用于水下检测与抓取作业的碟形机器人系统
1.本实用新型涉及一种用于内陆湖泊或者近海水下区域建筑物损伤检测与小型目标抓取作业的多功能水下机器人系统。
背景技术:
2.目前应用于水下作业的机器人主要有3种,拖缆式水下机器人(rov)、自主式水下机器人(auv)以及两种模式共存的混合式水下机器人。拖缆式水下机器人具有作业深度大、工作时间长、出现故障易回收等特点。自主式水下机器人无脐带电缆,运动灵活、覆盖面广,但续航时间短,不适合长时间水下作业。混合式水下机器人综合了二者的优点,但结构复杂、成本高昂。
3.水下机器人的本体结构主要分为2种类型:框架型和流线型。框架型水下机器人外部形状为框架,是rov的主要构型,推进器、密封舱、照明设备、摄像头等安装在框架内部。框架型rov本体的主要优势是总体布置很便捷,能搭载较多传感器、推进器等外部设备,另外配备浮力模块会使设备重心下降,具有较好的姿态稳定性;缺点在于框架增加了水中的阻力,需要的推进器功率较大,且机器人运动较缓慢。流线型水下机器人外部结构符合流线型设计,密封舱、相机、照明灯等安放在流线型结构内部,其显著的优势是行进阻力低,能在水下高速移动,抵抗来流干扰能力较强;其劣势在于,定点和长航时作业能力较差。
4.现有的带机械臂水下作业机器人一般为框架型,因框架结构能为机械臂提供有效的支撑空间,且能够悬停作业。为实现水下的复杂任务,该类型的机械臂一般具有多个运动自由度,机械臂的每个自由度依靠电机直接驱动或者液压系统进行驱动,故该类型的机械臂整体结构复杂,体积较大。当机械臂安装在机器人本体上时,将导致机器人重心偏移,需要添加配重块来调节水下机器人整体的重心和浮心,从而保证水下机器人运动的平稳性。该种机械臂增加了整机的重量,也增大了流体阻力。在机械臂运动过程中,与机器人本体产生相对运动,影响rov对位置和姿态的控制。另外,机械臂水下作业时受流体阻力大,其操作的灵活性受限,难以达到较高作业精度。
5.另一方面,在面向水下多目标作业任务中,通常采用数个水下机器人编队去协同完成使命,在多个机械手的协作配合下完成任务(如水下大体积物体的打捞)。此过程中的必要部件是多个执行器末端,而水下机器人本体主要提供支撑和固定作用。因此,若能够将多个机器人本体缩减为一个本体,那么将带来成本的降低和应用方便性的提升。
技术实现要素:
6.有鉴于此,本实用新型的目的是提供一种由水下机器人本体与多个机械手柔性连接构成的水下机器人系统。该水下机器人主体为碟形结构,机器人主体底面相较于顶面具有较小的曲率,在较高水流速度的应用场景时,可提供额外的升力。机器人主体底面设计了金字塔形的损伤检测模块,可应用于水下坝体和桥墩等建筑结构的损伤检测;该金字塔形损伤检测模块利用平面镜成像原理,先在平面镜中呈现检测目标的图像,再用相机采集平
面镜中的检测目标图像。相机采集图像的有效物距为平面镜成像的物距和像距之和,在机器人底部金字塔形舱体结构紧凑的约束下,为相机提供了有效的物距。金字塔底面边缘设计了柔性隔膜,保证机器人在水下不同作业深度时,金字塔内外的压力平衡。
7.另一方面,本实用新型将机械抓手单独封装成一个配件,协同作业只需要多个模块化抓手配合即可完成。这些抓手都可通过缆线柔性连接到一台水下机器人本体上,将现有自由度较多且可达距离长的机械臂体浓缩为一个自由度的抓手,极大减少了以往水下协同系统中的冗余硬件,减少了电力传输故障发生的可能性;多机械手协同合作,既降低了成本,也提高了作业效率。模块化抓手整体采用类四旋翼无人机的运动方式,在模块化抓手上配置4个螺旋桨来提供灵巧的位姿调节能力。由于模块化抓手与机器人本体的连接为柔性线缆,可在一些水下机器人本体通过不了的水下结构(如礁石、洞穴、暗礁等)中,执行抓取等作业任务,较传统机械臂具有较大的优势。
