基于仿生两栖型机器人的水下空气润滑辅助推进器的制作方法
[0001]
本实用新型涉及空气润滑式仿生两栖型机器人的摩擦阻力降低装置,尤其涉及一种基于仿生两栖型机器人的水下空气润滑辅助推进器。
背景技术:
[0002]
因现代作战的必要性,多模态仿生水陆两栖型机器人成为竞相研究的热点。与单一环境机器人不同,水陆两栖型机器人涉及陆地运动,水下运动以及跨介质运动,由此衍生出多种运动模态以及推进装置。仿生水陆两栖型机器人在水中运动时,会受到摩擦阻力、形状阻力、波漂阻尼等流体阻力,损耗了水陆两栖型机器人推进力。其中,形状阻力和波漂阻力可以通过调整外形来改善,而在低速下占主要部分的摩擦阻力则需要从其机理出发,寻求改进方法。
[0003]
因此,受启发于两栖生物通过释放羽毛中的绒毛网在水面收集的空气,从而在皮肤表面形成减阻层,实现跃水的空气润滑机理,我们提出了一种新的仿生两栖水下空气润滑辅助推进器。这种用微小气泡包裹自身的方式,极大的减少了阻力,使他们的速度可以达到正常游速的2-3倍。
[0004]
空气润滑在船舶中已有广泛的应用,部分研究表明,空气润滑系统可以节省5%-15%的燃料。其中,该系统主要分为五种模式,分别是气泡减阻、过渡空气层减阻、空气层减阻、部分空腔减阻以及多波部分空腔减阻。在气泡减阻中,气体通常通过槽、多孔材料或穿孔板注入边界层,但纯气泡减阻的持久性较差,因此需要在船体上开设较多注气位置。在空气层减阻中,气体通常通过水平板注入,此时发生从气泡流到空气层的转变,改善了纯气泡减阻的问题。在过渡空气层减阻中,既发生了气泡减阻,又发生了空气层减阻。在部分空腔减阻中,气体通常通过凹槽注入,从而在船体和外部水流之间形成一个空腔,气体被连续注入空腔内,以维持空腔内的气体,凹槽的长度接近空腔流向波长的一半。在多波部分空腔减阻中,凹槽的长度延伸到空腔表面波长的n倍。这些方法的本质是利用气体将固体表面与液体分离,并维持气体的稳定存在,从而发挥应有的减阻效果。
技术实现要素:
[0005]
(一)要解决的技术问题
[0006]
为了解决应用于两栖型机器人水下运动的仿生空气润滑难题,本实用新型提供了一种基于仿生两栖型机器人的水下空气润滑辅助推进器,以提高仿生两栖型机器人在水下和跨介质运动的速度。
[0007]
(二)技术方案
[0008]
为了达到上述目的,本实用新型采用的技术解决方案如下:
[0009]
一种基于仿生两栖型机器人的水下空气润滑辅助推进器,包括:一外壳1,具有流线型曲面,在所述外壳的外壁设置一环带区域,在所述环带区域与所述外壳的内壁之间包括一空腔17,且在所述环带区域表面开设多个斜孔16;以及一储气罐7,固设于所述外壳内,
并通过一气体传输通路连通于所述空腔17,使得所述储气罐7中的气体通过所述气体传输通路进入所述空腔17,并从所述多个斜孔16喷出。
[0010]
上述方案中,所述外壳的内壁设置多个空心接头13,所述空心接头的一端连通于所述空腔17,另一端连通于所述气体传输通路。
[0011]
上述方案中,所述空心接头13的个数为3,间隔120度均匀分布于所述外壳的内壁;或者所述空心接头13的个数为4,间隔90度均匀分布于所述外壳的内壁。
[0012]
上述方案中,所述外壳的内壁还包括一带有凹槽的环形凸台14和多个带通孔的凸台15,其中:所述环形凸台14的凹槽内放置有环形垫圈6,对所述储气罐7进行辅助支撑;所述凸台15的通孔与所述储气罐7底端设置的多个螺纹盲孔19通过螺栓进行连接,对所述储气罐7的底端进行固定。
[0013]
上述方案中,所述储气罐7包括:前螺纹通孔18,设置于所述储气罐7的前端,所述储气罐7中的气体通过所述前螺纹通孔18输出至所述气体传输通路;后螺纹通孔20,设置于所述储气罐7的底端,外部压缩气体通过所述后螺纹通孔20输入至所述储气罐7;多个螺纹盲孔19,设置于所述储气罐7的底端,与所述凸台15的通孔通过螺栓进行连接,对所述储气罐7的底端进行固定。
[0014]
上述方案中,所述凸台15的个数和所述螺纹盲孔19的个数相同,均大于等于3。
[0015]
上述方案中,所述后螺纹通孔20上还设置一单向阀2,所述单向阀2与所述后螺纹通孔20通过螺纹连接,外部压缩气体依次通过所述单向阀2和所述后螺纹通孔20进入所述储气罐7,防止所述储气罐7的气体自所述后螺纹通孔20和所述单向阀2反向输出。
