一种基于转向河道的无动力船辅助驱动设备及其驱动方法
1.本发明涉及航运技术领域,尤其涉及一种基于转向河道的无动力船辅助驱动设备及其驱动方法。
背景技术:
2.无动力船在长江水域拖带过程中存在一定的风险,无动力船在拖带过程中主要受长江自然环境、航行水域条件及水域交通条件等因素的影响较大。被拖的无动力船体尚未配置专业的发电、通讯、照明、信号等设施,需要进行临时配置。如若主拖轮因某些原因突然停车时,由于被拖船体的惯性较大,会产生横拖、倒拖、甚至碰撞前面拖轮的危险。无动力船船体尺度、排水量大、易受风、流等因素的影响,船位调整和控制困难,且船体干舷相对于拖轮而言比较高,拖轮系缆困难,并影响到拖轮动力的发挥。
3.拖轮拖带无动力船运输是为了适应长江内河航道的特点而发展起来的。与机动货船运输相比,由于受桥梁净空高度的限制,若在船坞内对新造船舶进行上层建筑进行舾装,则新造船舶将无法通过桥梁。因此,需要利用拖轮带缆拖带新造船舶至长江下游码头进行对船舶上层建筑进行组装等作业。
4.由于船队的尺度和高度均较大,在航行中,受到风浪、风向、水流流向等自然条件的影响,会有一定的上下颠簸、左右漂移情况,尤其是在转向时,无动力船两侧的水流会明显不一样,行进时整体稳定性极差。另一方面,在通过桥梁下方时,若受风流等自然条件的影响过大,将会产生船撞桥的危险。空载时的受风面积很大,风力较大时,将会严重影响到整个船队的拖带作业。
技术实现要素:
5.本发明克服了现有技术的不足,提供一种基于转向河道的无动力船辅助驱动设备及其驱动方法。
6.为达到上述目的,本发明采用的技术方案为:一种基于转向河道的无动力船辅助驱动设备,包括:设置在无动力船两侧的若干拖轮组,所述拖轮组包括:对称设置在所述无动力船前部的两个主拖轮以及对称设置在所述无动力船后部的主拖轮。
7.在每个所述主拖轮内均设置前端卷收器、中部卷收器和尾部卷收器,所述前端卷收器通过倒揽连接所述无动力船侧面,所述中部卷收器通过第一拖揽连接所述无动力船侧面,所述尾部卷收器通过第二拖揽连接所述无动力船侧面。
8.所述无动力船前端设置半潜船,所述半潜船设置在所述无动力船下方,在所述无动力船前方50
‑
100米处设置探测无人机,所述探测无人机用于探测风速水流流速。
9.本发明一个较佳实施例中,在所述无动力船一侧设置应急拖轮,所述应急拖轮用于辅助调整无动力船运行姿态。
10.本发明采用的另一种技术方案为:一种基于转向河道的无动力船辅助驱动设备的驱动方法,包括以下步骤:
11.步骤s1:当无动力船行进至弯道处时,无动力船前方的探测无人机会探测所处环境的风速以及水流流速,为各个拖轮的功率以及各个缆绳的放缆率提供基础数据。
12.步骤s2:当无动力船左侧主拖轮上的所述第一拖揽和所述第二拖揽的放缆率增大,且所述倒揽的放缆率减小;无动力船右侧主拖轮上的所述第一拖揽和所述第二拖揽放缆率减小,且所述拖揽的放缆率增大时,无动力船向右侧方向调整。
13.步骤s3:当无动力船左侧主拖轮上的所述第一拖揽和所述第二拖揽的放缆率减小,且所述倒揽的放缆率增大;无动力船右侧主拖轮上的所述第一拖揽和所述第二拖揽放缆率增大,且所述拖揽的放缆率减小时,无动力船向左侧方向调整。
14.本发明一个较佳实施例中,设定无动力船幅宽方向的对称轴为虚拟对称线,调整无动力船两侧的若干主拖轮均与虚拟对称线之间的夹角β,以克服无动力船两侧水流的流速差,使无动力船沿设定方向前进。
15.本发明一个较佳实施例中,无动力船根据风速调整航向的方法,包括以下步骤:
16.步骤s1.1:当风从无动力船左侧吹来,以风向与虚拟对称线之间夹角为横向受力角α,计算公式wp*cosα=f*cosβ,式中,wp为风力大小,f为若干个主拖轮的总驱动力。
17.步骤s1.2:根据风向与虚拟对称线之间夹角为横向受力角α,调整若干个主拖轮的总驱动力,同时调整无动力船两侧的主拖轮与虚拟对称线之间的夹角β,克服风力干扰,使无动力船始终保持设定方向前进。
18.本发明一个较佳实施例中,所述无动力船的整体宽度的计算公式为:h
总
=h
船
+(h
拖1
+h
拖2
)xa,式中,h
总
为无动力船的整体宽度,h
船
为无动力船的实际宽度,h
甲
为主拖轮的宽度,a为放缆率。
