一种扑翼式仿生转向机构的制作方法
1.本发明涉及仿生机器人领域,尤其涉及的是一种扑翼式仿生转向机构。
背景技术:
2.水下机器人的高机动性是满足海洋环境研究、海底资源勘探和海防战略需求的重要指标。转向机构是实现水下机器人高机动性的关键机构。现有的水下机器人的转向机构在水下作业时存在灵活性差、噪音高、能量利用率低的问题。
技术实现要素:
3.本发明的目的在于克服现有技术的不足,提供了一种结构简单、灵活性好、噪音小、能量利用率高的扑翼式仿生转向机构。
4.本发明是通过以下技术方案实现的:
5.一种扑翼式仿生转向机构,包括基板,所述基板上设有左右对称分布的两套扑翼单元,每套扑翼单元包括一组仿生摆动机构和一组仿生旋转机构;
6.每组仿生摆动机构包括第一电机、主动齿轮、从动齿轮,第一电机固定安装在基板上,主动齿轮固定套装在第一电机的输出轴上,从动齿轮转动安装在基板上,且从动齿轮的轴心线与基板相垂直,从动齿轮与主动齿轮相啮合;
7.每组仿生旋转机构包括第二电机、仿生扑翼,所述第二电机固定安装在从动齿轮背离基板一端的端面上,仿生扑翼的一端设有连接轴,仿生扑翼的连接轴与第二电机的输出轴同轴固定连接,且仿生扑翼的连接轴与从动齿轮的轴心线相垂直;
8.通过第一电机带动主动齿轮转动,主动齿轮再带动从动齿轮转动,安装在从动齿轮上的仿生旋转机构随着从动齿轮一起转动,从而带动仿生扑翼绕着从动齿轮的轴心线转动,实现对两套扑翼单元中两个仿生扑翼之间角度的调整;通过第二电机带动仿生扑翼绕着连接轴的轴心线转动,实现对仿生扑翼自身角度的调整。
9.进一步的,所述仿生扑翼的连接轴通过一个轴承座转动支撑,轴承座固定安装在基板上,仿生扑翼的连接轴与第二电机的输出轴之间通过联轴器相连接。
10.进一步的,所述仿生扑翼呈扁平状。
11.进一步的,所述从动齿轮通过一个轴承转动套装在一个中心轴上,中心轴固定在基板上,中心轴上在位于轴承外侧套装有一个卡簧。
12.进一步的,所述第一电机通过一个呈z字形的第一电机支座安装在基板上。
13.进一步的,所述第二电机通过一个呈l形的第二电机支座安装在从动齿轮上。
14.本发明相比现有技术具有以下优点:
15.本发明提供的一种扑翼式仿生转向机构,其通过设置两套左右对称的扑翼单元,每套扑翼单元包括一组仿生摆动机构和一组仿生旋转机构,通过仿生摆动机构能带动整个仿生旋转机构整体摆动,从而带动仿生扑翼前后摆动,从而能实现仿生转向机构的前进或后退;通过仿生旋转机构可带动仿生扑翼自身旋转,从而调整仿生扑翼与水面的角度,进而
能调节前进阻力的大小,当左右两套扑翼单元的前进阻力调整为不相同时,即可控制仿生转向机构向左转弯或向右转弯。将该仿生转向机构运用于水下机器人,可实现前进、后退、向左转弯或向右转弯的灵活控制,且本发明结构简单,噪音小,能量利用率高。
附图说明
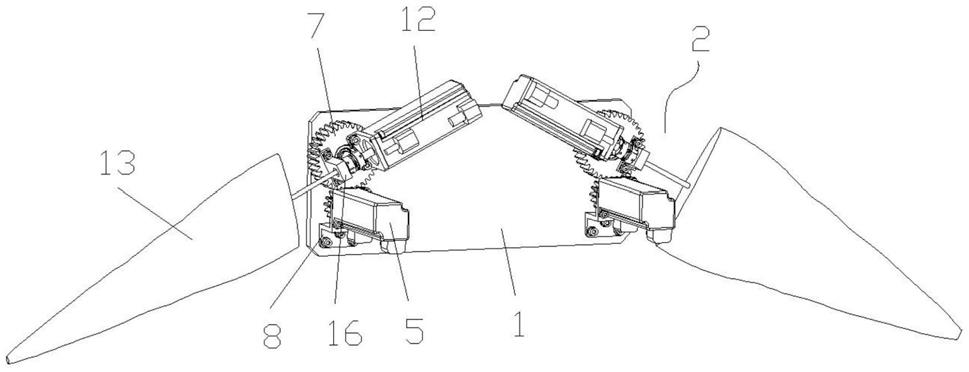
16.图1是本发明的整体结构示意图。
17.图2是本发明的仿生旋转机构的结构示意图。
18.图3是本发明的仿生摆动机构结构示意图。
19.图中标号:1基板;2扑翼单元;3仿生摆动机构;4仿生旋转机构;5第一电机;6主动齿轮;7从动齿轮;8第一电机支座;9轴承;10中心轴;11卡簧;12第二电机;13仿生扑翼;14第二电机支座;15连接轴;16轴承座;17联轴器。
具体实施方式
20.下面对本发明的实施例作详细说明,本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
21.下面对本发明的实施例作详细说明,本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
22.参见图1至图3,本实施例公开了一种扑翼式仿生转向机构,包括基板1,基板1上设有左右对称分布的两套扑翼单元2,每套扑翼单元2包括一组仿生摆动机构3和一组仿生旋转机构4。