8.本实用新型的水下检测与抓取作业的机器人系统结合了流线型的机器人本体结构、金字塔型的损伤检测模块和模块化抓手等技术,将显著提高水下作业的质量和效率,实现水下的高效检测与抓取作业。本实用新型设计的模块化抓手能应用在各种水下装配任务、水下复杂结构的建造和维护、水下管道的维护和铺设、水下搜救任务、水下捕捞和拖网、水下构件和船体的清洗等场景中。
9.本实用新型的水下检测与抓取作业的机器人系统包括水下机器人本体和通过缆线与水下机器人本体连接的模块化抓手;所述水下机器人本体包括碟形外壳、分布于碟形外壳侧部的推进器、设置于碟形外壳底部的损伤检测模块和超声波清洗模块、设置于碟形外壳内部的前视相机和传感器;所述模块化抓手包括流线型的抓手机体、绕所述抓手机体设置的多个螺旋桨推进器、设置于抓手机体下方的抓手和设置于抓手机体内用于驱动所述抓手动作的抓手驱动组件。
10.进一步,所述碟形外壳包括底部具有矩形开口的流线型壳体和固定于流线型壳体顶部的上盖;所述损伤检测模块包括固定于所述矩形开口的视窗边框、固定于视窗边框的透明有机玻璃板、与所述透明有机玻璃板共同围成金字塔型腔体的四块侧板、固定于两块相对的所述侧板表面的平面镜和设置于金字塔型腔体内的两个分别面向平面镜表面的损伤检测相机;所述金字塔型腔体内注有纯净水。
11.进一步,所述有机玻璃板边缘设置有柔性隔离膜;所述损伤检测相机镜头4周呈环形阵列分布有led灯。
12.进一步,所述推进器包括两对垂直安装于碟形外壳左右两侧的推进器ⅰ和两对水平安装于碟形壳体前后两侧的推进器ⅱ;同侧的两个所述推进器ⅱ的轴线夹角为60
°
。
13.进一步,所述传感器包括惯性测量单元、超短基线和深度传感器。
14.进一步,所述超声波清洗模块包括设置于视窗边框两侧的换能器震头安装板和用于激发换能器震头安装板振动的超声换能器震头。
15.进一步,所述抓手驱动组件包括微型减速电机、通过联轴器与微型减速电机的转轴连接的丝杠、与丝杠通过螺纹配合的丝杠螺母和固定于丝杠螺母上的伸缩杆;所述伸缩杆的下端铰接于抓手的手指末端。
16.进一步,所述抓手的手指上设有防滑沟槽和柔性网兜。
17.本实用新型的有益效果为:
18.(1)本实用新型的水下机器人本体采用流线型壳体结构,具有良好的水动力性能和抗流能力。水下机器人本体采用流线型碟形壳体,壳体内部密封形成空腔。外部搭载推进器、照明灯、传感器等设备,内部有足够空间安装电子设备、电路板等元件,同时流线型壳体在横移运动方向上的行进阻力低,水动力性能较好,减小了流体在运动方向的阻力作用面积,提升了抗流能力;另外,水下机器人本体顶面较底面曲率大,能够将来流阻力有效转化为升力。
19.(2)本实用新型的损伤检测模块的金字塔型腔体内外零压差,适应不同深度检测作业。在金字塔形腔体内部注入纯净水,在透明有机玻璃边缘增加柔性隔膜,能够平衡水下压力,使得作用在承压有机玻璃板上的压差极大减小,从而适应不同深度的作业任务,并且玻璃板极小的变形量不会造成损伤拍摄的畸变。