19.本发明一个较佳实施例中,所述放缆率计算公式为:a=l1/(l1+l2),式中,l1为缆绳释放长度,l2缆绳卷收长度,(l1+l2)为缆绳总长度。
20.本发明一个较佳实施例中,通过分别改变所述倒揽、所述第一拖揽和所述第二拖揽的放缆率,以改变主拖轮与无动力船之间的贴合程度。
21.本发明一个较佳实施例中,利用半潜船微调带动船头上升下降,以微调船头和船艉吃水差,改变风动力和水动力的作用点,增大偏荡阻尼,实现偏荡的抑制。
22.本发明一个较佳实施例中,所述无人机还用于探测无动力船前方是否存在障碍物以及其所处位置,波浪大小及位置。
23.本发明解决了背景技术中存在的缺陷,本发明具备以下有益效果:
24.(1)本发明中无动力船能够根据横向受力角α,灵活调整若干个主拖轮的总驱动力,同时调整无动力船两侧的主拖轮与虚拟对称线之间的夹角β,精准克服风力干扰,确保无动力船能够沿设定方向前进,同时,以若干个主拖轮的总驱动力和夹角β两个不同变量数据,能够根据情况进行适应性调整,可操作范围更广,整体操作更具备实用性。
25.(2)本发明通过在无动力船前方设置的探测无人机,能够及时探测所处环境的水流流速,为各个拖轮的功率以及各个缆绳的放缆率提供基础数据,使无动力船在主拖轮的驱动下,克服无动力船两侧水流的流速差,保证无动力船始终沿设定方向前进。
26.(3)本发明通过卷收器控制各个揽绳的放缆率,改变甲板驳与无动力船的连接紧密度,调整无动力船的整体宽度,以调整无动力船和拖轮的整体受力面积,增强无动力船体拖动时的稳定性,另一方面,通过改变放缆率,能够迅速调整无动力船的航行方向,使无动
力船能够根据航道的宽窄和方向,迅速调整,使各个主拖轮之间协同作用效果更好。
27.(4)本发明中无人机还能够探测无动力船前方是否存在障碍物以及其所处位置,波浪大小及位置。进一步完善为各个拖轮的功率以及各个缆绳的放缆率提供的基础数据,有效防止无动力船偏航,使其航向控制更精准。同时,倒揽、第一拖揽和第二拖揽的放缆率的控制互不影响,不仅可以改变主拖轮与无动力船之间的贴合程度,还能够进一步实现对航向的控制。
附图说明
28.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
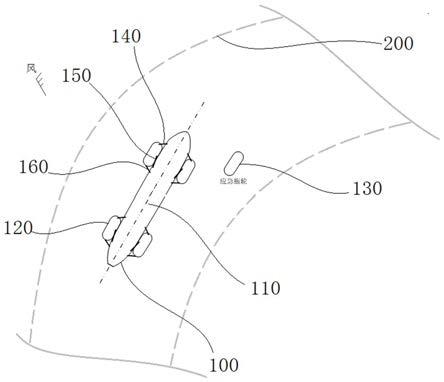
29.图1为本发明优选实施例的平面示意图;
30.图2为本发明优选实施例无动力船受风力影响的平面示意图。
31.100
‑
无动力船,110
‑
虚拟对称线,120
‑
主拖轮,130
‑
应急拖轮,140
‑
倒揽,150
‑
第一拖揽,160
‑
第二拖揽,200
‑
航道边界。
具体实施方式
32.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
33.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是本发明还可以采用其他不同于在此描述的其他方式来实施,因此,本发明的保护范围并不受下面公开的具体实施例的限制。
34.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本发明中的具体含义。
35.如图1和图2所示,一种基于转向河道的无动力船100辅助驱动设备及其驱动方法,包括:设置在无动力船100两侧的若干拖轮组,拖轮组包括:对称设置在无动力船100前部的两个主拖轮120以及对称设置在无动力船100后部的主拖轮120。
36.在每个主拖轮120内均设置前端卷收器、中部卷收器和尾部卷收器,前端卷收器通过倒揽140连接无动力船100侧面,中部卷收器通过第一拖揽150连接无动力船100侧面,尾部卷收器通过第二拖揽160连接无动力船100侧面,在无动力船100一侧设置应急拖轮130,通过应急拖轮130辅助调整无动力船100运行姿态,防止船体偏航或协助纠正船队航向。
37.本发明一个较佳实施例中,无动力船100前端设置半潜船,半潜船设置在无动力船100下方,利用半潜船带动船头上升下降,以改变船头和船艉吃水差,使风动力的作用点后