[0016]
上述方案中,所述气体传输通路沿气体传输方向依次包括一转接头8、一第一pu管9、一电磁阀10、一第二pu管11、一多通接头12、多个pu管5、多个单向节流阀4和多个pu管接口3,其中:所述转接头8与所述储气罐7的前螺纹通孔18通过螺纹连接,用于输出所述储气罐7中的压缩气体;所述第一pu管9的一端与所述转接头8通过快拧连接,所述第一pu管9的另一端与所述电磁阀10的进气口通过快拧连接;所述电磁阀10的出气口与所述第二pu管11的一端通过快拧连接,所述第二pu管11的另一端与所述多通接头12的一个端口通过快拧连接;所述多通接头12的其他端口分别与多个pu管5中的一个pu管的一端通过快拧连接,多个pu管5中的一个pu管的另一端分别与多个单向节流阀4中的一个单向节流阀通过快拧连接;多个单向节流阀4中的一个单向节流阀同时与多个pu管接口3中的一个pu管接口通过快拧连接;所述外壳的内壁设置的多个空心接头13分别插入于多个pu管接口3中,使得多个pu管接口3中的气体经过空心接头13进入所述空腔17。
[0017]
上述方案中,所述多通接头12为四通接头,所述多个pu管5、多个单向节流阀4和多个pu管接口3均为三个,其中:该四通接头的一个端口连通于所述第二pu管11,另外三个端口分别连通于所述多个pu管5中的一个pu管,所述多个pu管5中的每个pu管分别连通于所述多个单向节流阀4中的一个单向节流阀,所述多个单向节流阀4中的每个单向节流阀同时连通于所述多个pu管接口3中的一个pu管接口。
[0018]
上述方案中,所述单向节流阀4一端连接于多个pu管5中的一个pu管,另一端连接于多个pu管接口3中的一个pu管接口,用于控制气体流量以及防止水倒流。
[0019]
(三)有益效果
[0020]
本实用新型提供的基于仿生两栖型机器人的水下空气润滑辅助推进器,将空气润
滑技术引入两栖型机器人的水下运动模态,通过喷出的压缩空气来降低两栖型机器人身体与周围水流之间的摩擦阻力,从而实现两栖型机器人身体与周围水流之间的固液分离,提高了仿生两栖型机器人在水下和跨介质运动的速度。
附图说明
[0021]
本实用新型的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
[0022]
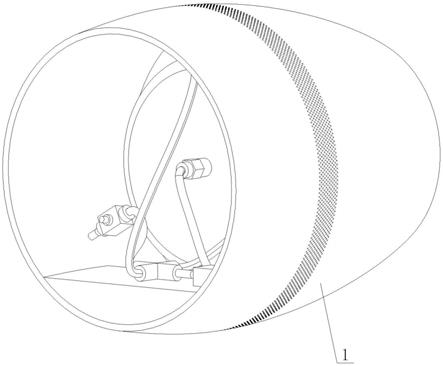
图1是依照本实用新型实施例的基于仿生两栖型机器人的水下空气润滑辅助推进器在侧前方视角下的结构示意图;
[0023]
图2是依照本实用新型实施例的基于仿生两栖型机器人的水下空气润滑辅助推进器在侧后方视角下的结构示意图;
[0024]
图3为图1中去掉外壳后储气罐和气体传输通路的结构示意图;
[0025]
图4为图1中外壳的结构示意图;
[0026]
图5为图1中外壳的剖面图;
[0027]
图6为图1中储气罐的结构示意图。
[0028]
附图标记:1为外壳,2为单向阀、3为pu管接口、4为单向节流阀、5为pu管、6为环形垫圈、7为耐压1mpa的储气罐、8为转接头、9为第一pu管、10为电磁阀、11为第二pu管、12为多通接头、13为空心接头、14为带有凹槽的环形凸台、15为带通孔的凸台、16为斜孔、17为空腔、18为前螺纹通孔、19为螺纹盲孔、20为后螺纹通孔。
具体实施方式
[0029]
为使本实用新型的目的、技术方案和优点更加清楚明白,以下结合具体实施例,并参照附图,对本实用新型进一步详细说明。
[0030]
下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本实用新型,而不能理解为对本实用新型的限制。
[0031]
在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个所述特征。在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
[0032]
在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个
