一种全自动的水面航行式垃圾清理工具
1.本实用新型属于水面垃圾清理技术领域,具体涉及一种基于大数据兼有数据采集,检测和后期分析一体化的智能水质监测系统。
背景技术:
2.进入21世纪以来,我国水域垃圾污染问题日益严重。水域垃圾已经成了水体污染的重要来源,不仅影响了海洋江河湖泊生态系统,危害到居民健康,还对景观造成了严重的损害。甚至是对航道,大坝造成巨大的威胁,造成严重的经济损失。因此,水域垃圾的清理变得尤为重要,但当前对水面垃圾的清理主要采用大型机械打捞和人工打捞两种形式。前者打捞成本极高,排放的烟尘还会造成二次污染;后者耗时耗力效率低,存在一定的安全风险。
技术实现要素:
3.为解决上述技术问题,本实用新型提出了一种全自动的水面航行式垃圾清理工具。本实用新型弥补了小型垃圾清理装置自动化、智能化不足的缺点,实现之后通过程序的控制能实现垃圾的自动清理(这里的垃圾指漂浮在静态水面上的小型漂浮垃圾)、自动避障、水质检测、油污清理功能等,可扩展性非常好,安全、可靠、成本低,便于推广和应用。
4.本实用新型的目的通过以下技术方案实现:
5.一种全自动的水面航行式垃圾清理工具,包括船体,船体包括清洁船外壳,清洁船外壳内部形成有前端开口的内腔,后端安装有网格层,底部为栅状结构,底部安装有水下推进器,所述清洁船外壳外部两侧固定有u形杆,u形杆上套设有横杆,两个横杆之间固定有油污清理结构;所述清洁船外壳的底部还安装有若干水质检测探头;清洁船外壳的内腔的顶部安装有垃圾集满传感器,水质检测探头和垃圾集满传感器电连接有无线收发模块。
6.进一步的改进,所述油污清理结构为装在布袋中的活性炭。
7.进一步的改进,所述网格层四角连接有辅助杆,且网格层滑动连接在清洁船外壳的内腔内。
8.进一步的改进,所述清洁船外壳顶部安装有北斗导航模块,前端顶部两侧安装有led灯,前端顶部的中部安装有摄像头和避障传感器。
9.进一步的改进,所述水质检测探头包括ph值探头、tds水质检测探头、电导率探头、氧化还原探头、浊度检测探头;水质检测探头均电连接有水质检测模块。
10.进一步的改进,所述船体内安装有主控板,主控板上安装有stm芯片、无线收发模块、电调模块、水质检测模块和gps芯片;所述无线收发模块为nrf无线收发模块。
11.本实用新型的有益效果在于:
12.弥补了小型垃圾清理装置自动化、智能化不足的缺点,实现之后通过程序的控制能实现垃圾的自动清理(这里的垃圾指漂浮在静态水面上的小型漂浮垃圾)、自动避障、水质检测、油污清理功能等,可扩展性非常好,安全、可靠、成本低,便于推广和应用。
附图说明
13.利用附图对本实用新型做进一步说明,但附图中的内容不构成对本实用新型的任何限制。
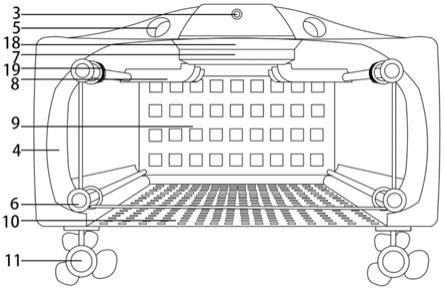
14.图1为本实用新型的主视图;
15.图2为本实用新型的侧视图;
16.图3为本实用新型中的俯视图;
17.图4为本实用新型内部主控制器的模块分布示意图;
18.图5为本实用新型数据传输流程图;
19.图中:油污清理结构1,北斗模块2,摄像头3,清洁船外壳4,led灯5,辅助杆6,主控板7,连接杆8,网格层9,栅状结构10,水下推进器11,水质检测探头12,nrf24101无线收发模块13,电调模块14,水质检测模块15,stm32芯片16,gps芯片17,垃圾集满传感器18,避障传感器19,u形杆20,横杆21。
具体实施方式
20.为了使实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实例,对本实用新型进行进一步的详细说明。
21.实施例1
22.如图1
‑‑
图4所示,本具体实施方式的一种全自动的水面航行式垃圾清理工具,采用以下技术方案:它包括油污清理结构1、北斗模块2、摄像头3、清洁船外壳4、led灯5、辅助杆6、主控板7、连接杆8、网格层9、栅状结构10、水下推进器11、水质检测探头12、nrf24101无线收发模块13、电调14、水质检测模块15、主控芯片16、gps芯片17。主控芯片和led灯均与锂电池组相连接。
