一种可飞行无人船的制作方法
[0001]
本实用新型涉及无人船领域,具体的,涉及一种可飞行无人船。
背景技术:
[0002]
作为一种新兴的水上作业载体,无人船逐渐被应用于水质监测、水文调查、水样采集、视频采集、水体保洁、河道巡查、暗管排查、港务计重等各种场合。但受直立岸堤高度、护栏设置、护坡绿化带宽度、现场着力点等现场条件的制约,无人船的下水投放和回收成为突出的问题,甚至因此影响到无人船的推广普及。
[0003]
目前主要采用如下三种技术方案:
[0004]
(一)岸基护坡人力投放及回收
[0005]
在具有斜立护坡、人员能到达的岸基,常采用最传统的人力办法投放及回收。这种方案需要2至4人现场作业且仅适用于长度1.6米以内的小型无人船。
[0006]
(二)较高岸基搭设悬梯人力投放及回收
[0007]
岸堤高度3米以内的场合,作业人员搭设悬梯人力投放及回收。这种方案需要至少4人现场作业且仅适用于长度1.6米以内的小型无人船,悬梯作业有一定的危险性,高度3米以上的岸堤现场无法施行,局限性较强。
[0008]
(三)吊车吊笼投放及回收
[0009]
针对上述两种技术方案存在的弊端,有些单位选择采用货车改装的吊臂车或吊臂船进行投放和回收。这种方案收到现场道路条件和岸基宽度的制约,很多河岸绿化带、泥沙岸基与小区河道无法进入,同时此方案投入成本也较高。
技术实现要素:
[0010]
本实用新型提供了一种可飞形无人船,其能够适于不同地形及水域条件的投放、回收和应急操控。
[0011]
为了解决上述技术问题,本实用新型的技术方案是:
[0012]
一种可飞行无人船,包括:
[0013]
船体;
[0014]
飞行机构,安装于所述船体;
[0015]
驱动机构,固定于所述船体,并与所述飞行机构传动连接,以能驱动所述飞行机构从而提升该可飞行无人船。
[0016]
进一步的,所述飞行机构包括:
[0017]
位于船体上方的旋翼;以及
[0018]
设置于船体尾部的尾翼。
[0019]
进一步的,所述尾翼通过尾梁与所述船体相连。
[0020]
进一步的,所述飞行机构包括:
[0021]
均匀分布于所述船体周向的多个旋翼。
[0022]
进一步的,所述船体包括平行设置的两个浮体,以及连接于两所述浮体之间的设备舱。
[0023]
进一步的,所述设备舱内设置有多参数水质仪和/或adcp测流仪。
[0024]
进一步的,所述设备舱外设置有摄像机。
[0025]
进一步的,所述驱动机构为油电混合动力机构。
[0026]
进一步的,所述设备舱和/或所述浮体内设置有与所述驱动机构电性连接的锂电池及燃油箱。
[0027]
进一步的,所述浮体下方连接有停放架。
[0028]
本实用新型具有如下优点:
[0029]
该可飞行无人船大大扩展了无人船的应用范围,港口码头、高岸基河道、宽绿化带河岸河道、泥沙坡岸河道、湿地水草环绕湖泊等场合不再会对无人船投放和回收造成制约影响,压缩了现场的人力成本。
附图说明
[0030]
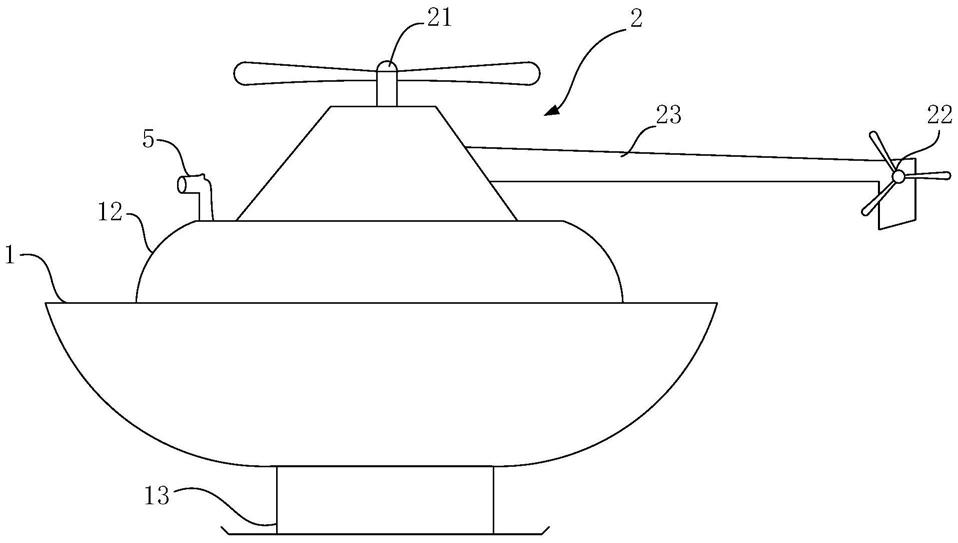
图1是本实用新型中可飞形无人船的主视角度结构示意图;
[0031]
