人员落水定位报警及船体自动驾停系统及方法与流程
1.本发明涉及落水报警及船体驾停系统技术领域,具体为人员落水定位报警及船体自动驾停系统及方法。
背景技术:
2.船舶是一种主要在地理水中运行的人造交通工具,内部主要包括容纳空间、支撑结构和排水结构,具有利用外在或自带能源的推进系统。外型一般是利于克服流体阻力的流线性包络,材料随着科技进步不断更新,早期为木、竹、麻等自然材料,近代多是钢材以及铝、玻璃纤维、亚克力和各种复合材料,在船舶行驶过程中容易出现人员落水的情况,需要用到人员落水定位报警系统。
3.市场上的人员落水定位报警系统无法进行系统运行前的分析与判断,无法确保系统运行的有效性,容易出现人员落水无法第一时间报警的缺点。
技术实现要素:
4.本发明的目的在于提供人员落水定位报警及船体自动驾停系统及方法,以解决上述背景技术中提出的人员落水定位报警系统无法进行系统运行前的分析与判断,无法确保系统运行的有效性,容易出现人员落水无法第一时间报警的问题。
5.为实现上述目的,本发明提供如下技术方案:人员落水定位报警及船体自动驾停系统及方法,包括:
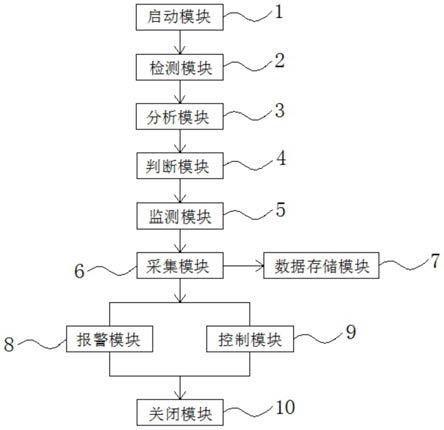
6.启动模块,所述启动模块的输出端电性连接有检测模块,所述检测模块的输出端电性连接有分析模块;
7.判断模块,其电性连接于所述分析模块的输出端,所述判断模块的输出端电性连接有监测模块;
8.采集模块,其电性连接于所述监测模块的输出端,所述采集模块的输出端电性连接有数据存储模块、报警模块和控制模块;
9.关闭模块,其电性连接于所述报警模块和控制模块的输出端。
10.优选的,所述检测模块还包括:
11.线路检测单元,其电性连接于所述检测模块的输出端,所述检测模块的输出端还连接有传感器检测单元、扬声器检测单元、雷达检测单元和影像检测单元。
12.优选的,所述线路检测单元、传感器检测单元、扬声器检测单元、雷达检测单元和影像检测单元与检测模块之间为电性并联连接。
13.优选的,所述采集模块还包括:
14.图片采集单元,其电性连接于所述采集模块的输出端,所述采集模块的输出端还连接有声音采集单元、位置采集单元、气压采集单元和风力采集单元。
15.优选的,所述图片采集单元、声音采集单元、位置采集单元、气压采集单元和风力采集单元与采集模块之间为电性并联连接。
16.优选的,所述报警模块还包括:
17.局部报警单元,其电性连接于所述报警模块的输出端,所述报警模块的输出端还连接有区域报警单元。
18.优选的,所述局部报警单元和区域报警单元与报警模块之间为电性并联连接。
19.优选的,所述控制模块还包括:
20.动力控制单元,其电性连接于所述控制模块的输出端,所述控制模块的输出端还连接有锁定单元。
21.优选的,所述动力控制单元和锁定单元与控制模块之间为电性并联连接。
22.优选的,所述人员落水定位报警及船体自动驾停方法包括以下具体步骤:
23.s1、检测系统运行是否正常
24.通过启动模块启动系统,然后通过检测模块分别对线路、传感器、扬声器、雷达及热成像相机进行通电检测,确保线路、传感器、扬声器、雷达和热成像相机处于正常工作状态,通过分析模块和判断模块确定系统是否可以正常运行;
25.s2、检测船体周边
26.开启监测模块与采集模块,对船体的周边环境进行实时的监测,当发生人员落水时,通过图片采集单元、声音采集单元和位置采集单元可以对落水人员的状态进行监测,以便于实施营救,同时配合气压采集单元和风力采集单元可以对营救环境进行监测,确保营救的安全性与有效性;
27.s3、自动报警与自动驾停
28.当监测到有人员落水时,报警模块自动开始报警,并通过局部报警单元和区域报警单元实现船体扬声器的报警,以及区域化海域通讯报警,请求附近船只及海警进行营救,提升营救率,同时船体在动力控制单元的控制下自动驾停,并配合锁定单元,对船体动力进行锁定,避免营救时船体出现移动的情况,完成营救工作后通过关闭模块取消报警。
29.本发明提供了人员落水定位报警及船体自动驾停系统及方法,具备以下有益效果:该人员落水定位报警及船体自动驾停系统及方法,可以对船体的周边进行实时监测,确保人员落水后第一时间报警,可以对落水人员的状况及环境进行监测,为营救工作提供保障,同时可以自动扩大报警范围,提升落水人员的营救率;