23.每组仿生摆动机构3包括第一电机5、主动齿轮6、从动齿轮7,第一电机5通过一个呈z字形的第一电机支座8安装在基板1上,第一电机支座8与基板1之间、第一电机5与第一电机支座8之间分别通过螺钉固定安装,设置第一电机支座8为z字形,是为了给主动齿轮6的安装预留空间,从而保证整个仿生摆动机构3整体布局紧凑。主动齿轮6固定套装在第一电机5的输出轴上,从动齿轮7转动安装在基板1上,且从动齿轮7的轴心线与基板1相垂直,从动齿轮7通过一个轴承9转动套装在一个中心轴10上,中心轴10固定在基板1上,中心轴10上在位于轴承9外侧套装有一个卡簧11,通过卡簧11可防止轴承9脱落;从动齿轮7与主动齿轮6相啮合。
24.每组仿生旋转机构4包括第二电机12、仿生扑翼13,第二电机12固定安装在从动齿轮7背离基板1一端的端面上,第二电机12通过一个呈l形的第二电机支座14安装在从动齿轮7上,第二电机12与第二电机支座14之间、第二电机支座14与从动齿轮7之间分别通过螺钉固定安装。仿生扑翼13呈扁平状,仿生扑翼13的一端设有连接轴15,仿生扑翼13的连接轴15通过一个轴承座16转动支撑,轴承座16固定安装在基板1上。仿生扑翼13的连接轴15与第二电机12的输出轴同轴固定连接,仿生扑翼13的连接轴15与第二电机12的输出轴之间通过联轴器17相连接,且仿生扑翼13的连接轴15与从动齿轮7的轴心线相垂直。
25.通过第一电机5带动主动齿轮6转动,主动齿轮6再带动从动齿轮7转动,安装在从动齿轮7上的仿生旋转机构4随着从动齿轮7一起转动,从而带动仿生扑翼13绕着从动齿轮7
的轴心线转动,实现对两套扑翼单元2中两个仿生扑翼13之间角度的调整;通过第二电机12带动仿生扑翼13绕着连接轴15的轴心线转动,实现对仿生扑翼13自身角度的调整。
26.本实施例提供的扑翼式仿生转向机构的工作过程如下:
27.当整个仿生转向机构需要向前运动时,第二电机12带动仿生扑翼13转动,使仿生扑翼13旋转到与前进方向阻力最小的状态,然后第一电机5带动主动齿轮6转动,主动齿轮6带动从动齿轮7转动,从动齿轮7再带动整个仿生旋转机构4一起向前进方向摆动,使得仿生扑翼13一起摆动到最前端的位置。然后第二电机12带动仿生扑翼13转动,使其旋转到与前进方向阻力最大的状态;再由第一电机5反向转动,带动主动齿轮6反向转动,主动齿轮6带动从动齿轮7反向转动,从动齿轮7带动整个仿生旋转机构4反向摆动,使得仿生扑翼13一起向后摆动到最后端的位置,进而推动整个仿生转向机构前进;重复上述过程,使整个仿生转向机构一直保持前进状态。
28.当整个仿生转向机构需要向左转弯时,根据转弯半径的大小,位于左侧的第二电机12带动左侧的仿生扑翼13转动调整到一个合适的角度,再由位于左侧的第一电机5带动左侧的仿生旋转机构4及仿生扑翼13张开到一定的位置并保持该状态;位于右侧的仿生旋转机构4、仿生摆动机构3按照正常前进的步骤进行运动;这样,由于左侧的阻力大,整个仿生转向机构右侧的动力使整个仿生转向机构向左侧偏转,达到向左转弯的目的。
29.当整个仿生转向机构需要向右转弯时,根据转弯半径的大小,位于右侧的第二电机12带动右侧的仿生扑翼13调整到一个合适的角度,再由右侧的第一电机5带动整个仿生旋转机构4及仿生扑翼13张开到一定的位置并保持该状态;位于左侧的仿生旋转机构4、仿生摆动机构3按照正常前进的步骤进行运动,这样,由于右侧的阻力大,整个仿生转向机构左侧的动力使整个整个仿生转向机构向右侧偏转,达到向右转弯的目的。
30.帝企鹅有极高的游泳本领,具有爆发力强、机动性高、稳定性好等特点,在捕食和躲避攻击时,通过其扑翼的小幅翻转即可轻松实现转向、浮沉、横滚和u形转弯等机动动作;本实施例提供的扑翼式仿生转向机构,正是对帝企鹅的扑翼特征进行仿生,为水下机器人提供一种具有高机动性的扑翼式仿生转向机构,利用仿生扑翼的摆动结合仿生扑翼自身的翻转,即可在水下轻松实现转向,突破了现有技术中水下机器人存在的转向不灵活的瓶颈,具有很好的应用前景。
31.以上仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1