图2是本实用新型中可飞形无人船的侧视角度结构示意图;
[0032]
图中所示:1、船体;11、浮体;12、设备舱;13、停放架;2、飞行机构;21、旋翼;22、尾翼;23、尾梁;3、多参数水质仪;4、adcp测流仪;5、摄像机;6、锂电池;7、燃油箱。
具体实施方式
[0033]
为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图对本实用新型的具体实施方式做详细的说明。需说明的是,本实用新型附图均采用简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本实用新型实施例的目的。
[0034]
请参阅图1和图2所示的可飞行无人船,其包括船体1、飞行机构2和驱动机构(图中未示出)。飞行机构2安装于所述船体1;驱动机构固定于所述船体1,并与所述飞行机构2传动连接,以能驱动所述飞行机构2从而提升该可飞行无人船,从而使该可飞行无人船形成水、空两栖作业功能。
[0035]
该可飞行无人船大大扩展了无人船的应用范围,港口码头、高岸基河道、宽绿化带河岸河道、泥沙坡岸河道、湿地水草环绕湖泊等场合不再会对无人船投放和回收造成制约影响,压缩了现场的人力成本。
[0036]
在飞行作业部分中,所述飞行机构2可采用直升机结构,并具体包括位于船体1上方的旋翼21,以及设置于船体1尾部的尾翼22。如图1所示,旋翼21为该无人船提供升力,通过尾梁23与所述船体1相连的所述尾翼22用于调整该无人船的飞行方向。
[0037]
在其他可选的实施方式中,所述飞行机构2亦可以采用多旋翼的无人机结构,例如,其可以包括均匀分布于所述船体1周向的多个旋翼,如通过操控四个呈矩阵分布的旋翼,使该无人船飞行。
[0038]
直升机结构和多旋翼的无人机结构的原理及功能部件布置皆为现有技术,在此不做赘述。
[0039]
在水体航行作业部分中,所述船体1可以包括平行设置的两个浮体11,以及连接于
两所述浮体11之间的设备舱12。当然船体1尾部下方还包括用于驱动该无人船航行的螺旋桨及方向舵等,在此不做赘述。此外,所述浮体11下方可连接有停放架13,适于在陆地停放。
[0040]
为便于开展水质监测、水文图像采集等功能,该无人船的所述设备舱12内可以设置有多参数水质仪3和/或adcp测流仪4。设备舱12外可设置有摄像机5。
[0041]
进一步的,所述驱动机构为油电混合动力机构。该无人船采用油电混合动力,自停泊点至入水过程及此过程的逆向操作过程中可采用柴油动力飞行,自入水至作业任务完成过程中采用锂电动力。采用油、电动力与水面、空中作业相互补充,避免了因能源故障或水面航行硬件故障造成的损失。
[0042]
相应地,所述设备舱12和/或所述浮体11内设置有与所述驱动机构电性连接的锂电池6及燃油箱7。
[0043]
本领域的技术人员可以对实用新型进行各种改动和变型而不脱离本实用新型的精神和范围。这样,倘若本实用新型的这些修改和变型属于本实用新型权利要求及其等同技术的范围之内,则本实用新型也意图包括这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1