船坞及无人船系统的制作方法
1.本发明涉及无人船技术领域,尤其涉及一种船坞及无人船系统。
背景技术:
2.无人船,融合了船舶、通信、自动化、机器人控制、远程监控、网络化系统等技术,实现了自主导航、智能避障、远距离通信、视频实时传输和网络化监控等功能,正被日益广泛应用于环保监测、科研勘探、水下测绘、搜索救援、安防巡逻乃至军事领域。
3.传统的遥控无人船已经不符合主流技术潮流,代之以卫星定位技术和5g通信技术实现的远程控制,然而,无人船的维护、回收仍然需要人员手动完成,使得无人船的使用无法实现完全自动化。
技术实现要素:
4.本发明的目的在于提供一种船坞和无人船系统,用于停放无人船,用以提高无人船的自动化程度。
5.本发明解决其技术问题是采用以下的技术方案来实现的。
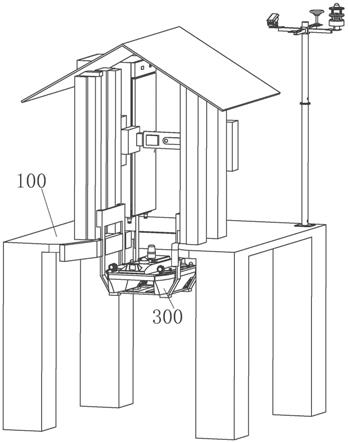
6.一种船坞,用于停放无人船,包括基座和升降装置,基座包括平台,平台上设有升降口,升降装置包括基柱组和抬升架,基柱组设置于升降口的上边沿,抬升架与基柱组滑动连接,抬升架适于放置无人船,并适于沿着基柱组滑动以穿过升降口。
7.较佳地,升降口的左右两侧设置有侧向防撞条。
8.较佳地,平台设有引导模块,引导模块包括与侧向防撞条连接的近端,以及远离侧向防撞条的远端,远端为自由端。
9.较佳地,船坞包括两个引导模块,两个引导模块的近端分别与升降口的左右两侧设置的侧向防撞条连接,两个引导模块的远端之间距离较近端之间的距离远。
10.较佳地,基柱组上设置有滑道,抬升架包括滑块,滑块适于沿着滑道滑动。
11.较佳地,抬升架包括一沿着水平面延伸的底台和两沿着竖直面延伸的侧部支架,滑块固定设置于侧部支架上,侧部支架与底台固定连接。
12.较佳地,抬升架还包括两相对于水平面倾斜的连接部,侧部支架通过连接部与底台固定连接。
13.较佳地,船坞包括充电装置和定滑块,充电装置包括动滑块、充电电机、充电安装板和充电对接装置,定滑块固定设置于基柱组上,定滑块上设置有定滑槽,充电安装板的两端分别与动滑块固定连接,充电电机适于驱动动滑块沿着定滑槽滑动,充电对接装置适于与无人船的充电对接模块对接以对无人船进行充电。
14.较佳地,充电装置包括固定装置,固定装置适于与无人船的固定模块对接以固定无人船。
15.本发明还提供一种无人船系统,包括无人船以及本发明提供的船坞。
16.本发明提供的船坞和无人船系统,设置有基座和升降装置,该升降装置包括基柱
组和抬升架,该抬升架适于放置该无人船,并适于带着该无人船相对于该基柱组上下滑动,从而使得该无人船脱离水面,可以进行自动维护、充电等操作。
附图说明
17.图1为本发明实施例提供的船坞与无人船配合的结构示意图。
18.图2为图1中无人船的结构示意图。
19.图3为图1中船坞的结构示意图。
20.图4为图3中引导模块、抬升架和升降口相互配合的结构示意图。
21.图5为图3中抬升架的结构示意图。
22.图6为图3中充电装置的结构示意图。
具体实施方式
23.为更进一步阐述本发明为达成预定发明目的所采取的技术方式及功效,以下结合附图及实施例,对本发明的具体实施方式、结构、特征及其功效,详细说明如后。
24.请参图1
‑
图6,本发明实施例提供一种船坞100,用于停放无人船300。该船坞100包括基座110和升降装置140,该基座110包括平台111,该平台111上设有升降口130,该升降装置140包括基柱组141和抬升架145,该基柱组141设置于该升降口130的上边沿,该抬升架145与该基柱组141滑动连接,该抬升架145适于放置该无人船300,并适于沿着该基柱组141滑动以穿过该升降口130。
25.本发明实施例中,无人船300包括船体310,该船体310的船尾设置有固定模块350和充电对接模块370。
26.可以理解,无人船300进入该抬升架145后,该抬升架145沿着该基柱组141滑动,穿过该升降口130,从而将该无人船300提升到设定高度。
27.可以理解,由于将无人船300提升到设定高度,使无人船300脱离对水的接触,可以避免水的上下浮动对无人船300的影响。
28.本发明较佳实施例中,该基座110包括支撑柱113,该支撑柱113设置于该平台111下方,该支撑柱113与该平台111一体成型,该支撑柱113适于插入泥土中。
29.本发明较佳实施例中,该基座110包括四个该支撑柱113,四个该支撑柱113分别设置于该平台111的四个边角处。
30.本发明较佳实施例中,该升降口130的左右两侧设置有侧向防撞条131。
31.可以理解,该侧向防撞条131起到保护该船坞100和该无人船300的作用。
32.本发明较佳实施例中,该侧向防撞条131上设有导向槽131a,该导向槽131a适于该抬升架145穿过。
33.可以理解,该抬升架145穿过设置于该侧向防撞条131上的导向槽131a,可以避免该抬升架145与该无人船300之间的碰撞,起到保护该抬升架145和该无人船300的作用。