30.1、本发明通过检测模块的设置,使得线路检测单元、传感器检测单元、扬声器检测单元、雷达检测单元和影像检测单元可以分别,对线路、传感器、扬声器、雷达和热成像相机进行状态检测,确保系统每次工作的正常,避免出现线路和其他故障导致人员落水后无法第一时间进行报警,错过最佳营救时间段的情况。
31.2、本发明通过采集模块可以对船体周边的环境及落水人员的状态进行监测,从而保证对落水人员营救的有效性,避免盲目营救增加营救难度的情况,位置采集单元与雷达相连接这样可以准确知道落水人员位于船体的哪一侧,减少搜查时间,增加营救时间,提升落水人员的生还率,气压采集单元和风力采集单元可以对船体周边的环境进行监测,以实施有效的营救。
32.3、本发明通过报警模块的局部报警单元和区域报警单元,可以实现船体扬声器的报警,以及区域化海域通讯报警,请求附近船只及海警进行营救,提升营救率,局部报警单元和区域报警单元均为单独工作模式,有效避免通讯故障的情况,保证报警的有效性。
33.4、本发明通过控制模块,可以实现对船体的自动驾停与安全锁定,船体在动力控制单元的控制下自动驾停,并配合锁定单元,对船体动力进行锁定,避免营救过程中触碰开关导致船体发动驶离的危险情况,为营救工作提供保障,并且只有手动才可以取消动力控制单元和锁定单元对船体的控制效果,进一步保证营救过程中的安全性。
附图说明
34.图1为本发明人员落水定位报警及船体自动驾停系统及方法的整体流程结构示意图;
35.图2为本发明人员落水定位报警及船体自动驾停系统及方法的检测模块流程结构示意图;
36.图3为本发明人员落水定位报警及船体自动驾停系统及方法的采集模块流程结构示意图;
37.图4为本发明人员落水定位报警及船体自动驾停系统及方法的报警模块流程结构示意图;
38.图5为本发明人员落水定位报警及船体自动驾停系统及方法的控制模块流程结构示意图。
39.图中:1、启动模块;2、检测模块;201、线路检测单元;202、传感器检测单元;203、扬声器检测单元;204、雷达检测单元;205、影像检测单元;3、分析模块;4、判断模块;5、监测模块;6、采集模块;601、图片采集单元;602、声音采集单元;603、位置采集单元;604、气压采集单元;605、风力采集单元;7、数据存储模块;8、报警模块;801、局部报警单元;802、区域报警单元;9、控制模块;901、动力控制单元;902、锁定单元;10、关闭模块。
具体实施方式
40.请参阅图1
‑
2,人员落水定位报警及船体自动驾停系统及方法,包括:启动模块1,启动模块1的输出端电性连接有检测模块2,检测模块2的输出端电性连接有分析模块3;检测模块2还包括:线路检测单元201,其电性连接于检测模块2的输出端,检测模块2的输出端还连接有传感器检测单元202、扬声器检测单元203、雷达检测单元204和影像检测单元205,线路检测单元201、传感器检测单元202、扬声器检测单元203、雷达检测单元204和影像检测单元205与检测模块2之间为电性并联连接,检测模块2的设置,使得线路检测单元201、传感器检测单元202、扬声器检测单元203、雷达检测单元204和影像检测单元205可以分别,对线路、传感器、扬声器、雷达和热成像相机进行状态检测,确保系统每次工作的正常,避免出现线路和其他故障导致人员落水后无法第一时间进行报警,错过最佳营救时间段的情况;
41.请参阅图3,人员落水定位报警及船体自动驾停系统及方法,判断模块4,其电性连接于分析模块3的输出端,判断模块4的输出端电性连接有监测模块5;采集模块6,其电性连接于监测模块5的输出端,采集模块6还包括:图片采集单元601,其电性连接于采集模块6的输出端,采集模块6的输出端还连接有声音采集单元602、位置采集单元603、气压采集单元604和风力采集单元605;图片采集单元601、声音采集单元602、位置采集单元603、气压采集单元604和风力采集单元605与采集模块6之间为电性并联连接,采集模块6可以对船体周边的环境及落水人员的状态进行监测,从而保证对落水人员营救的有效性,避免盲目营救增