元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
[0033]
在本实用新型的描述中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
[0034]
下文的公开提供了许多不同的实施例或例子用来实现本实用新型的不同结构。为了简化本实用新型的公开,下文中对特定例子的部件和设置进行描述。当然,它们仅仅为示例,并且目的不在于限制本实用新型。此外,本实用新型可以在不同例子中重复参考数字和/或参考字母,这种重复是为了简化和清楚的目的,其本身不指示所讨论各种实施例和/或设置之间的关系。此外,本实用新型提供了的各种特定的工艺和材料的例子,但是本领域普通技术人员可以意识到其他工艺的应用和/或其他材料的使用。
[0035]
请参照图1-图6所示,本实用新型提供的基于仿生两栖型机器人的水下空气润滑辅助推进器,包括外壳1和储气罐7,其中,外壳1具有流线型曲面,在所述外壳的外壁设置一环带区域,在所述环带区域与所述外壳的内壁之间包括一空腔17,且在所述环带区域表面开设多个斜孔16;储气罐7固设于所述外壳内,并通过一气体传输通路连通于所述空腔17,使得所述储气罐7中的气体通过所述气体传输通路进入所述空腔17,并从所述多个斜孔16喷出。
[0036]
如图4和图5所示,所述外壳的内壁设置多个空心接头13,所述空心接头的一端连通于所述空腔17,另一端连通于所述气体传输通路。所述空心接头13的个数可以视具体情况而定,一般情况下,为了使从所述多个斜孔16喷出的气体比较均匀,空心接头13的个数可以为3个或4个,在空心接头13的个数为3时,3个空心接头13间隔120度均匀分布于所述外壳的内壁;在空心接头13的个数为4时,4个空心接头13间隔90度均匀分布于所述外壳的内壁。
[0037]
如图4和图3所示,所述外壳的内壁还包括一带有凹槽的环形凸台14和多个带通孔的凸台15,其中:所述环形凸台14的凹槽内放置有环形垫圈6,对所述储气罐7进行辅助支撑;所述凸台15的通孔与所述储气罐7底端设置的多个螺纹盲孔19通过螺栓进行连接,对所述储气罐7的底端进行固定。
[0038]
如图4至图6所示,所述储气罐7包括前螺纹通孔18、后螺纹通孔20和多个螺纹盲孔19,其中:前螺纹通孔18设置于所述储气罐7的前端,所述储气罐7中的气体通过所述前螺纹通孔18输出至所述气体传输通路;后螺纹通孔20设置于所述储气罐7的底端,外部压缩气体通过所述后螺纹通孔20输入至所述储气罐7;多个螺纹盲孔19设置于所述储气罐7的底端,与所述凸台15的通孔通过螺栓进行连接,对所述储气罐7的底端进行固定。
[0039]
在实际应用中,所述凸台15的个数和所述螺纹盲孔19的个数相同,为使储气罐7能够牢固固定于外壳1,所述凸台15的个数和所述螺纹盲孔19的个数均大于等于3,一般为4个。
[0040]
如图2所示,所述后螺纹通孔20上还设置一单向阀2,所述单向阀2与所述后螺纹通孔20通过螺纹连接,外部压缩气体依次通过所述单向阀2和所述后螺纹通孔20进入所述储
气罐7,防止所述储气罐7的气体自所述后螺纹通孔20和所述单向阀2反向输出。
[0041]
如图1和图3所示,所述气体传输通路沿气体传输方向依次包括一转接头8、一第一pu管9、一电磁阀10、一第二pu管11、一多通接头12、多个pu管5、多个单向节流阀4和多个pu管接口3,其中:所述转接头8与所述储气罐7的前螺纹通孔18通过螺纹连接,用于输出所述储气罐7中的压缩气体;所述第一pu管9的一端与所述转接头8通过快拧连接,所述第一pu管9的另一端与所述电磁阀10的进气口通过快拧连接;所述电磁阀10的出气口与所述第二pu管11的一端通过快拧连接,所述第二pu管11的另一端与所述多通接头12的一个端口通过快拧连接;所述多通接头12的其他端口分别与多个pu管5中的一个pu管的一端通过快拧连接,多个pu管5中的一个pu管的另一端分别与多个单向节流阀4中的一个单向节流阀通过快拧连接;多个单向节流阀4中的一个单向节流阀同时与多个pu管接口3中的一个pu管接口通过快拧连接;所述外壳的内壁设置的多个空心接头13分别插入于多个pu管接口3中,使得多个pu管接口3中的气体经过空心接头13进入所述空腔17。