34.本发明较佳实施例中,该平台111设有引导模块137,该引导模块137包括与该侧向防撞条131连接的近端,以及远离该侧向防撞条131的远端,该远端为自由端。
35.本发明较佳实施例中,包括两个该引导模块137,两个该引导模块137的近端分别与该升降口130的左右两侧设置的侧向防撞条131连接,两个该引导模块137的远端之间距
离较该近端之间的距离远。
36.可以理解,该引导模块137呈内紧外松的喇叭状,可以起到纠偏的作用,当该无人船300在进入该抬升架145的过程中出现偏差时,该无人船300在该引导模块137的作用下,进入该抬升架145内。
37.本发明较佳实施例中,该引导模块137呈圆弧形,该引导模块137的内弧面朝向该基座110。
38.本发明较佳实施例中,该升降口130的后侧设有后向防撞条133。
39.本发明较佳实施例中,该升降装置140还包括电机,该电机适于驱动该抬升架145沿着该基柱组141滑动。
40.本发明较佳实施例中,该基柱组141包括四个基柱141a,四个该基柱141a分别设置于该升降口130的四个角。
41.本发明较佳实施例中,该基柱组141上设置有滑道,该抬升架145包括滑块145a,该滑块145a适于沿着该滑道滑动。
42.本发明较佳实施例中,该抬升架145包括一沿着水平面延伸的底台145b和两沿着竖直面延伸的侧部支架145c,该滑块145a固定设置于该侧部支架145c上,该侧部支架145c与该底台145b固定连接。
43.本发明较佳实施例中,该抬升架145还包括两相对于水平面倾斜的连接部145d,该侧部支架145c通过该连接部145d与该底台145b固定连接。
44.可以理解,在该抬升架145载着该无人船300向上移动的过程中,由于该连接部145d相对于水平面倾斜,该无人船300接触该连接部145d后会向该抬升架145的中间移动,起到居中该无人船300的作用。
45.本发明较佳实施例中,该升降装置140包括坞篷147,该坞篷147固定设置于该基柱组141上端。
46.可以理解,该坞篷147可以为停放在船坞100中的无人船300遮避雨水。
47.本发明较佳实施例中,船坞100包括充电装置150和定滑块153,该充电装置150包括动滑块155、充电电机、充电安装板157和充电对接装置158,该定滑块153固定设置于该基柱组141上,该定滑块153上设置有定滑槽,该充电安装板157的两端分别与该动滑块155固定连接,该充电电机适于驱动该动滑块155沿着该定滑槽滑动,该充电对接装置158适于与该无人船300的充电对接模块370对接以对该无人船300进行充电。
48.本发明较佳实施例中,该船坞100包括固定部151,该定滑块153通过该固定部151固定设置于该基柱组141上。
49.本发明较佳实施例中,该充电装置150包括固定装置159,该固定装置159适于与该无人船300的固定模块350对接以固定该无人船300。
50.可以理解,该抬升架145将该无人船300提升到设定高度后,在充电电机的驱动下,该该动滑块155带动该充电安装板157沿着该定滑槽滑动,从而实现该充电对接装置158与该无人船300的充电对接模块370对接以对该无人船300进行充电,而该固定装置159与该无人船300的固定模块350对接从而固定该无人船300
51.本发明较佳实施例中,该固定装置159包括两相对设置的电磁铁。
52.可以理解,无人船300的固定模块可以为两相对设置的吸铁石或电磁铁或铁块。
53.本发明较佳实施例中,两电磁铁分别设置于该充电对接装置158的两侧。
54.本发明较佳实施例中,还包括电控箱160,该电控箱160设置于该基座110上,该电控箱160适于向该船坞100供电。
55.本发明较佳实施例中,还包括基柱170、摄像头180和风雨传感器190,该基柱170设置于该基座110上,该摄像头180和该风雨传感器190设置于该基柱170上。
56.本发明实施例还提供一种无人船系统,包括无人船300以及本发明实施例提供的船坞100。
57.本发明实施例提供的船坞100和无人船系统,设置有基座110和升降装置140,该升降装置140包括基柱组141和抬升架145,该抬升架145适于放置该无人船300,并适于带着该无人船300相对于该基柱组141上下滑动,从而使得该无人船300脱离水面,可以进行自动维护、充电等操作,增强无人船300的自动化程度。
58.在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,除了包含所列的那些要素,而且还可包含没有明确列出的其他要素。
59.在本文中,所涉及的前、后、上、下等方位词是以附图中零部件位于图中以及零部件相互之间的位置来定义的,只是为了表达技术方案的清楚及方便。应当理解,所述方位词的使用不应限制本技术请求保护的范围。
60.在不冲突的情况下,本文中上述实施例及实施例中的特征可以相互结合。
61.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1