一种四旋翼泵喷水下机器人
1.本实用新型属于水下电子设备技术领域,具体涉及一种四旋翼泵喷水下机器人。
背景技术:
2.海洋是人类可持续发展的重要基地,是人类未来的希望,开发利用海洋是解决当前人类社会面临的人口膨胀、资源短缺等一系列难题的极为可靠的途径。在海洋的勘测与开发过程中会用到水下机器人,而海洋的勘测与开发对水下机器人的的自由度、可控性以及使用效率等提岀了很高的要求。
3.水下机器人又称自主式水下潜器(autonomous underwater vehicle,简称auv)。auv的发展已经有60余年的历史,其自主携带电源,能够进行大范围的探测。为了节省能耗并减少水下阻力,auv大部分为缺少自由度的潜航器,缺乏在横摇、横倾、垂直运动方向的运动能力,无法完成具有实际应用意义的贴壁运动和单方向定深运动。
4.为了解决auv的上述问题,于是诞生了仿四旋翼无人机型的auv,一般称为quv(quadrotor underwater vehicle)。四旋翼无人机充分利用四个推进器之间的耦合关系来实现六自由度的运动,将它的推进器设计与auv融合,就得到了一种新型的auv模型。然而,由于quv的发展历程较短,其欠驱动的特点也使得quv的建模和控制十分困难。目前普遍采用的办法是调整四旋翼的摆放角度来获得其它方向的推力,但这改变了四旋翼欠驱动运动的特点,亦或是仅仅研究垂直方向的运动,而并没有结合auv的耦合动力学方程,忽略了水下机器人最本质的特点。
技术实现要素:
5.本实用新型的目的在于提供一种四旋翼泵喷水下机器人,以解决上述背景技术中提出的现有仿四旋翼无人机型的水下机器人(quv)建模以及控制困难的问题。
6.为实现上述目的,本实用新型提供如下技术方案:一种四旋翼泵喷水下机器人,包括壳体、控制桨组件、控制装置、两组泵喷装置以及摄像头,所述控制装置和摄像头均位于壳体内,摄像头位于壳体的头部,控制装置位于壳体的中部,两组泵喷装置位于壳体的尾部,所述控制桨组件设置于壳体的外围,控制桨组件包括水平设置的四旋翼。
7.优选的,所述控制桨组件还包括组件固定架,所述组件固定架设置于壳体的外围,所述四旋翼水平设置于组件固定架上。
8.优选的,所述四旋翼依次包括第一控制桨、第二控制桨、第三控制桨以及第四控制桨,所述第一控制桨的转向与第三控制桨的转向相同,所述第二控制桨的转向与第四控制桨的转向相同。
9.优选的,所述组件固定架包括左右对称布置的两个固定架基体,所述固定架基体包括多个固定部和一个安装部,所述固定部为半环形结构,所述安装部为直板结构,所述安装部连接于固定部的中部,左右多个固定部相对应连接将控制桨组件固定于壳体上,所述第一控制桨与第二控制桨依次固定连接于左侧的安装部上,所述第三控制桨与第四控制桨
依次固定连接于右侧的安装部上。
10.优选的,左侧的安装部上第一控制桨与第二控制桨之间设置有浮筒,右侧的安装部上第三控制桨与第四控制桨之间设置有浮筒。
11.优选的,所述控制装置由单片机及单片机的驱动构成。
12.优选的,所述控制桨组件的推进器为无刷电机。
13.与现有技术相比,本实用新型提供了一种四旋翼泵喷水下机器人,具备以下有益效果:
14.1.一种四旋翼泵喷水下机器人,设置两组泵喷装置结合水平设置的四旋翼,可用成熟的飞控算法来控制无人机在水下的姿态,采用两组泵喷装置作为水下机器人的动力来源,双泵喷可通过差速形成水下转向,同时利用泵喷的强大动力实现高速运动,不再需要通过调整水下机器人四旋翼的摆放角度来获得其它方向的推力,使得水下机器人的建模以及控制简单化。
15.2.一种四旋翼泵喷水下机器人,姿态控制更为成熟。四旋翼飞控系统已经在现有阶段得到广泛应用,其稳定性得到多方验证,且有大量的参考文献和参考代码,方便移植和创新。
16.3.一种四旋翼泵喷水下机器人,移动速度更快。泵喷装置的推力远大于一般的水下推进器。
17.4.一种四旋翼泵喷水下机器人,更小的体积和更灵活的姿态。由于采用四旋翼姿态调整,其体积约为一般传统水下机器人的一半左右。更少的零部件决定其造价更为便宜,同时姿态调整更为方便,避免传统水下机器人笨重的身姿。
附图说明
18.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制,在附图中:
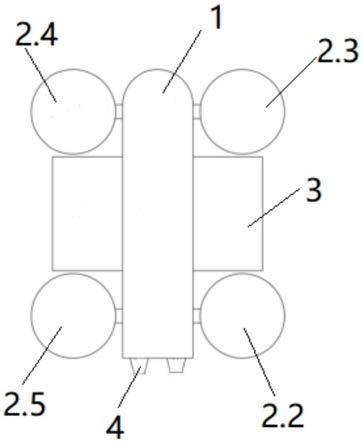
19.图1为本实用新型一种四旋翼泵喷水下机器人的平面结构示意图;
20.图2为本实用新型一种四旋翼泵喷水下机器人的立体结构示意图;
21.图3为图2另一视角的结构示意图;
22.图4为图3另一视角的结构示意图;
23.图5为四旋翼泵喷水下机器人位置调节原理示意图;
24.图6为pid控制四旋翼泵喷水下机器人控制桨的框图;
25.图7为串级pid控制四旋翼泵喷水下机器人控制桨的框图;
