-滑翔转换状态的情况下,水下滑翔机向上运动至第一高度后,所述滑翔翼处于展开状态,控制重量配置使水下滑翔机处于水平状态,所述推进器在水下滑翔机正常行驶后停止工作,所述旋翼处于折叠状态。
[0026]
具体地,所述控制单元设置在所述主体舱的前端,其被配置为控制位于所述主体舱前端的所述推进器以便于所述水下滑翔机进行水下接驳作业,位于所述推进器上的所述旋翼为可折叠旋翼;所述滑翔翼与所述主体舱连接,所述滑翔翼通过折叠收入所述主体舱;所述垂直尾翼设置在所述主体舱的尾端。
[0027]
本发明在第三方面,提供了一种存储有指令的非暂时性计算机可读介质,当所述指令由处理器执行时,执行第二方面中的各个步骤。
[0028]
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1