一种潜水器用可伸缩式水平稳定翼的制作方法
1.本发明涉及潜水器技术领域,尤其是一种潜水器用可伸缩式水平稳定翼。
背景技术:
2.为确保潜水器水下航行直航稳定性,潜水器通常均需配备垂直稳定翼和水平稳定翼。设置垂直稳定翼的作用是改善水平面稳定性,提高直航时的航向保持能力;设置水平稳定翼的作用是改善垂直面稳定性,提高潜水器抗俯仰能力。因此,合理的稳定翼设计是潜水器航行经济性和安全性的重要保证。
3.现有技术中,俄罗斯的“mir1”及“mir2”载人潜水器采用采用t形稳定翼布局,日本的“深海6500”号载人潜水器稳定翼是十形布置,中国的“蛟龙号”载人潜水器采用了x形稳定翼布局,以上潜水器采用的均是固定稳定翼设计,在满足水下稳定性的同时,没有很好的兼顾潜浮阻力性能。为改善潜浮运动过程中的垂向阻力性能,法国的“鹦鹉螺”号载人潜水器未设置水平稳定翼,仅保留垂直固定稳定翼;深海勇士号载人潜水器采用了固定垂直翼及可回转稳定翼的设计。“鹦鹉螺”号的单垂直翼设计可以有效降低潜浮过程中的阻力,但是由于未设置水平稳定翼,如要保证其垂直稳定性,需通过提高潜水器的稳心高来保证,这样会带来两个方面的不利影响:一方面稳心高的严苛限制对潜水器的总布置设计提出了严格的要求;另一方面由于稳心高较大,下部存在一些空间浪费,会降低潜水器的空间利用率,空间利用率的降低,意味着在同等配置下潜水器需要更大的包络外形,这将会带来阻力和能耗的增加。“深海勇士号”在潜浮阶段,稳定翼为垂直状态,以降低稳定翼的垂向阻力。水下直航时,稳定翼回转变成水平稳定翼,以满足直航垂直稳定性的要求。尽管“深海勇士号”的可回转稳定翼的设计在兼顾直航稳定性的同时能起到降低潜浮运动过程中垂向阻力的功效,但是由于可回转稳定翼端部仍有一段水平固定翼,此固定翼和竖直状态的稳定翼产生的阻力在总垂向阻力中的占比仍不可忽视,存在进一步改进的空间。
技术实现要素:
4.本技术针对上述现有生产技术中的缺点,提供一种潜水器用可伸缩式水平稳定翼,在潜水器潜浮运动过程中,水平稳定翼完全收至潜水器内部,水平稳定翼外端面直接构成主艇体外形,保证主体外形不被破坏,可最大限度降低潜浮阻力,潜水器水下直航过程中,稳定翼在油缸作用下,通过传动机构向两侧伸出,作为潜水器水平稳定翼,最大限度兼顾了潜浮快速性和直航垂直面稳定性的要求,且不会对潜水器的稳心高控制及总布置提出额外要求。
5.本发明所采用的技术方案如下:
6.一种潜水器用可伸缩式水平稳定翼,包括潜水器,所述潜水器内左右对称设置两个水平稳定翼,潜水器左右两侧壁上对称设置水平稳定翼安装孔,两个水平稳定翼能够分别在两个水平稳定翼安装孔中伸缩移动;所述两个水平稳定翼一端分别连接一个伸缩驱动机构,伸缩驱动机构能够推动水平稳定翼沿着水平稳定翼安装孔伸缩移动,实现水平稳定
翼在潜水器内的收缩或在潜水器外的展开。
7.进一步的,水平稳定翼安装孔侧壁上设置导向套,导向套内表面和水平稳定翼外表面吻合连接,并且导向套内表面和水平稳定翼外表面之间设置一定间隙。