[0042]
在本实用新型的一个实施例中,所述多通接头12为四通接头,所述多个pu管5、多个单向节流阀4和多个pu管接口3均为三个,其中:该四通接头的一个端口连通于所述第二pu管11,另外三个端口分别连通于所述多个pu管5中的一个pu管,所述多个pu管5中的每个pu管分别连通于所述多个单向节流阀4中的一个单向节流阀,所述多个单向节流阀4中的每个单向节流阀同时连通于所述多个pu管接口3中的一个pu管接口。
[0043]
如图3所示,所述单向节流阀4一端连接于多个pu管5中的一个pu管,另一端连接于多个pu管接口3中的一个pu管接口,用于控制气体流量以及防止水倒流。
[0044]
基于图1-图6本实用新型提供的基于仿生两栖型机器人的水下空气润滑辅助推进器,仿生两栖型机器人的水下空气润滑辅助推进器是向身体周围喷出空气,以在身体周围产生稳定气泡,来降低与周围水流之间的摩擦阻力,从而提高速度的装置。具体为压缩空气预先通过空压机打入储气罐7中,然后利用电磁阀10开启气体传输通路,从而控制气体通过气体传输通路,最后从两栖型机器人身体表面1的多个斜孔16喷出,通过喷出的压缩空气来降低两栖型机器人身体与周围水流之间的摩擦阻力,从而实现两栖型机器人身体与周围水流之间的固液分离,提高了仿生两栖型机器人在水下和跨介质运动的速度。
[0045]
实施例
[0046]
请再次参照图1-图6所示,本实用新型实施例提供的这种基于气泡减阻的仿生两栖型机器人的水下空气润滑辅助推进器,包括外壳1内的单向阀2、三个pu管接口3、三个单向节流阀4、三个pu管5、环形垫圈6、耐压1mpa的储气罐7、转接头8、第一pu管9、电磁阀10、第二pu管11以及四通接头12。
[0047]
所述的外壳1包括流线型曲面、三个空心接头13、一个带有凹槽的环形凸台14、四个带通孔的凸台15、多个斜孔16以及空腔17。三个空心接头13分别插入三个pu管3,而三个pu管3与三个用于控制气体流量以及防止水倒流的单向节流阀4快拧连接,凹槽14中放入环形垫圈6,用于储气罐的辅助支撑,四个带通孔的凸台15与储气罐7对应的四个螺纹盲孔19通过螺栓连接,用于储气罐的底端固定,多个斜孔16用于释放气泡,空腔17用于缓冲空心接头13释放的气体。
[0048]
所述的储气罐7包括前螺纹通孔18,后螺纹通孔20和四个螺纹盲孔19,前螺纹通孔18与转换头8通过螺纹连接,用于输出压缩气体,四个螺纹盲孔19与外壳四个带通孔的凸台
15通过螺栓连接以固定储气罐,后螺纹通孔20与单向阀2通过螺纹连接,用于输入压缩气体。外部压缩气体依次通过所述单向阀2和所述后螺纹通孔20进入所述储气罐7,防止所述储气罐7的气体自所述后螺纹通孔20和所述单向阀2反向输出。
[0049]
所述电磁阀10的进气口与第一pu管9通过快拧连接,第一pu管9与转换头8通过快拧连接;所述电磁阀10的出气口与第二pu管11通过快拧连接,第二pu管11与四通接头12通过快拧连接,四通接头12与三个pu管5通过快拧连接,三个pu管5与三个单向节流阀4通过快拧连接,用于控制气体的通断。
[0050]
根据本实用新型的形态,仿生两栖型机器人的水下空气润滑辅助推进器是向身体周围喷出空气,以在身体周围产生稳定气泡,来降低与周围水流之间的摩擦阻力,从而提高速度的装置。具体为压缩空气预先通过空压机打入储气罐7中,然后利用电磁阀10开启通路,从而控制气体通过气体传输通路,最后从仿生两栖型机器人身体表面喷出。
[0051]
在本说明书的描述中,参考术语“一个实施例”、“某些实施例”、“示意性实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合所述实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
[0052]
以上所述的具体实施例,对本实用新型的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本实用新型的具体实施例而己,并不用于限制本实用新型,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1