20.(3)本实用新型的金字塔型损伤检测模块结构紧凑,可与水下机器人本体有效结合。在金字塔腔体两个相对的内壁上安装平面镜,两相机通过中间的安装架成一定角度面向两平面镜。本实用新型未采用相机直接拍摄探测目标的图像,而是利用平面镜成像原理,将探测对象的全貌成像在平面镜里面,再用相机拍摄平面镜里面检测目标的虚像。利用平面镜成像,为检测机构提供了有效的物距,且使得底部金字塔形舱体结构更加紧凑。同时将led灯布置在相机镜头的圆周上,消除了led灯在图像中形成的光斑对成像的影响,提高对裂缝、孔洞等结构损伤判断的准确性。
21.(4)本实用新型的金字塔型损伤检测模块易于拆装和扩展。机器人本体底部可搭配不同的金字塔形舱体结构的损伤检测模块,除本实用新型中所述壁面损伤检测机构外,可配置额外的柔性抓手模块,提供水下救援和抓取等作业功能;也可以将脐带缆拆除,在金字塔形舱体中配置锂电池,将rov转换成auv;还可以搭载水声通信或者检测机构。
22.(5)本实用新型的抓手模块灵活高效,易于控制,流体阻力小。抓手模块利用电机、丝杠螺母副等机械结构,将电机输出的旋转运动转化为直线运动,再通过连杆机构,在丝杠螺母连杆直线伸出时打开抓手,连杆回退时收紧抓手,即由一个自由度控制抓手的开合。抓手主体上有防滑沟槽,可增大对被抓取目标的约束力,提高抓取的可靠性。在抓手主体上,配备有柔性网兜,抓取海产品时,在增大容纳的空间的同时也提供了一定的弹性约束,同时通过柔性网兜能减轻对海产品的损坏。抓手模块的电机箱体都为椭球形结构,减小了流体阻力,提升了行进效率。
23.(6)抓手模块化,扩展便捷,作业效率高,成本低。抓手模块具备可复制性,通过电缆连接在水下机器人本体底部上,可以依据实际需求复制多个抓手模块,协同完成作业任务,提高操作效率,降低制造成本。
24.(7)抓手模块运动自由度大,适用面更广。类似于四旋翼无人机的运动方式,利用4个同平面的螺旋桨给抓手提供动力,且抓手与本体间只有电缆和柔性钢索连接,抓手的运动范围所受限制小,可达范围更广。同时抓手体积较小,能到达机器人本体到达不了的水下狭小空间,增加了作业范围。
附图说明
25.下面结合附图和实施例对本实用新型作进一步描述:
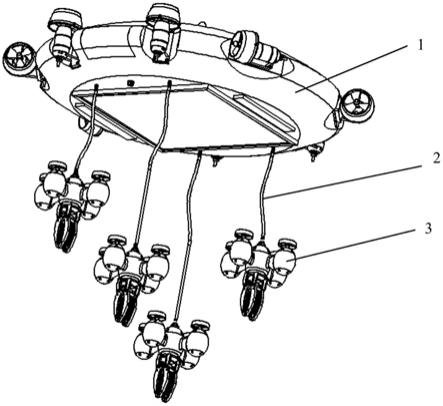
26.图1为本实用新型的系统总体结构的轴测图;
27.图2为本实用新型的水下机器人本体的俯视图;
28.图3为本实用新型的水下机器人本体的轴测图;
29.图4为本实用新型的水下机器人本体的主视图;
30.图5为本实用新型的水下机器人本体的仰视图;
31.图6为本实用新型的水下机器人本体的内部结构示意图;
32.图7为本实用新型的流线型壳体的俯视图;
33.图8为本实用新型的流线型壳体的轴测图;
34.图9为本实用新型的金字塔型腔体的轴测图;
35.图10为本实用新型的金字塔型腔体的俯视图;
36.图11为本实用新型的金字塔型腔体的剖视图;
37.图12为本实用新型的抓手模块的主视图;
38.图13为本实用新型的抓手模块的剖视图;
39.图14为本实用新型的抓手模块的轴测图;
40.图15为本实用新型的抓手驱动组件的剖视图;
41.图16(a)和图16(b)分别为本实用新型的左手指和右手指的示意图。
具体实施方式
42.如图1所示,本实施例的用于水下检测与抓取作业的机器人系统包括水下机器人本体和通过缆线2与水下机器人本体连接的模块化抓手3;
43.如图2
‑
5所示,所述水下机器人本体1包括碟形外壳、分布于碟形外壳侧部的推进器、设置于碟形外壳底部的损伤检测模块和超声波清洗模块、设置于碟形外壳内部的前视相机112和传感器;
44.如图12
‑