26.图中:1、壳体;2、控制桨组件;2.1、组件固定架;2.11、固定架基体;2.111、固定部;2.112、安装部;2.2、第一控制桨;2.3、第二控制桨;2.4、第三控制桨;2.5、第四控制桨;3、浮筒;4、泵喷装置。
具体实施方式
27.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下
所获得的所有其他实施例,都属于本实用新型保护的范围。
28.请参阅图1
‑
7,本实用新型提供一种技术方案:一种四旋翼泵喷水下机器人,包括壳体1、控制桨组件2、控制装置、两组泵喷装置4以及摄像头,所述控制装置和摄像头均位于壳体1内,摄像头位于壳体1的头部,控制装置位于壳体1的中部,两组泵喷装置4位于壳体1的尾部,所述控制桨组件2设置于壳体1的外围,控制桨组件2包括水平设置的四旋翼;
29.所述控制桨组件2还包括组件固定架2.1,所述组件固定架2.1设置于壳体1的外围,所述四旋翼水平设置于组件固定架2.1上;
30.所述四旋翼依次包括第一控制桨2.2、第二控制桨2.3、第三控制桨2.4以及第四控制桨2.5,所述第一控制桨2.2的转向与第三控制桨2.4的转向相同,所述第二控制桨2.3的转向与第四控制桨2.5的转向相同;
31.所述组件固定架2.1包括左右对称布置的两个固定架基体2.11,所述固定架基体2.11包括多个固定部2.111和一个安装部2.112,所述固定部2.111为半环形结构,所述安装部2.112为直板结构,所述安装部2.112连接于固定部2.111的中部,左右多个固定部2.111相对应连接将控制桨组件2固定于壳体1上,所述第一控制桨2.2与第二控制桨2.3依次固定连接于左侧的安装部2.112上,所述第三控制桨2.4与第四控制桨2.5依次固定连接于右侧的安装部2.112上;
32.左侧的安装部2.112上第一控制桨2.2与第二控制桨2.3之间设置有浮筒3,右侧的安装部2.112上第三控制桨2.4与第四控制桨2.5之间设置有浮筒3;
33.所述泵喷装置4为双泵喷推进器,双泵喷推进器为水下机器人的动力来源;
34.所述控制装置由单片机及其驱动构成;
35.所述控制桨组件2的推进器为无刷电机;
36.工作原理:
37.水下机器人包括四个控制浆与两个推进泵,可以将水下航行器在水中的运动类比于四旋翼无人机在空中的运动,它们的性质是一样的,因此算法完全可以通用。第一控制桨2.2、第二控制桨2.3、第三控制桨2.4以及第四控制桨2.5为四个水下浆推进器,两条对角线上的第一控制桨2.2电机和第三控制桨2.4电机逆时针旋转(反浆),第二控制桨2.3电机和第四控制桨2.5电机顺时针旋转(正浆),因为旋翼产生升力的同时会产生反扭力,对称安装可以抵消反扭力。
38.请参见图5,以下为水下机器人的位置调节原理:
39.上下运动:同时同量增加四个控制桨电机的转速,则控制桨的总升力增大,当升力大于重力时,机器人上升;同时同量减小四个控制桨电机的转速,当总升力小于重力时,机器人下降。
40.前后运动:同量增加第一控制桨2.2电机和第四控制桨2.5电机的转速,同时同量减小第二控制桨2.3电机和第三控制桨2.4电机的转速,则后面的升力大于前面的升力,机器人向前俯仰(低头),总升力产生向前的分量。与此同时,升力的垂直分量会减小,将不再等于重力,因此需要同量增加四个控制桨的转速来补偿重力,从而实现向前飞行运动。同理,可以实现向后水平移动。
41.左右翻滚运动:与前后运动原理相同,同时同量减小第二控制桨2.3电机和第一控制桨2.2电机的转速,同时同量增加第四控制桨2.5电机和第三控制桨2.4电机的转速,机身
将向右滚转,然后总升力产生向右的分量。与此同时,升力的垂直分量会减小,将不再等于的重力,因此需要同量增加四个控制桨的转速来补偿重力,从而实现向右飞行运动。同理,可以实现向左水平移动。
42.偏航运动:同时同量增加第二控制桨2.3电机和第四控制桨2.5电机的转速,同时同量减小第一控制桨2.2电机和第三控制桨2.4电机的转速,此时顺时针的扭矩会增加,逆时针的扭矩会减小,总扭矩为顺时针,机器人将会顺时针旋转。此时总升力没有改变,不会产生上下运动。同理,可以实现逆时针水平旋转。
43.请参见图6、图7,可以通过调整四个控制浆的速度来实现不同的运动,初步使用pid作为控制器,设定值为机器人期望的角度,控制变量为控制浆的转速,被控变量为机器人实际方位角,mpu6050反馈机器人实际的角度。后续用串级pid作为控制器,使用角速度作为内环输入值。
44.控制桨的转速控制:水下浆推进器采用的无刷电机,使用电子调速器控制转速,单片机输出一定的频率和一定脉宽的pwm波,通过调节pwm脉宽,控制电调,从而控制无刷电机的转速。
45.水下机器人通讯:目前尝试用ps2无线手柄对水下机器人通讯,ps2手柄与单片机采用spi通讯协议,手柄与接收器的通信频段为2.4ghz,还可以使用其它方法或者用有线连接。
46.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1