一种自主推进鱼类仿生机器鱼的姿态调节装置
1.本发明涉及仿生机器鱼技术领域,特别涉及一种自主推进鱼类仿生机器鱼的姿态调节装置。
背景技术:
2.为了探索深水领域,人们把目光越来越多的投向海洋工程领域的开发,这也促进了航潜器的发展。但是海洋中不确定因素和难以预测的危险(水波扰动,洋流,高压,低可见度等)制约着科研工作人员和工程师的工作。
3.鱼作为在水中生活的最古老的脊椎生物,经过漫长时间的进化与自然的选择,他们可以在水中灵活和迅速的游动。鱼类可以在水中迅速的进行姿态的调整,包括上升、下沉、艏倾、艉倾。于是研究者们想通过对鱼类的仿生研究,来学习鱼类的高推进效率和灵活的运动机制躯体。近年来,也有各式各样的仿生机器鱼被设计制造出来,研究人员对放生机器鱼的研究进入了新的时期。
4.传统机器鱼靠单电机驱动尾部往复摆动,但是这种方法使得电机的利用效率低,没有起到良好的仿生效果。现有机器鱼的姿态调节系统大多不可靠,姿态调节过程响应缓慢,灵活度差,控制上比较困难,与仿生鱼类的目标相比有较大差距。
技术实现要素:
5.本发明旨在至少在一定程度上解决现有技术中的上述技术问题之一。为此,本发明实施例提供一种主推进鱼类仿生机器鱼的姿态调节装置,迅速调整机器鱼的水下姿态。
6.根据本发明实施例的自主推进鱼类仿生机器鱼的姿态调节装置,包括鱼体,其中,所述鱼体包括壳体;重心调节组件,所述重心调节组件位于所述壳体内,以调节所述鱼体重心,所述重心调节组件包括至少一个配重块以及驱动所述配重块头尾方向移动的丝杆滑块机构;以及吸排水系统,所述吸排水系统位于所述壳体内,以调节所述鱼体的重量,所述吸排水系统包括压水舱以及用于控制所述压水舱内部水位的控水组件。
7.在可选或优选的实施例中,所述丝杆滑块机构包括固定在所述壳体内的固定座、安装在所述固定座的滑轨、沿所述滑轨移动的移动块、与所述移动块连接的丝杆以及驱动所述丝杆转动的步进电机,所述配重块固定在所述移动块上,所述移动块设置有与所述滑轨配合的滑块,以沿所述滑轨滑动,所述移动块具有与所述丝杆配合的螺孔,以使所述丝杆转动后驱使所述移动块移动,从而使所述配重块在所述鱼体内的位置发生变化。
8.在可选或优选的实施例中,所述移动块安装有配重支架,所述配重块安装在所述配重支架上。
9.在可选或优选的实施例中,所述固定座设置有第一限位开关和第二限位开关,所述配重支架安装有与所述第一限位开关配合的第一限位挡板以及与所述第二限位开关配合的第二限位挡板,以对所述移动块的行程进行控制。
10.在可选或优选的实施例中,所述控水组件包括设置有吸水管和出水管的水泵,所
述水泵的出水管与所述压水舱连接,以向所述压水舱进水,所述压水舱连接有排水管,以排出所述压水舱内的水,所述排水管设置有单向阀。
11.在可选或优选的实施例中,所述压水舱包括后舱体以及与所述后舱体密封连接的前端盖,所述前端盖与所述后舱体连接后成型有位于所述压水舱内部的腔室。
12.在可选或优选的实施例中,所述前端盖设置有进水接口和排水接口,所述排水管与所述排水接口连接,所述水泵的出水管与所述进水接口连接。
13.在可选或优选的实施例中,所述壳体包括依次连接的鱼头部分、鱼身部分以及鱼尾部分,所述重心调节组件位于所述鱼头部分内,所述鱼头部分和所述鱼身部分之间设置有鱼头底座,所述水泵安装在所述鱼头底座头部一端,所述鱼身部分包括压水舱以及与所述压水舱连接的第二鱼身壳体。
14.在可选或优选的实施例中,所述鱼头底座设置有吸水接头和出水接头,所述水泵的吸水管穿过所述吸水接头,以与水相接触,所述水泵的出水管穿过所述出水接头,以连接所述进水接口。
15.基于上述技术方案,本发明实施例至少具有以下有益效果:上述技术方案,通过设计重心调节组件,通过控制配重块在鱼体内的位置变化,可以调节鱼体重心,从而改变机器鱼俯仰姿态,并且设计吸排水系统,通过控制压水舱内的水位,可以迅速实现调节机器鱼的沉浮状态;重心调节组件和吸排水系统相结合的方式快速改变鱼体的重量和重心,可以迅速实现机器鱼的俯仰姿态调节和沉浮状态调节,使得机器鱼可以在水下高效灵敏进行下潜上浮的运动功能。
附图说明
16.下面结合附图和实施例对本发明进一步地说明;
17.图1是本发明实施例的结构示意图;
18.图2是本发明实施例的分解图;
19.图3是本发明中重心调节组件和吸排水系统的结构示意图;
20.图4是本发明实施例中重心调节组件的透视图;
21.图5是本发明实施例中鱼头底座的透视图;
22.图6是本发明实施例中吸排水系统的透视图。
具体实施方式
23.本部分将详细描述本发明的具体实施例,本发明之较佳实施例在附图中示出,附图的作用在于用图形补充说明书文字部分的描述,使人能够直观地、形象地理解本发明的每个技术特征和整体技术方案,但其不能理解为对本发明保护范围的限制。
24.在本发明的描述中,需要理解的是,涉及到方位描述,例如上、下、前、后、左、右等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
25.在本发明的描述中,若干的含义是一个或者多个,多个的含义是两个以上,大于、小于、超过等理解为不包括本数,以上、以下、以内等理解为包括本数。如果有描述到第一、
第二只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