14,所述模块化抓手3包括流线型的抓手机体、绕所述抓手机体设置的四个螺旋桨推进器、设置于抓手机体下方的抓手和设置于抓手机体内用于驱动所述抓手动作的抓手驱动组件。
45.如图3
‑
5所示分别为本实施例的水下机器人本体1的轴测图、主视图和仰视图,所述碟形外壳包括底部具有矩形开口的流线型壳体13和固定于流线型壳体13顶部的上盖11;本实施例的机器人主体采用飞碟形的流线型的外壳,并在底部嵌入一个金字塔型腔体结构的损伤检测模块。流线型壳体13通过上部的上盖11和下部的损伤检测模块封闭后形成一个密闭空间,里面可放置控制电路板、内置传感器、备用电池、漏水检测电路、前视相机112等。上盖11上端设有线缆接头12。前视相机112朝向水平拍摄,用于提供水下机器人前向的图像视角,因此流线型壳体13侧部应相应设置供前视相机112拍摄的视窗15。碟形外壳内构成的内部密封空腔,一方面为元器件、传感器的安放提供位置;另一方面内部的空腔可产生较大的浮力,使得不用添加额外的浮体材料来增大机器人整体的浮力,就能满足水下机器人对浮力的需求。另外,本实施例的碟形外壳的顶面较底面曲率大,能够将来流阻力有效转化为升力,因此在较高水流速度的应用场景下,该外壳形状可提供额外的升力。
46.如图6
‑
11所示,本实施例中的损伤检测模块包括固定于流线型壳体13底部的矩形开口处的视窗边框19、固定于视窗边框19的透明有机玻璃板18、与所述透明有机玻璃板18共同围成金字塔型腔体的四块侧板116、固定于两块相对的所述侧板116表面的平面镜122
和设置于金字塔型腔体内的两个分别面向平面镜122表面的损伤检测相机121;所述金字塔型腔体内注有纯净水。视窗边框19上安装的透明有机玻璃板18,使得水下观测目标可透过矩形视窗,成像在平面镜122上。如图11所示,金字塔型腔体顶部依次通过连接管119和三通管120安装有两个对称设置的损伤检测相机121,该相机用于采集平面镜122中的虚像,并通过一定的图像算法处理后,判断该检测对象的表面健康状况。损伤检测相机121的镜头四周呈环形均匀分布有多个led小灯,在提供照明的同时,通过密集的光强来消除光斑对图像的遮掩影响。金字塔型腔体顶部设有进水口和排水口,并分别通过进水螺栓117和出水螺栓118封闭,在金字塔型的密闭空间中注入纯净水,可以在较污浊的水下环境中,减轻悬浮物和浑水对摄像机视野的影响,拍出效果更清晰的图像;有机玻璃板18边缘设置有柔性隔离膜,该隔离膜能够允许水分子通过,从而能够平衡金字塔底部的透明有机玻璃板18两侧所受的压力,减小有机玻璃板18形变带来的光线折射,也防止玻璃板被压碎。
47.本实施例中,所述推进器包括两对垂直安装于碟形外壳左右两侧的推进器ⅰ16和两对水平安装于碟形壳体前后两侧的推进器ⅱ17;同侧的两个所述推进器ⅱ17的轴线夹角为60
°
,如图2所示,水下机器人本体1的动力来源于自身搭载的8个推进器。其中4个推进器ⅰ16两两垂直安装于壳体两侧,控制推进器的正反转,实现升潜运动。另外4个推进器ⅱ17水平安装在碟形壳体前侧和后侧的圆周上,且在前后方向上同侧的两个推进器ⅱ17的中轴线夹角为60
°
,实现了推力和转矩的优化组合,控制rov在水平面上平移和转动。
48.本实施例中,所述传感器包括惯性测量单元114、超短基线115和深度传感器14。由于电磁波在水下严重衰减,故gps信号或者北斗定位信号无法应用于水下。采用超短基线115,通过声波信号实现水下机器人的定位;结合惯性测量单元114和电子罗盘测量的航向角度来共同实现导航功能,另外使用深度传感器14来测量下潜作业深度。