8.进一步的,伸缩驱动机构包括伸缩油缸,伸缩油缸的驱动端连接联动杆一端,联动杆另一端连接水平稳定翼。
9.进一步的,两个水平稳定翼一端连接的两个伸缩驱动机构在潜水器内沿着高度方向上下交错分布。
10.进一步的,联动杆包括水平设置的第一水平段,第一水平段一端和伸缩油缸连接,第一水平段另一端和垂直段一端垂直连接,垂直段另一端和第二水平段一端垂直连接,第二水平段另一端和水平稳定翼连接,第二水平段和第一水平段相互平行。
11.进一步的,联动杆的垂直段能够接触导向套内侧,从而形成对水平稳定翼伸展位置的限制。
12.进一步的,水平稳定翼为平行四边形结构,水平稳定翼的横截面为翼型剖面。
13.进一步的,水平稳定翼伸出水平稳定翼安装孔一端为外端面,水平稳定翼的外端面表面与潜水器外表面共面。
14.进一步的,两个水平稳定翼相对端面能够抵触连接,形成对水平稳定翼收缩位置的限制,两个水平稳定翼相对端面抵触时,水平稳定翼的外端面与潜水器外表面共面。
15.本发明的有益效果如下:
16.本发明结构紧凑、合理,操作方便,潜水器潜浮运动过程中,水平稳定翼完全收至潜水器内部,水平稳定翼外端面直接构成主艇体外形,保证主体外形不被破坏,可最大限度降低潜浮阻力,潜水器水下直航过程中,稳定翼在油缸作用下,通过传动机构向两侧伸出,作为潜水器水平稳定翼,最大限度兼顾了潜浮快速性和直航垂直面稳定性的要求,且不会对潜水器的稳心高控制及总布置提出额外要求。
附图说明
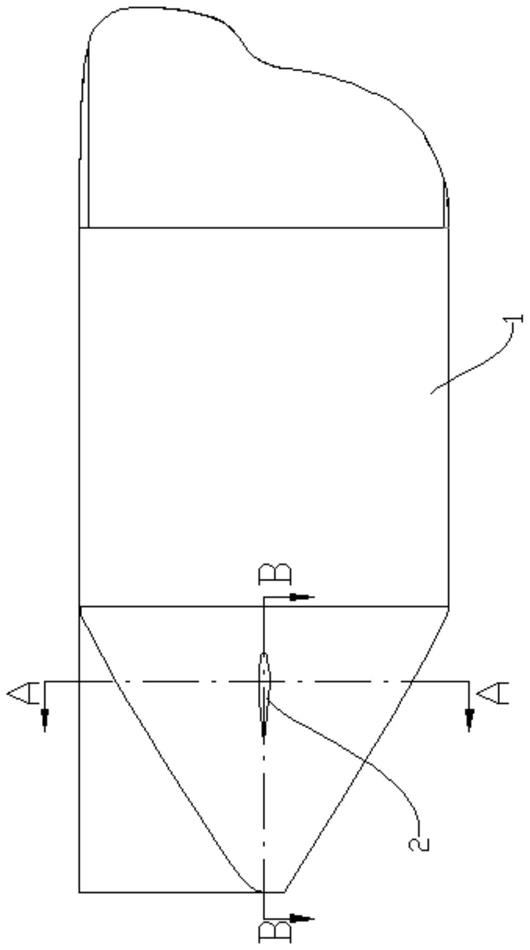
17.图1为本发明水平稳定翼收缩状态结构图。
18.图2为图1中a
‑
a剖视图。
19.图3为图1中b
‑
b剖视图。
20.图4为水平稳定翼横截面结构图。
21.图5为联动杆结构图。
22.图6为本发明水平稳定翼展开状态结构图。
23.图7为图6中c
‑
c剖视图。
24.其中:1、潜水器;2、水平稳定翼;3、导向套;4、联动杆;4.1、第一水平段;4.2、垂直段;4.3、第二水平段;5、伸缩油缸;6、外端面。
具体实施方式
25.下面结合附图,说明本发明的具体实施方式。
26.如图1和图2所示的实施例中,主要包括潜水器1,潜水器1内左右对称设置两个水平稳定翼2,潜水器1左右两侧壁上对称设置水平稳定翼安装孔,两个水平稳定翼2能够分别
在两个水平稳定翼安装孔中伸缩移动。
27.如图2和图4所示的实施例中,水平稳定翼安装孔侧壁上设置导向套3,导向套3内表面和水平稳定翼2外表面吻合连接,并且导向套3内表面和水平稳定翼2外表面之间设置一定间隙,保证水平稳定翼2能够在导向套3内顺畅移动并且不会偏离位置。导向套3用于引导水平稳定翼2的伸缩运动,同时在水平稳定翼2完全回收时可提供辅助支撑。
28.如图2和图3所示的实施例中,两个水平稳定翼2一端分别连接一个伸缩驱动机构,伸缩驱动机构能够推动水平稳定翼2沿着水平稳定翼安装孔伸缩移动,实现水平稳定翼2在潜水器1内的收缩或在潜水器1外的展开。