23.清洁船外壳4的顶部设有led灯5,辅助船体在夜间航行;所述清洁船外壳4的前端为开向设计,在船面航行遇到垃圾时,垃圾从前端开口进入;清洁船外壳4的内部为垃圾收集腔,所述垃圾收集腔的顶部设有垃圾集满传感器18,垃圾集满时会发送信号给主控板停止垃圾的收集。
24.清洁船外壳4的前端设有避障传感器19,方便船体在水面避障前进,提高工作效率;清洁船外壳4的底部设有水下推进器11,所述水下推进器11由正反桨一对3050无刷水下推进器组成,可以相互抵消电机运行时转动所产生的干扰,控制船模的稳定,保障船模在水面的航行;所述清洁船外壳4的尾部设有栅状结构10,此设计使得船在水面航行及收集垃圾时,水流可从栅状结构中流过,减少了船航行的阻力所述清洁船外壳4的底部设有垃圾吸入口,所述吸入口的四周设有网格层9,方便吸入垃圾时水流从中流过,使收集垃圾更加顺利。
25.船体4上设有相互连接的nrf无线收发件和北斗模块2,所述nrf无线收发件13、北斗模块2和led灯5均与锂电池组连接,当清理工具遇到障碍物时,北斗模块会将当前位置通过无线收发件发送给其它清理工具记录当前位置,完成自动避障功能;led灯能满足该清理装置的夜间正常工作。行驶所述船体顶部设有密封室,所述密封室内设有主控制器,主控制器上设有主控面板7;所述主控制器的主控面板上设有物联网模块、nb-iot通信模块、ph值模块、tds水质检测模块、电导率模块、氧化还原模块、浊度检测模块;所述物联网模块、nb-iot通信模块、ph值模块、tds水质检测模块、电导率模块、氧化还原模块、浊度检测模块均与
nrf24101无线收发件13、北斗模块2连接;所述nb-iot通信模块支持待机时间长、支持低功耗设备在广域网的蜂窝数据连接;所述的主控面板上设有主控芯片16;所述主控芯片16与主控面板上的各个模块连接,与各个模块共同控制装置的工作;电调模块14设置在主控面板的两侧;所述主控面板与锂电池组连接。
26.本具体实施方式中所述主控制器采用stm32嵌入式技术,以stm32f103r8t6芯片作为主控芯片,所述主控芯片16支持环境监测功能扩展,水质检测模块可正常运行;所述北斗模块2支持gps/北斗卫星联合定位;所述北斗模块与锂电池组连接,设在主控面板上的外部,此设计是为了北斗模块与北斗卫星连接,方便接收信号,从而进行船的定位。
27.本具体实施方式中所述的主控制器上的物联网模块、nb-iot通信模块均可连接到网络数据服务平台。其工作原理为:船体在水面航行,通过传感器和水质监测模块检测到的信息和gps坐标信息可通过物联网模块和nb-iot通信模块传输到网络数据服务平台,实现船体和网络数据服务平台的连接和数据传输共享。
28.本具体实施方式所述的水下推进器11的动力由锂电池组提供。其工作原理为:当船体需要左转时,通过内部设定程序控制左边推进器减速或停止运行,右边推进器保持不变,利用速度差和方向不同使船体改变行进方向,即可实现左转。同里,当船体需要右转时,通过内部设定程序控制右边推进器减速或停止运行,左边推进器保持不变,即可实现右转。
29.本实用新型一种集人工控制与自动巡航于一体的水面航行式垃圾清理工具,采用船体中空的结构,为船体在水面漂浮航行提供浮力,底部的网状结构和尾部的栅状结构,为船体在水面漂浮航行减少阻力,结构上的设计都保障了船体在水面正常高效航行和垃圾清理。
30.本具体实施方式的船体可通过模具一体式注塑成型,顶部的密封室另外密封安装,也可通过数片漂浮性能佳的材质加工的板块组装成型;船体尾部的油污清理结构1为布袋包裹的活性炭组成,通过两根横杆可安装在船体尾部,客户可根据需要进行组装和拆卸;船体所述的辅助杆组装在船体内部中空的垃圾收集腔的侧边,当垃圾集满时,通过拉动辅助杆,辅助杆后面的挡板将垃圾带出垃圾收集腔,垃圾进入其他处理装置。因此,本具体实施方式的一种全自动的水面航行式垃圾清理工具实施具有较强的灵活性,船体的大小可根据需要定制,可以清理的应用领域广泛。
31.最后应当说明的是,以上实施例仅用于说明本实用新型的技术方案而非对本实用新型保护范围的限制,尽管参照较佳实施例对本实用新型作了详细说明,本领域的普通技术人员应当了解,可以对本实用新型的技术方案进行修改或者等同替换,而不脱离本实用新型技术方案的实质和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1