移,水动力的作用点前移,使偏荡的阻尼增大,实现偏荡的抑制,同时,通过控制船头上升下降,调整无动力船100受到的阻力,灵活调整无动力船100的行进状态。
38.本发明一个较佳实施例中,无动力船100能够根据横向受力角α,灵活调整若干个主拖轮120的总驱动力,同时调整无动力船100两侧的主拖轮120与虚拟对称线110之间的夹角β,精准克服风力干扰,进一步确保无动力船100能够沿设定方向前进,同时,以若干个主拖轮120的总驱动力和夹角β两个不同变量数据,能够根据情况进行适应性调整,可操作范围更广,整体操作更具备实用性。
39.本发明一个较佳实施例中,在无动力船100前方50
‑
100米处设置探测无人机,优选为无动力船100前方60米处,通过在无动力船100前方设置的探测无人机,能够及时探测所处环境的水流流速,为各个拖轮的功率以及各个缆绳的放缆率提供基础数据,使无动力船100在主拖轮120的驱动下,克服无动力船100两侧水流的流速差,保证无动力船100始终沿设定方向前进。
40.本发明一个较佳实施例中,无动力船100的整体宽度的计算公式为:h
总
=h船+(h
拖1
+h
拖2
)xa,式中,h
总
为无动力船100的整体宽度,h
船
为无动力船100的实际宽度,h
甲
为主拖轮120的宽度,a为放缆率,放缆率计算公式为:a=l1/(l1+l2),式中,l1为缆绳释放长度,l2缆绳卷收长度,(l1+l2)为缆绳总长度;通过卷收器控制各个揽绳的放缆率,改变甲板驳与无动力船100的连接紧密度,调整无动力船100的整体宽度,以调整无动力船100和拖轮的整体受力面积,增强无动力船100体拖动时的稳定性,另一方面,通过改变放缆率,能够迅速调整无动力船100的航行方向,使无动力船100能够根据航道的宽窄和方向,迅速调整,使各个主拖轮120之间协同作用效果更好。
41.本发明一个较佳实施例中,无人机还能够探测无动力船100前方是否存在障碍物以及其所处位置,波浪大小及位置。进一步完善为各个拖轮的功率以及各个缆绳的放缆率提供的基础数据,有效防止无动力船100偏航,使其航向控制更精准。
42.本发明一个较佳实施例中,分别改变倒揽140、第一拖揽150和第二拖揽160的放缆率,以改变主拖轮120与无动力船100之间的贴合程度,倒揽140、第一拖揽150和第二拖揽160的放缆率的控制互不影响,不仅可以改变主拖轮120与无动力船100之间的贴合程度,还能够进一步实现对航向的控制。
43.本发明使用时,当无动力船100行进至弯道处时,无动力船100前方的探测无人机会探测所处环境的风速以及水流流速,为各个拖轮的功率以及各个缆绳的放缆率提供基础数据。当无动力船100左侧主拖轮120上的第一拖揽150和第二拖揽160的放缆率增大,且倒揽140的放缆率减小;无动力船100右侧主拖轮120上的第一拖揽150和第二拖揽160放缆率减小,且拖揽的放缆率增大时,无动力船100向右侧方向调整。当无动力船100左侧主拖轮120上的第一拖揽150和第二拖揽160的放缆率减小,且倒揽140的放缆率增大;无动力船100右侧主拖轮120上的第一拖揽150和第二拖揽160放缆率增大,且拖揽的放缆率减小时,无动力船100向左侧方向调整。
44.需要说明的是,设定无动力船100幅宽方向的对称轴为虚拟对称线110,调整无动力船100两侧的若干主拖轮120均与虚拟对称线110之间的夹角β,以克服无动力船100两侧水流的流速差,使无动力船100沿设定方向前进。
45.本发明一个较佳实施例中,当风从无动力船100左侧吹来,以风向与虚拟对称线
110之间夹角为横向受力角α,计算公式wp*cosα=f*cosβ,式中,wp为风力大小,f为若干个主拖轮120的总驱动力;根据风向与虚拟对称线110之间夹角为横向受力角α,调整若干个主拖轮120的总驱动力,同时调整无动力船100两侧的主拖轮120与虚拟对称线110之间的夹角β,克服风力干扰,使无动力船100始终保持设定方向前进。
46.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
47.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1