49.本实施例中,所述超声波清洗模块包括设置于视窗边框19两侧的换能器震头安装板110和用于激发换能器震头安装板110振动的超声换能器震头111,当然,碟形壳体内部还应设置有为换能器震头111供电的蓄电池。超声波清洗模块采用超声清洗方式进行清洗。利用超声波在水中传播产生的空化效应,通过超声换能器震头111,将电流信号转化为超声信号,并输出机械能通过换能器金属安装板110传输至水中,水中产生的空泡遇到超声波作用后发生爆炸,爆炸带来的冲击波足以把泥沙等沉积物从检测表面移除。
50.本实施例中,所述抓手驱动组件包括微型减速电机313、通过联轴器319与微型减速电机313的转轴连接的丝杠320、与丝杠320通过螺纹配合的丝杠螺母315和固定于丝杠螺母315的伸缩杆316;所述伸缩杆316的下端通过伸缩支架321铰接于抓手的手指末端。本实施例的抓手模块只有一个主动自由度,抓手模块包括筒状的抓手机体314、绕所述抓手机体314环形均布的四个螺旋桨推进器、设置于抓手机体314下方的抓手和设置于抓手机体314内用于驱动所述抓手动作的抓手驱动组件;微型减速电机313通过固定托板310固定安装于抓手机体314内,抓手机体314顶部通过椭圆形密封端盖311封闭,该密封端盖311上设有缆线接头312用于通过缆线2与水下机器人本体1连接,抓手机体314设有带有减速器的微型电机,通过联轴器将减速器输出轴和丝杠320相连,并将伸缩杆316固定在丝杠螺母315上。如图15、16,抓手包括左手指322(a)和右手指322(b),左手指322(a)和右手指322(b)通过铰轴318相互铰接,伸缩杆316的下端通过伸缩支架321与两手指之间的铰轴318铰接;手指机体下端固定有手指支架;手指支架底部设有两对手指连杆,左手指322(a)和右手指322(b)分
别与两对手指连杆下端铰接,手指连杆具有一定柔性,在爪手开合的过程中能够发生一定变形量,避免卡死;微型减速电机313固定在手指机体内,当电机输出扭矩带动丝杠320转动时,丝杠螺母315沿着丝杠320轴向上下移动,进而通过伸缩杆316带动左手指322(a)和右手指322(b)的铰轴318上下运动,从而利用伸缩杆316的伸出和缩回来控制抓手的张开和闭合。手指机体侧部固定有四个沿周向均布的螺旋桨推进器;螺旋桨推进器包括连接于手指机体外的螺旋桨安装壳体33、安装于螺旋桨安装壳体33内的无刷电机39和通过联轴器38和螺旋桨连接轴37固定连接于无刷电机39转轴的螺旋桨35;螺旋桨安装壳体33的上端和下端分别通过椭圆形密封上盖32和椭圆形密封下盖34密封。螺旋桨35的外侧有防护罩31,以防止螺旋桨35割断缆线2。同时防护罩31和抓手机体314外壳都设计为椭球形流线结构,以减小流体阻力。抓手机体314和螺旋桨推进器采用o型圈和螺栓实现端面静密封和螺旋桨连接轴37和转轴的旋转动密封。整个抓手模块由电缆和柔性钢索连接在水下机器人本体1上,以获取能量和机器人主体提供的牵引力保障。抓手由两个单边手指相互铰接形成,其上设计有防滑沟槽和柔性网兜,柔性网兜可在抓手收紧过程中,提供部分扩展体积,防止在抓取海参等海产品过程中,因抓手收紧而造成的海产品被捏碎或被破坏,也可在抓取体积较大物体时提供更大的容纳空间。
51.以上仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化;凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1