26.本发明的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本发明中的具体含义。
27.参照图1至图6,一种自主推进鱼类仿生机器鱼的姿态调节装置,包括鱼体,其中,鱼体包括壳体100、重心调节组件200以及吸排水系统300。具体的,如图1所示,壳体100包括依次连接的鱼头部分110、鱼身部分120以及鱼尾部分130,鱼尾部分130为柔性鱼尾。
28.重心调节组件200位于壳体100内,以调节鱼体重心,具体而言,重心调节组件200位于鱼头部分110内,参照图2,鱼头部分110包括依次连接的鱼头第一外壳111、鱼头第二外壳112以及鱼头第三外壳113,鱼头第二外壳112头部一侧内装有摄像模块411,后接入鱼头第一外壳112,本实施例中,重心调节组件200安装在鱼头第三外壳113,鱼头第三外壳113内设置有供重心调节组件200安装的若干根横梁。
29.本实施例中,重心调节组件200包括至少一个配重块218以及驱动配重块218头尾方向移动的丝杆滑块机构,通过控制配重块218在鱼体内的位置变化,可以调节鱼体重心,从而改变机器鱼俯仰姿态。
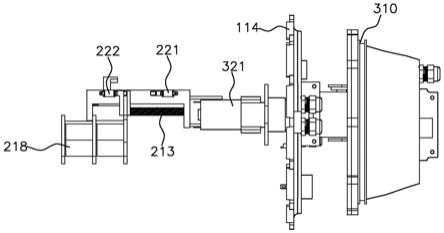
30.具体而言,丝杆滑块机构包括固定在壳体100内的固定座211、安装在固定座211的滑轨214、沿滑轨214移动的移动块216、与移动块216连接的丝杆213以及驱动丝杆213转动的步进电机212,配重块218固定在移动块216上,移动块216设置有与滑轨214配合的滑块215,以沿滑轨214滑动,移动块216具有与丝杆213配合的螺孔,以使丝杆213转动后驱使移动块216移动,从而使配重块218在鱼体内的位置发生变化。另外,移动块216安装有配重支架217,配重块218安装在配重支架217上。
31.优选的,为了监测移动块216在丝杆213上不会过度运动,避免运动过程中和固定座两壁面相撞。固定座211设置有第一限位开关221和第二限位开关222,配重支架217安装有与第一限位开关221配合的第一限位挡板223以及与第二限位开关222配合的第二限位挡板224,以对移动块216的行程进行控制。
32.吸排水系统300位于壳体100内,以调节鱼体的重量,吸排水系统300包括压水舱310以及用于控制压水舱310内部水位的控水组件,通过控制压水舱310内的水位,可以迅速实现调节机器鱼的沉浮状态。
33.在鱼头第三外壳113内,还设置有电源模块412和集成电路控制模块413,电源模块412为各构件提供电源,集成电路控制模块413用于控制各部件的动作。
34.在吸排水系统300中,具体而言,控水组件包括设置有吸水管和出水管的水泵321,水泵321的出水管与压水舱310连接,以向压水舱310进水,压水舱310连接有排水管,以排出压水舱310内的水,排水管设置有单向阀。如图6所示,压水舱310包括后舱体311以及与后舱体311密封连接的前端盖312,前端盖312与后舱体311连接后成型有位于压水舱310内部的腔室,通过控制腔室的水位,可以改变鱼体的重量。前端盖312与后舱体311通过螺钉相连接,它们接触面之间开有可以放置o型密封圈的沟槽。
35.另外,前端盖312设置有进水接口333和排水接口334,排水管与排水接口334连接,水泵321的出水管与进水接口333连接。鱼头部分110和鱼身部分120之间设置有鱼头底座
114,水泵321安装在鱼头底座114头部一端,鱼身部分120包括压水舱310以及与压水舱310连接的第二鱼身壳体122。鱼头底座114设置有多个接入孔,包括程序线接入孔、电源模块充电孔、电源开关孔等,此不作详细赘述。
36.如图5所示,鱼头底座114设置有吸水接头331和出水接头332,水泵321的吸水管穿过吸水接头331,以与水相接触,水泵321的出水管穿过出水接头332,以连接进水接口333。
37.可以理解的是,水泵321的吸水管从吸水接头331穿出,与水相接触,水泵321通过这一端进行吸水;水泵321的出水管从出水接头332穿出然后接入进水接口333,与压水舱310内部连接,水泵321通过这一端将水运送到压水舱310内部的腔室;排水接口334接有装有单向阀的排水管,通过这根管道可以将压水舱310的舱体内部的水排出。吸排水系统300通过水泵321对压水舱310进行吸水和排水,控制压水舱310内的水位,而改变机器鱼的重量,可以迅速实现调节机器鱼的沉浮状态。
38.本发明实施例自主推进鱼类仿生机器鱼的姿态调节装置,采用重心调节组件200和吸排水系统300相结合的方式,快速改变鱼体的重量和重心,可以迅速实现机器鱼的俯仰姿态调节和沉浮状态调节,使得机器鱼可以在水下高效灵敏进行下潜上浮的运动功能。通过此种姿态调节装置,与仿生机器鱼的鱼尾部分浩如烟海摆尾运动相结合,可以实现控制机器鱼高效机动的水下复杂的三维运动。
39.上面结合附图对本发明实施例作了详细说明,但是本发明不限于上述实施例,在所述技术领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下作出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1