29.如图2和图3所示的实施例中,伸缩驱动机构包括伸缩油缸5,伸缩油缸5的驱动端连接联动杆4一端,联动杆4另一端连接水平稳定翼2。伸缩油缸5工作时通过联动杆4带动水平稳定翼2一起运动。
30.如图2所示的实施例中,两个水平稳定翼2一端连接的两个伸缩驱动机构在潜水器1内沿着高度方向上下交错分布,节省了伸缩驱动机构在潜水器1内布置占用的横向空间。
31.如图5所示的实施例中,联动杆4包括水平设置的第一水平段4.1,第一水平段4.1一端和伸缩油缸5连接,第一水平段4.1另一端和垂直段4.2一端垂直连接,垂直段4.2另一端和第二水平段4.3一端垂直连接,第二水平段4.3另一端和水平稳定翼2连接,第二水平段4.3和第一水平段4.1相互平行。联动杆4能够保证水平稳定翼2的移动方向和伸缩油缸5的驱动端移动方向保持一致。
32.如图7所示的实施例中,水平稳定翼2伸展到最大尺寸位置时,联动杆4的垂直段4.2能够接触导向套3内侧,从而形成对水平稳定翼2伸展位置的限制。
33.如图2和图3所示的实施例中,水平稳定翼2为平行四边形结构,水平稳定翼2的横截面为翼型剖面。翼型剖面是指机翼、风帆、螺旋桨、直升机旋翼、涡轮的横截面形状。翼型剖面可以改变力的方向,例如可以把平行方向的推力转换为升力,或是将水平方向的旋转力矩转换为垂直方向的推力。水平稳定翼2伸出水平稳定翼安装孔一端为外端面6,水平稳定翼2的外端面6表面与潜水器1外表面共面,从而使得水平稳定翼2的外端面6不破坏潜水器1外表面的流线型结构。
34.如图3所示的实施例中,水平稳定翼2收缩到最内侧位置时,两个水平稳定翼2相对端面能够抵触连接,形成对水平稳定翼2收缩位置的限制。当两个水平稳定翼2相对端面抵触时,水平稳定翼2的外端面6与潜水器1外表面共面。
35.本发明的工作过程描述:
36.(1)潜水器1下潜前,水平稳定翼2为收缩状态,下潜过程中水平稳定翼2一直保持完全收缩状态;
37.(2)潜水器1抵达目标深度后,启动潜水器艇载液压源,液压源驱动伸缩油缸5,伸缩油缸5在液压压力作用下伸出活塞,活塞通过固连的联动杆4驱动水平稳定翼2伸出;
38.(3)水平稳定翼2伸出过程中沿导向套3逐渐伸出潜水器1外表面,直至完全伸出;
39.(4)潜水器1水下航行期间,水平稳定翼2一直保持伸出状态,用于保证潜水器垂直面的稳定性;
40.(5)潜水器1完成水下作业后,再次启动艇载液压源,启动伸缩油缸5,伸缩油缸5泄压,活塞通过固连的联动杆4带动水平稳定翼2收缩;
41.(6)水平稳定翼2收缩过程中沿导向套3完全回收至预定位置(必要时可设置限位块,确保水平稳定翼2外端面构成潜水器主体外形);
42.(7)潜水器1抛载上浮,上浮过程中,水平稳定翼2一直保持完全收缩状态。
43.以上描述是对本发明的解释,不是对发明的限定,本发明所限定的范围参见权利要求,在本发明的保护范围之内,可以作任何形式的修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1