加营救难度的情况,位置采集单元603与雷达相连接这样可以准确知道落水人员位于船体的哪一侧,减少搜查时间,增加营救时间,提升落水人员的生还率,气压采集单元604和风力采集单元605可以对船体周边的环境进行监测,以实施有效的营救;
42.请参阅图4,人员落水定位报警及船体自动驾停系统及方法,采集模块6的输出端电性连接有数据存储模块7、报警模块8和控制模块9;关闭模块10,其电性连接于报警模块8和控制模块9的输出端,报警模块8还包括:局部报警单元801,其电性连接于报警模块8的输出端,报警模块8的输出端还连接有区域报警单元802,局部报警单元801和区域报警单元802与报警模块8之间为电性并联连接,报警模块8的局部报警单元801和区域报警单元802,可以实现船体扬声器的报警,以及区域化海域通讯报警,请求附近船只及海警进行营救,提升营救率,局部报警单元801和区域报警单元802均为单独工作模式,有效避免通讯故障的情况,保证报警的有效性;
43.请参阅图5,人员落水定位报警及船体自动驾停系统及方法,控制模块9还包括:动力控制单元901,其电性连接于控制模块9的输出端,控制模块9的输出端还连接有锁定单元902;动力控制单元901和锁定单元902与控制模块9之间为电性并联连接,控制模块9,可以实现对船体的自动驾停与安全锁定,船体在动力控制单元901的控制下自动驾停,并配合锁定单元902,对船体动力进行锁定,避免营救过程中触碰开关导致船体发动驶离的危险情况,为营救工作提供保障,并且只有手动才可以取消动力控制单元901和锁定单元902对船体的控制效果,进一步保证营救过程中的安全性。
44.人员落水定位报警及船体自动驾停方法包括以下具体步骤:
45.s1、检测系统运行是否正常
46.通过启动模块1启动系统,然后通过检测模块2分别对线路、传感器、扬声器、雷达及热成像相机进行通电检测,确保线路、传感器、扬声器、雷达和热成像相机处于正常工作状态,通过分析模块3和判断模块4确定系统是否可以正常运行;
47.s2、检测船体周边
48.开启监测模块5与采集模块6,对船体的周边环境进行实时的监测,当发生人员落水时,通过图片采集单元601、声音采集单元602和位置采集单元603可以对落水人员的状态进行监测,以便于实施营救,同时配合气压采集单元604和风力采集单元605可以对营救环境进行监测,确保营救的安全性与有效性;
49.s3、自动报警与自动驾停
50.当监测到有人员落水时,报警模块8自动开始报警,并通过局部报警单元801和区域报警单元802实现船体扬声器的报警,以及区域化海域通讯报警,请求附近船只及海警进行营救,提升营救率,同时船体在动力控制单元901的控制下自动驾停,并配合锁定单元902,对船体动力进行锁定,避免营救时船体出现移动的情况,完成营救工作后通过关闭模块10取消报警
51.综上,该人员落水定位报警及船体自动驾停系统及方法,使用时,首先通过开启监测模块5与采集模块6,对船体的周边环境进行实时的监测,当发生人员落水时,通过图片采集单元601、声音采集单元602和位置采集单元603可以对落水人员的状态进行监测,以便于实施营救,同时配合气压采集单元604和风力采集单元605可以对营救环境进行监测,确保营救的安全性与有效性,然后开启监测模块5与采集模块6,对船体的周边环境进行实时的
监测,当发生人员落水时,通过图片采集单元601、声音采集单元602和位置采集单元603可以对落水人员的状态进行监测,以便于实施营救,同时配合气压采集单元604和风力采集单元605可以对营救环境进行监测,确保营救的安全性与有效性,当监测到有人员落水时,报警模块8自动开始报警,并通过局部报警单元801和区域报警单元802实现船体扬声器的报警,以及区域化海域通讯报警,请求附近船只及海警进行营救,提升营救率,同时船体在动力控制单元901的控制下自动驾停,并配合锁定单元902,对船体动力进行锁定,避免营救时船体出现移动的情况,完成营救工作后通过关闭模块10取消报警。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1